OCTOPUS ABIGAIL
My majestic, glowing, slinky alter ego.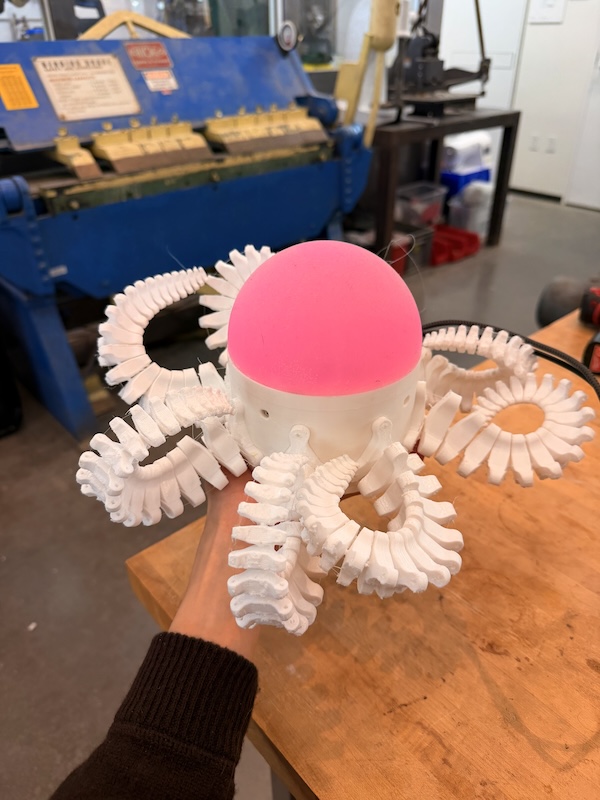
Here she is in action!
This was her first stretch of her legs... baby steps...
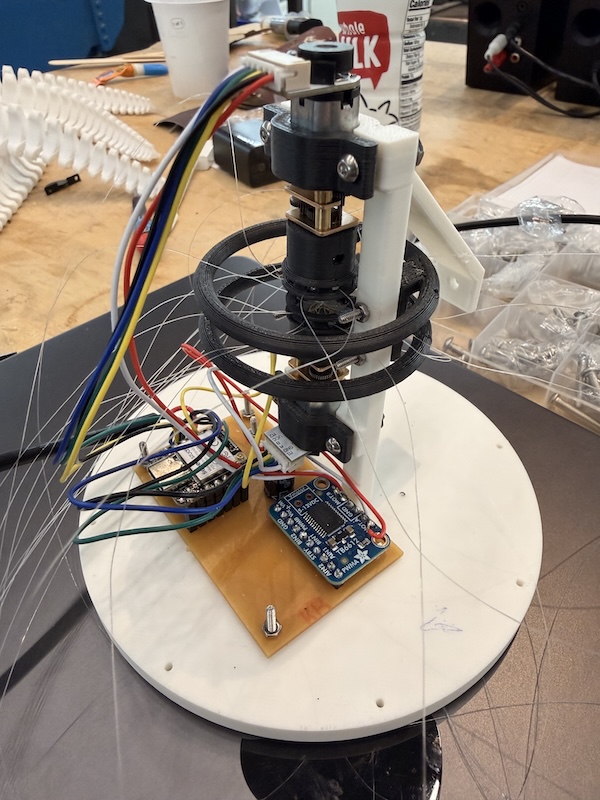
The compponents I used are:
- 2 N20 DC motors (link)
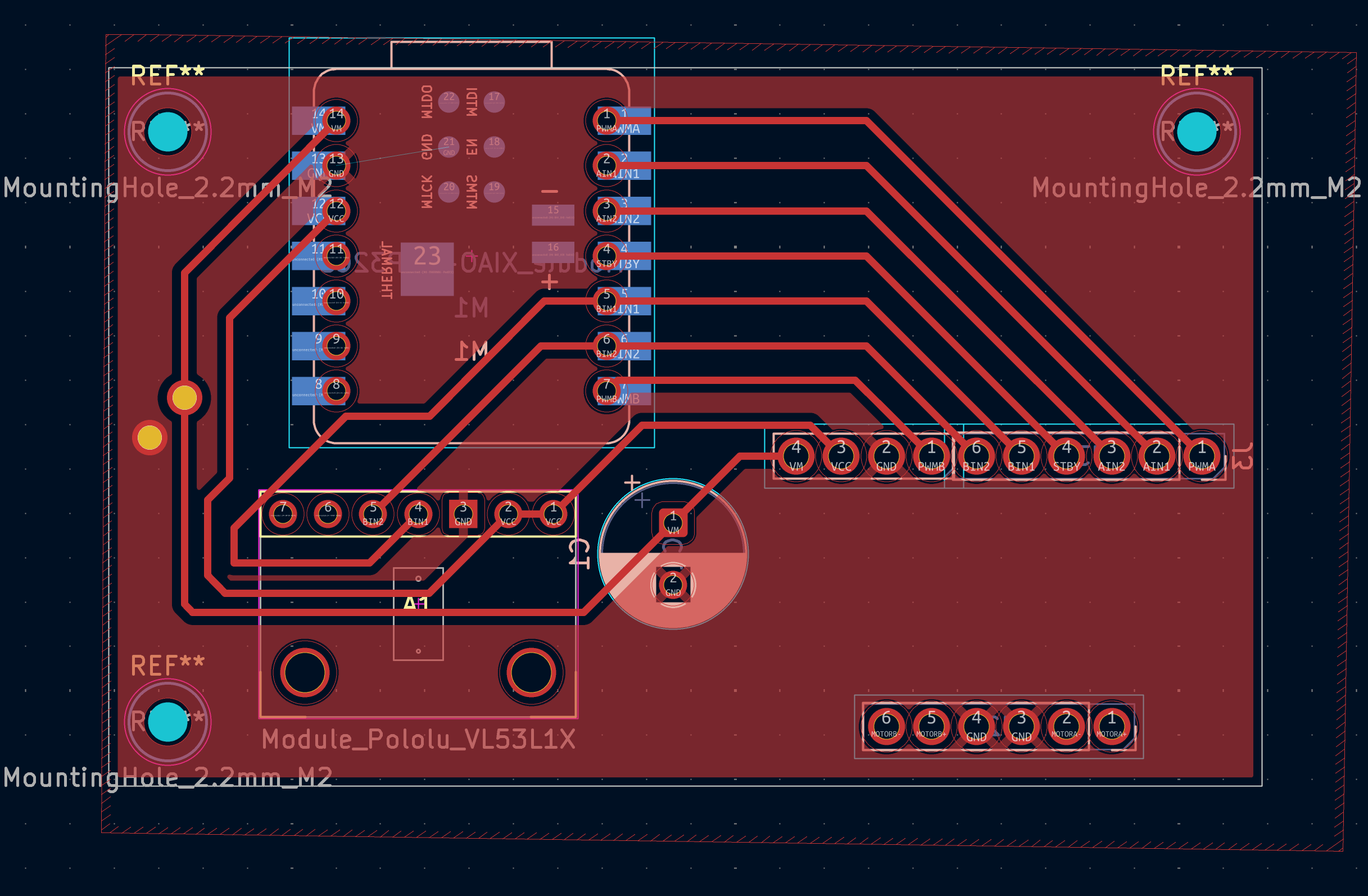
