electronics
The Apfelstruder's electrical system is built on Jake Read's Squidworks hardware. His moduleboards, designed and manufactured (well, other than bare PCBs) in-house at the CBA, sit atop stepper drivers to spin motors: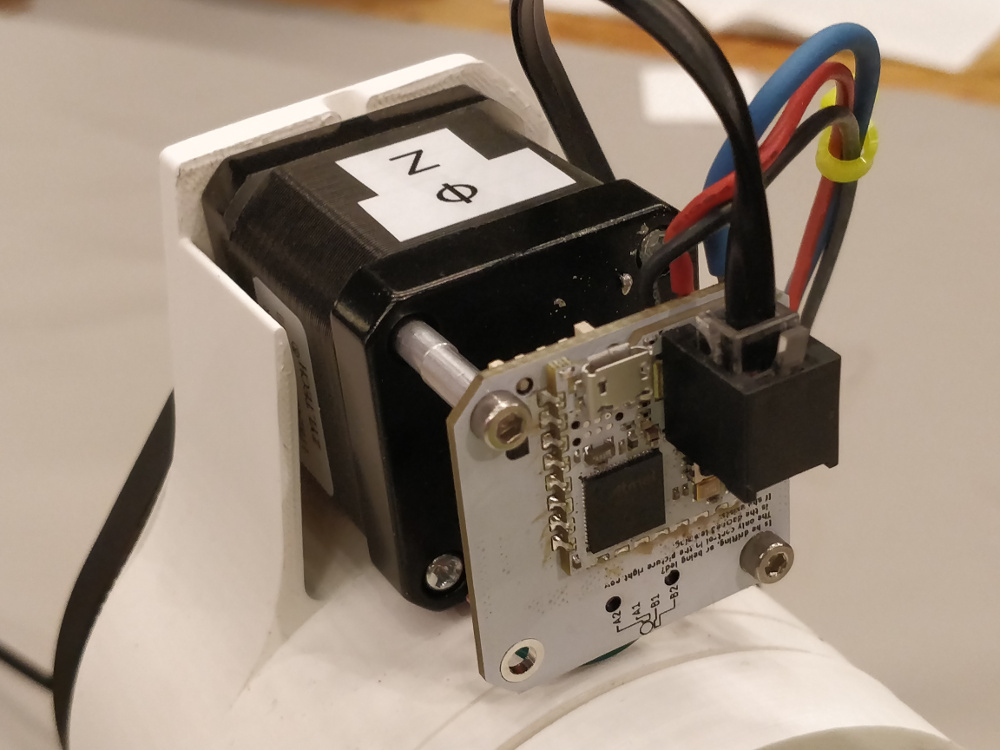 ... and a router board to manage control signals:
... and a router board to manage control signals:
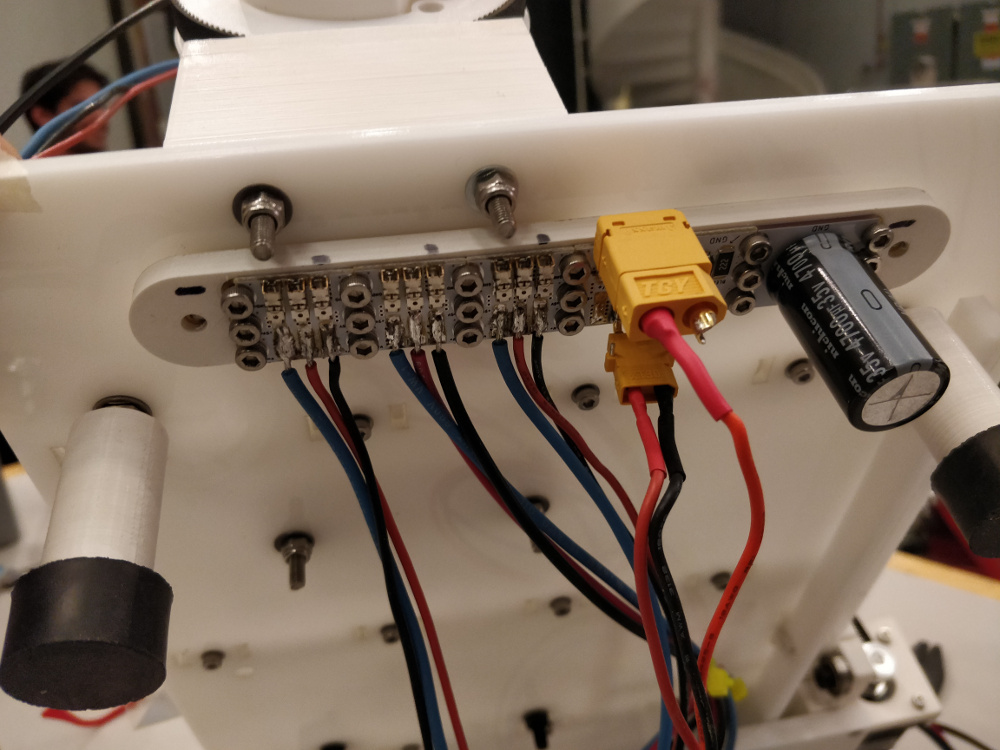
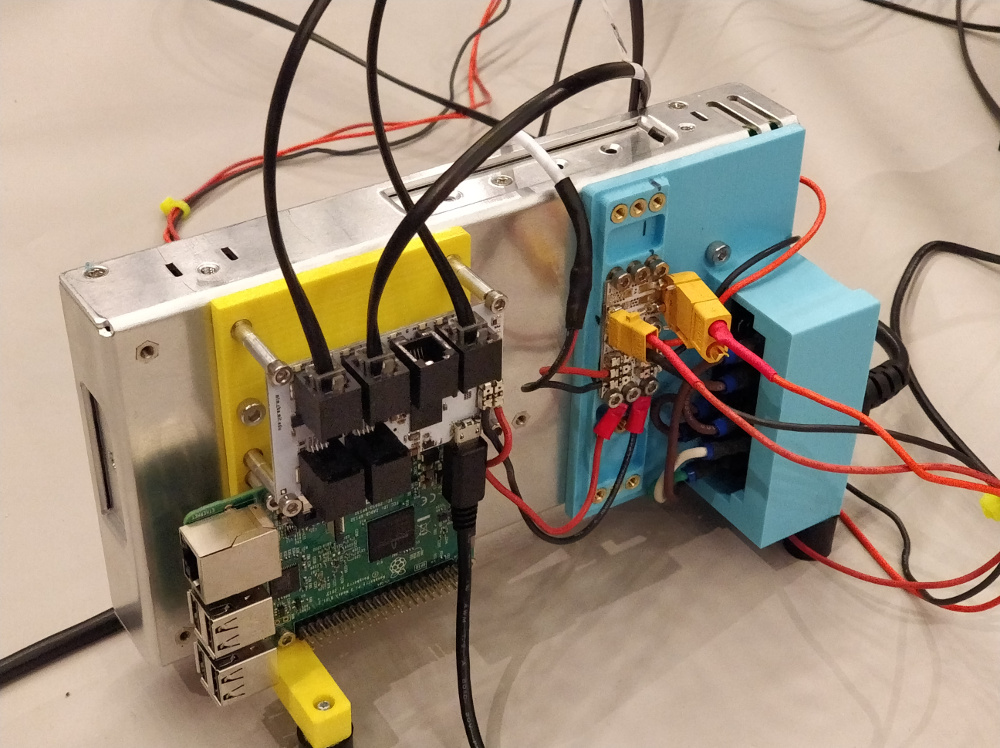 The router is mounted to a remote power supply unit that includes a Raspberry Pi running cuttlefish, Jake's in-browser dataflow machine control platform. On the machine, a detachable remote power distribution board provides 24 VDC and 5 VDC to the motors:
