Week 1:
Intro week. Homework was a preliminary sketch + model of a potential final project idea.
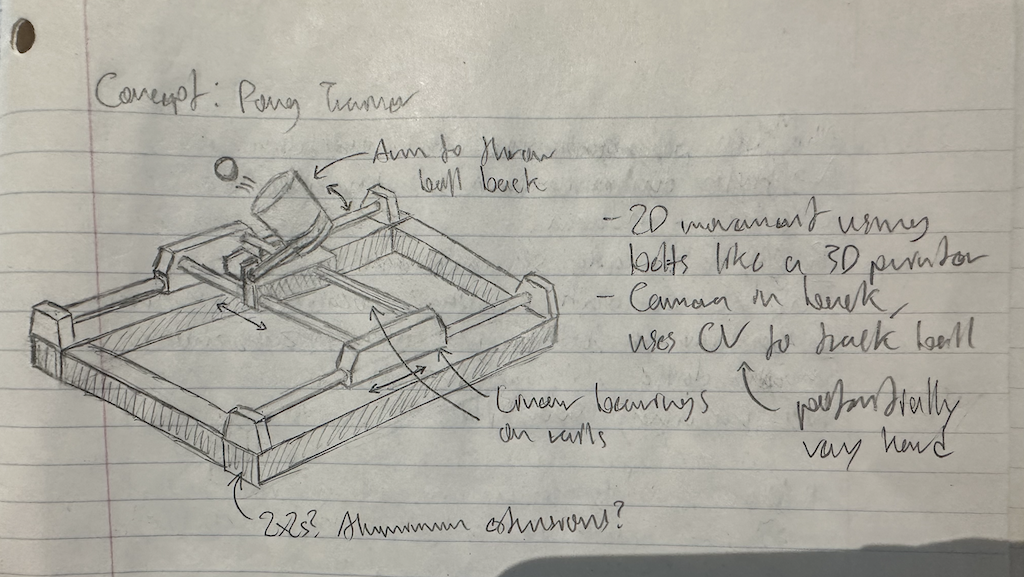
A while back, I saw this great video by Mark Rober where he built a never-miss dartboard–he used computer vision to track the path of the dart, and the board itself would move to intercept it at the bullseye. My idea is something similar, but instead of darts, for the legendary college classic game of beer pong.
Imagine, a (red) solo cup that can move on a 2D-axis, guided by a pair of cameras that continuously triangulate the ping pong ball’s position mid-arc and use that information to determine where to move the cup to catch it. Now, on its own, the project is ultimately nothing but a useless novelty. It catches the ball. Cool, I guess. However, there’s a second part. Instead of just a static cup, put the cup on a little throwing arm. Then, you can also throw the ball back to the user, creating a gameplay loop. Now, you can use the device as a practice bot by constantly attempting to make shots. If your shot’s on target, the cup doesn’t move. If you miss, the bot catches the ball for you instead of the ball bouncing off somewhere and you having to run after it like a goofy. Either way, the bot then pops the ball back up at you, you catch it (hopefully), and can take another shot quickly. Essentially, you’ve created a closed-loop shooting gallery for beer pong. And that, I think, is pretty neat. I also genuinely think it’d be a useful tool if you wanted to get good at the game.