- 1 TB6612 DC driver(link)
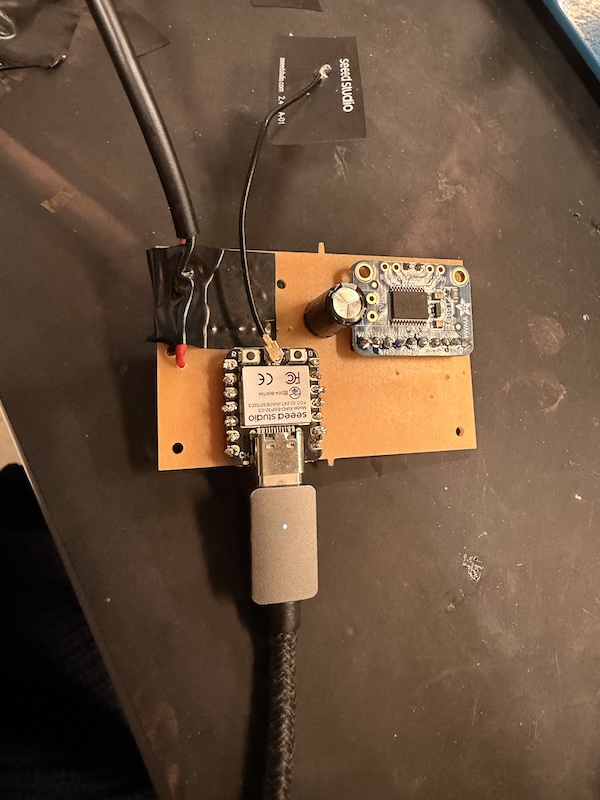
- 1 Xiao ESP32C3
- 1 470 uF 16V capacitor
- 1 Pololu VL53L5CX TOF distance sensor (this is in my system but unfortunately not currently being used)
Some pics of the process: I really reached flow state (heh heh) while soldering.

