End Effector + Voxel [Alex]
Pick, Place, Walk, Connection, Space, Collision, Disassembly.
Grip Test
main changes is on tolerance, fit, collision, and how it grabs the voxel. (could actually be even more stable)
..
Disassembly Feature
main changes is on tolerance, fit, collision, and how it grabs the voxel. (could actually be even more stable)
..
New Design for End Effector
main changes is on tolerance, fit, collision, and how it grabs the voxel. (could actually be even more stable)
New Design for End Effector
 works better / more stable
works better / more stable
Go back and make improvements (Two weeks ago I really thought it would be done by now)
System Intergration Robot + Claw + Base Plate
System Intergration Robot + Claw (connected)
System Intergration Robot + Claw (melting the solder connection plate)
End Effector Servor + Actuator / Claw
Servo Test (Fixed Angle and continuous )
Fixed Angle is for gripper, continuous is for the disassembly feature.
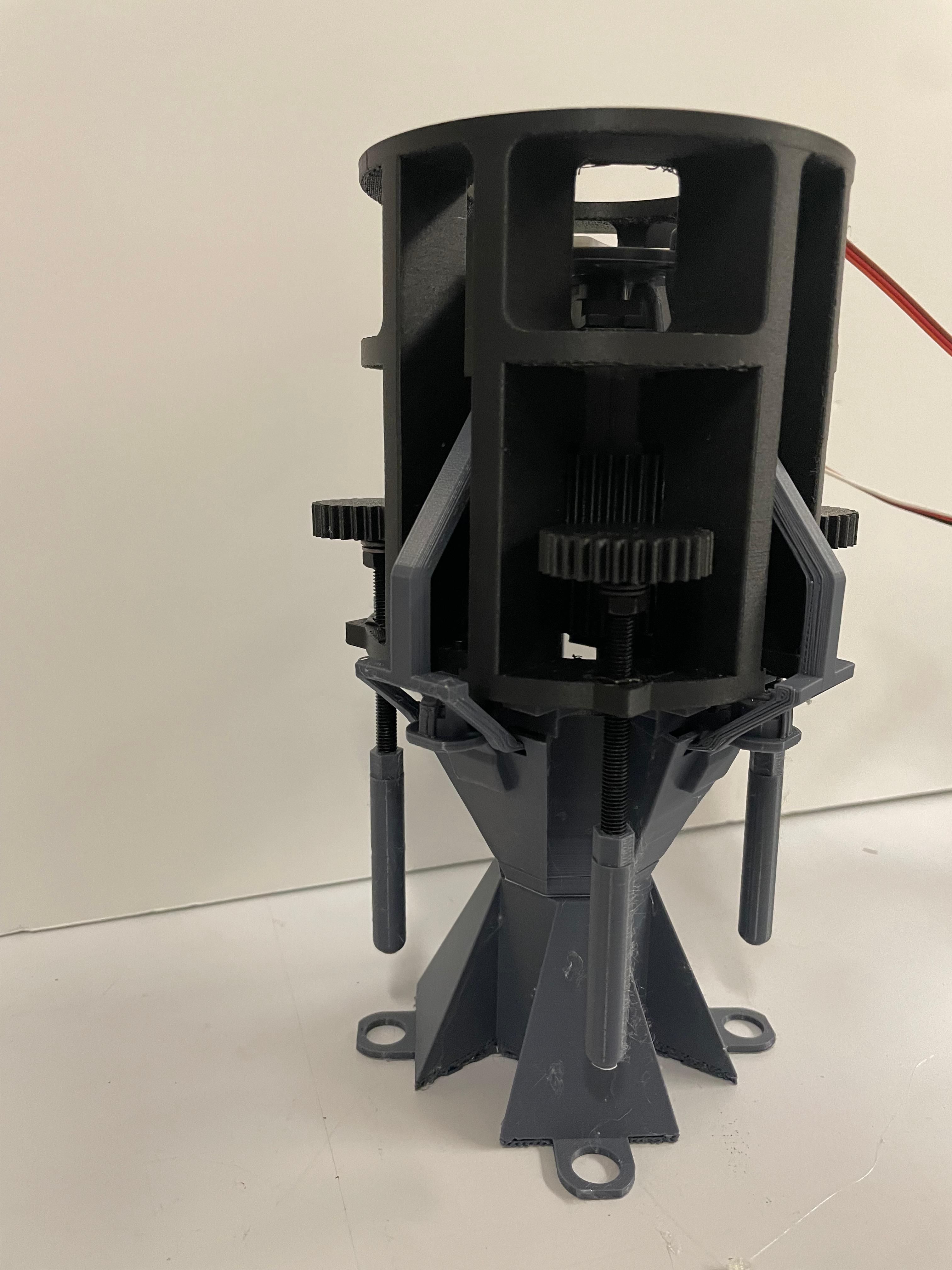
End Effector Servor + Gear Setup
End Effector Documentation
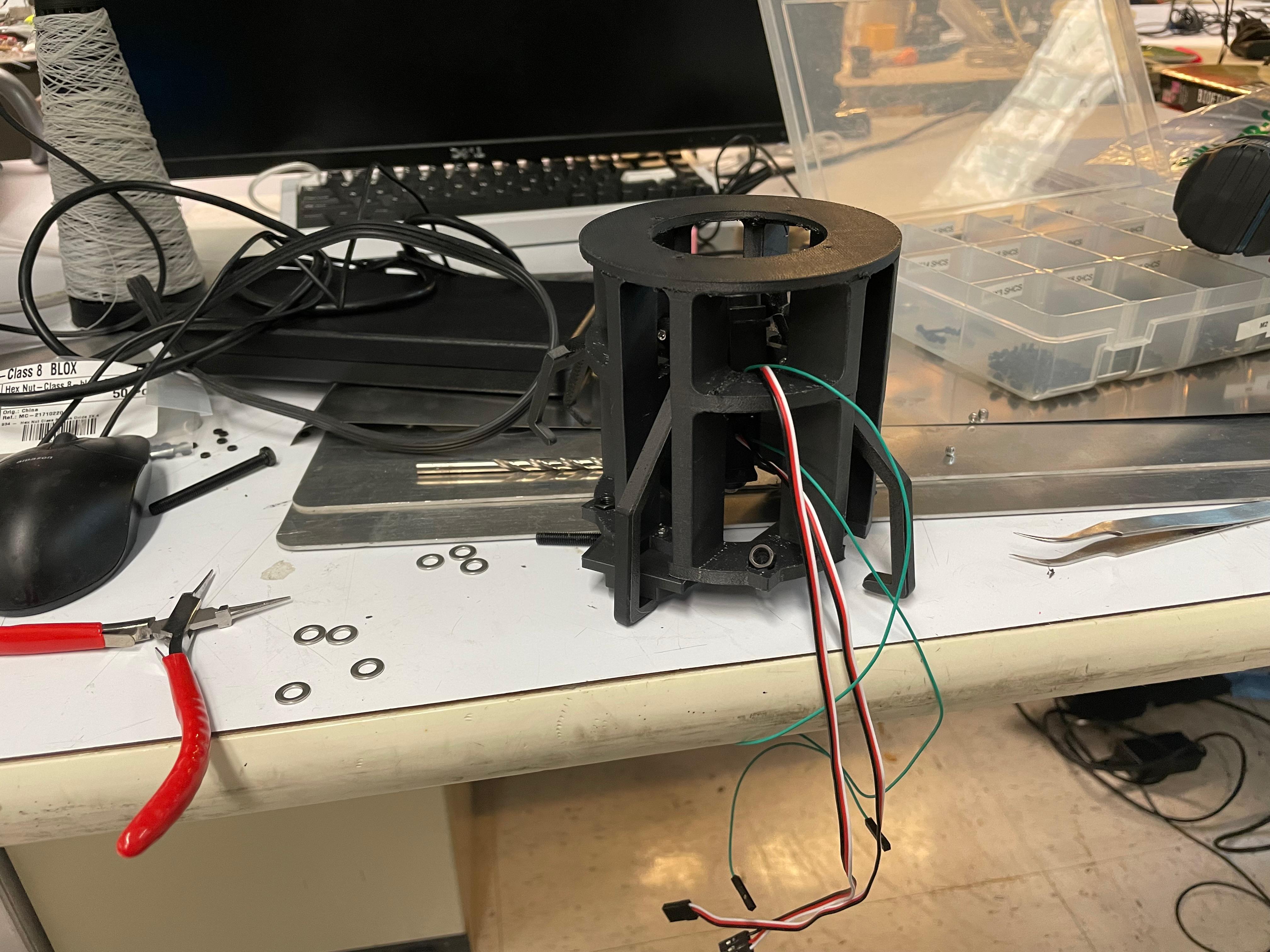
End Effector Assembly

End Effector 3D Printing
Robot Base Plate Fabrication
2 x 4 base grid
Robot Base Plate Fabrication
..
Voxel Production
..
Voxel Production
..
Fastener / Connection Tests
..
..
..
..
Back to CAD, System Refinement
..
..
Gripper + Actuating Fastener
..
..
..
Actuating Fasterner
..
..
System CAD Gripper + Actuating Fastener
..
..
..
Voxel Geometry
..
..
Actuating Fastener
..
..
Mock Up Gripper + Actuating Fastener
..
..
..
Design Change
Prototype
Prototype
Geometry Rhino 8 / Grasshopper
Folded Metal - design 1
Folded Metal Assembly
Rotate Alternate Voxels
Rotate Alternate Voxels
Issue
Rotate Base Geometry - Fixed ?!
Rotate Base Geometry - Fixed ?!