Week 1 -- Final Project Proposal
9/12/12
When thinking about potential final projects, it's hard to settle on a single thing. This is especially true knowing that what I know will change over the course of the semster - so predefining what I'll be building at the end seems a bit daunting.
What I have been able to figure out though is that the projects I keep thinking share a few common attributes. In a final project, I'd like to build something that has the following qualities:
- Locomotes
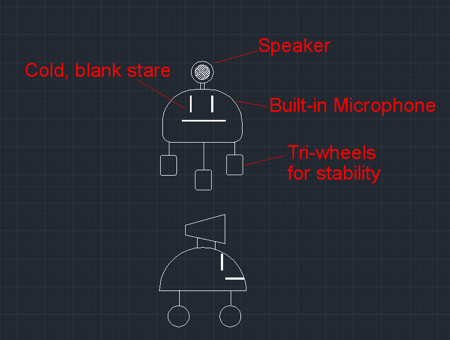
- Has a Personality (face)
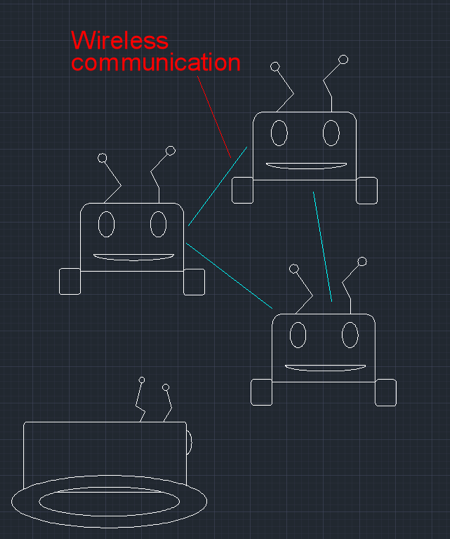
- Communication Magic (inspires a feeling of 'how did it know that?')
Mini Monster Military
A fleet of tiny (friendly) monsters that can locomote themselves and communicate amongst themselves. A monster can send requests like 'head north!' and all monsters in the troop will move in the same direction. Or perhaps - they could communicate combat moves: 'do an awkward dance!' and they'll all squirm the same goofy dance.
Febrezer
Capable of detecting sounds akin to methane generation, localizing the source of the sound and locomoting itself into the afflicted zone to dispense air freshener.
Conversation Anti-Awkwarder
Detects sudden drops in the loudness of conversations and is capable of applying social recovery techniques. In 'dinner-conversation' mode, the Anti-Awkwarder will listen to a conversation and detect a sharp drop in noise level - indicating that uncomfortable situation where everyone has run out of witty things to say. At this point, the anti-awkwarder will deliver a controversial statement ('Did you hear they faked the moon landings because JKF was a Scientologist?'), to spark emotions and conversation.
In 'joke' mode, the anti-awkwarder will listen to conversations to detect sharp drop offs in conversation noise level, indicating a joke falling flat on its face. At this point, the anti-awkwarder will remedy the situation by providing supportive laughter or a sad trombone - depending on it's mood.
Method of Locomotion
I'm also interested in building a means of locomotion that is highly entertaining (read: goofy, inefficient, irregular). Standard wheels or treads seem a bit too easy and useful - so I plan to look at some novel ways of moving the little bots. A bit of inspiration comes from Sid's toys in Toy Story. Toys that have been smashed together with whatever is lying around, and as a result, have a unique personality and mode of operation.
Required Techniques
Part of my motivation for this type of project comes from the wide range of capabilities needed. Each of the How to Make modules would be demonstrated. Sensing, output, and communication would be used to let the bots interact with each other and with people - while electronics, 3D printing, and mechanical design would be required for building something that actually moves and functions.