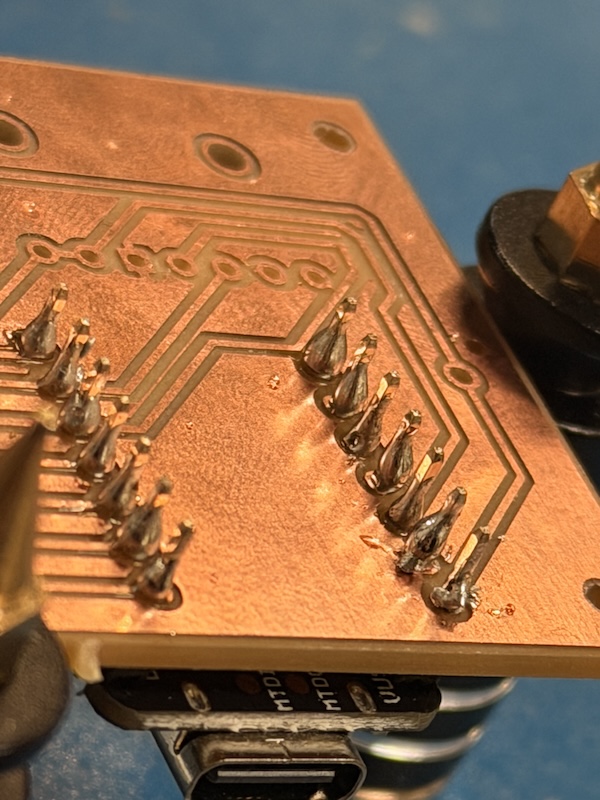
then i totally shorted my microcontroller and plugged it in without knowing and poof. fail.
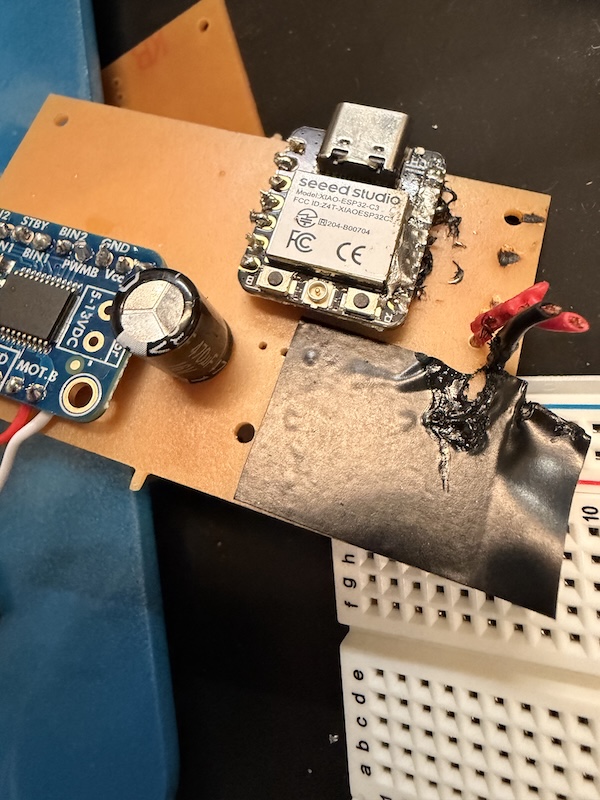
So this is me trying to desolder it to replace it but ended up starting over.
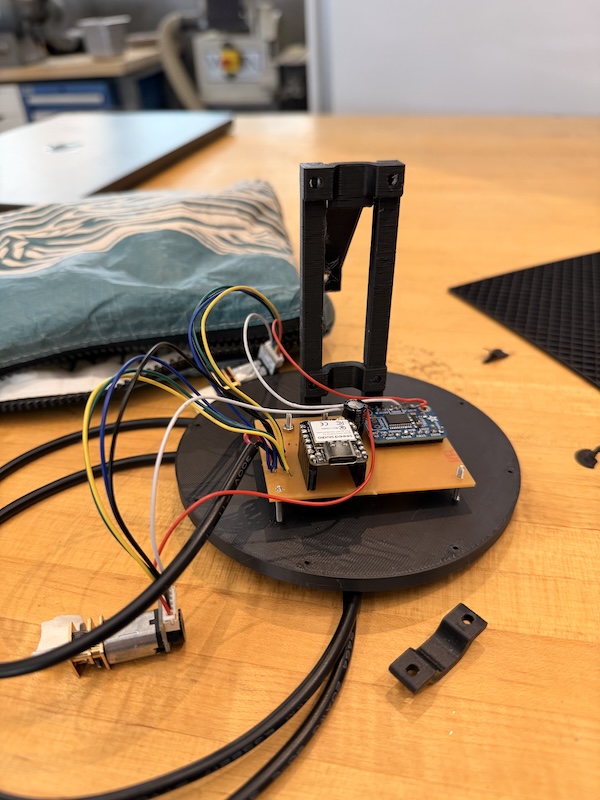
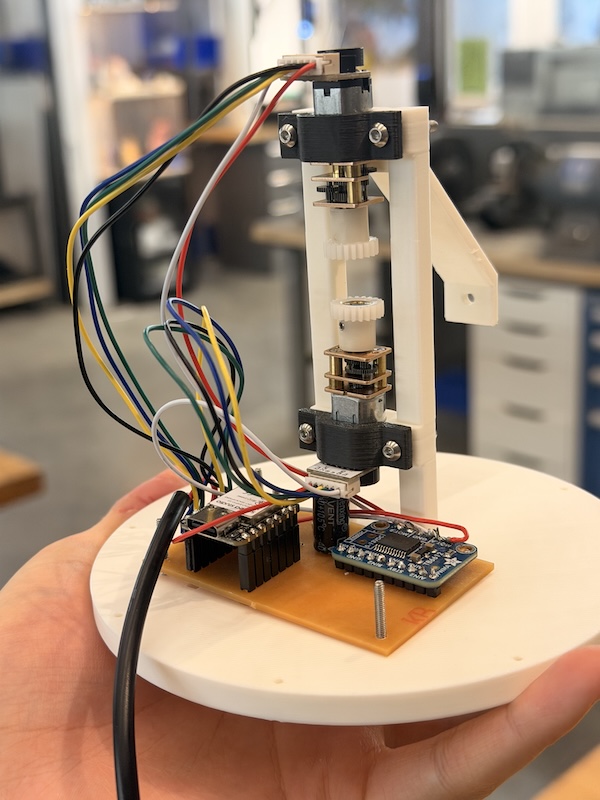
For building and assembly I:
- 3d printed the motor mount and body
- casted the squishy head using a 3d printed shell and silicone
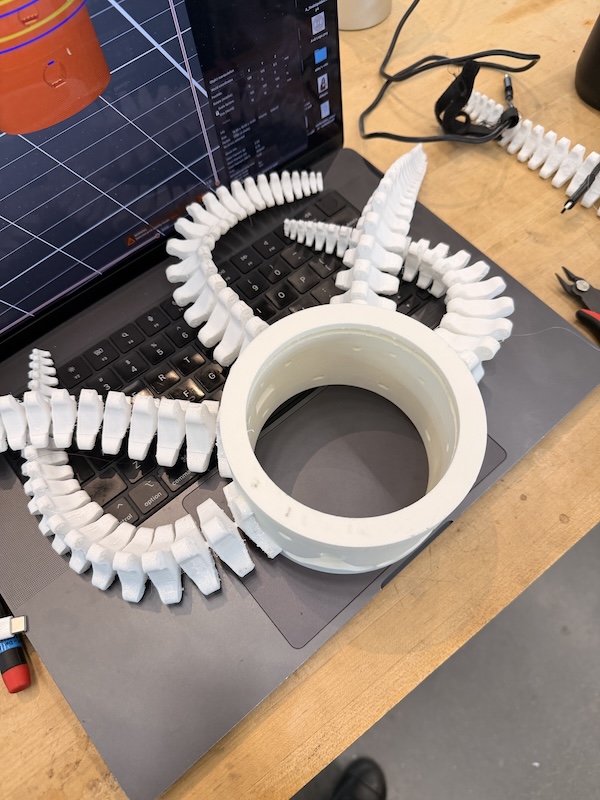
- 3d printed the tentacles out of TPU
- removed all of the TPU supports (this probably took me 8 hours) and drilled through the holes for the cables
- press fitted the tentacles into the body
- created a spool for the string and rings to guide the string to the holes
- used a needle to thread the strings through each tentacle (24 strings)
- used ChatGPT to help write my code and python GUi.
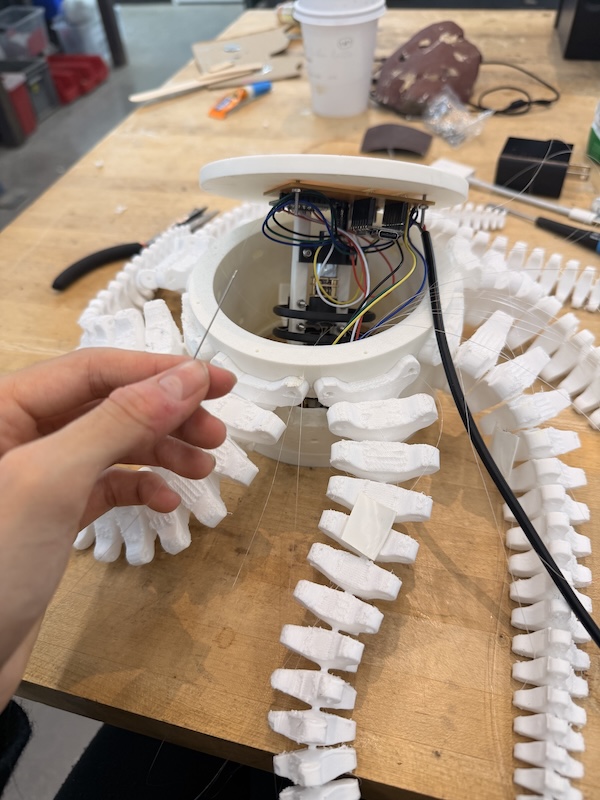
This was when it was a bit tangled... but here is how the cable mechanism works!

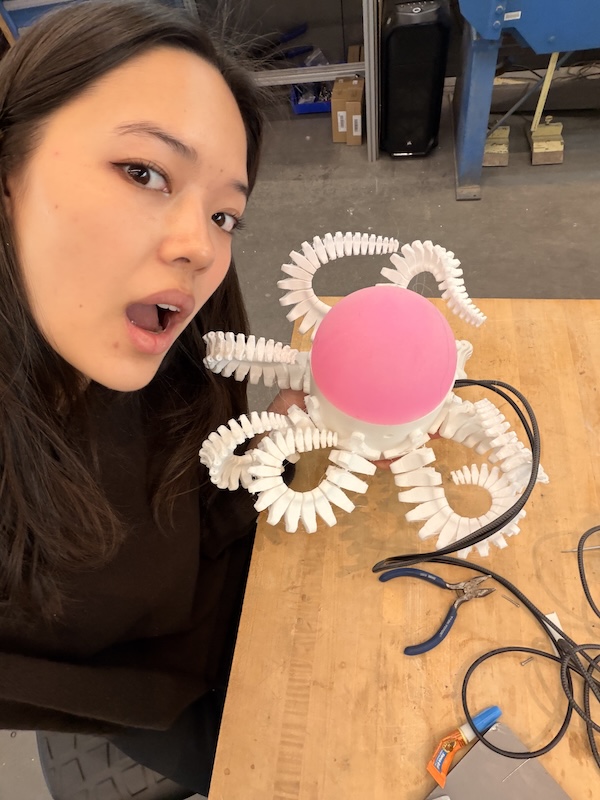
Me and twin... through thick and thin... and through the wee hours of the night.
NEXT STEPS !!!!
Because I did not quite get where I wanted...- fix the crazy string tangle and get every tentacle at its full range of motion
- be able to pick something up using my grab command
- get the head to fit better
- print TPU more cleanly
I would like to continue perfecting her and maybe making a prosthetic tentacle arm for fun if I can really tune the movement of the tentacles properly.
STL Files
Kicad Files
ChatGPT
Python GUi