The router is mounted to a remote power supply unit that includes a Raspberry Pi running cuttlefish, Jake's in-browser dataflow machine control platform. On the machine, a detachable remote power distribution board provides 24 VDC and 5 VDC to the motors:
 We ran into a few electronics-related challenges during the week. Our router lost its bootloader a few times, necessitating the use of an Atmel SAM programmer to get the board back online:
We ran into a few electronics-related challenges during the week. Our router lost its bootloader a few times, necessitating the use of an Atmel SAM programmer to get the board back online:
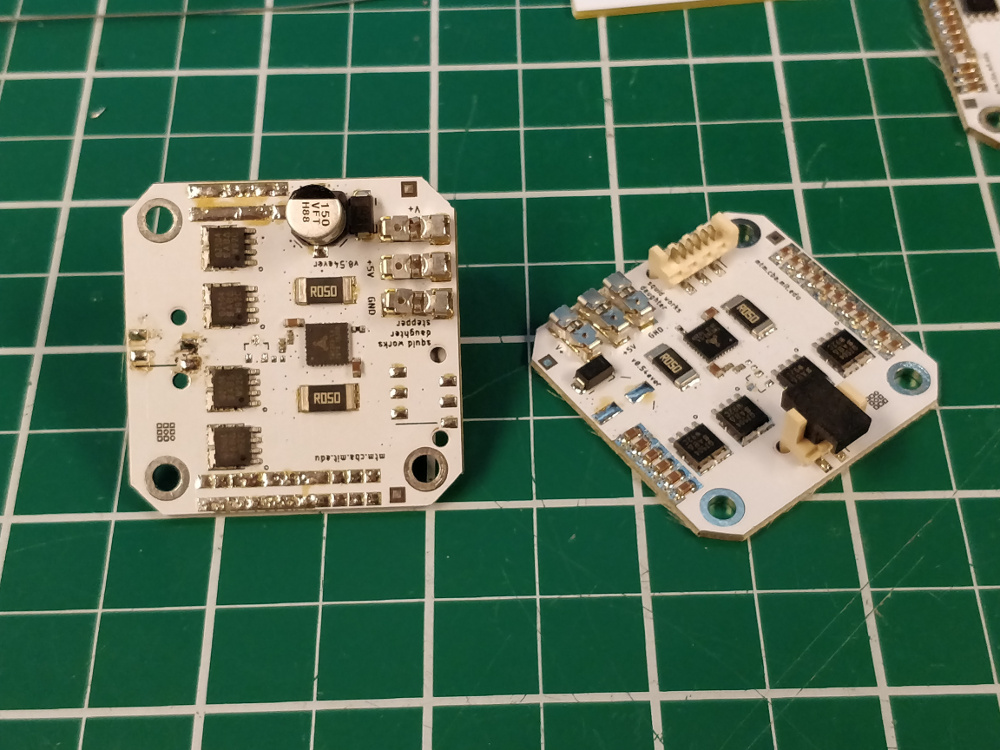
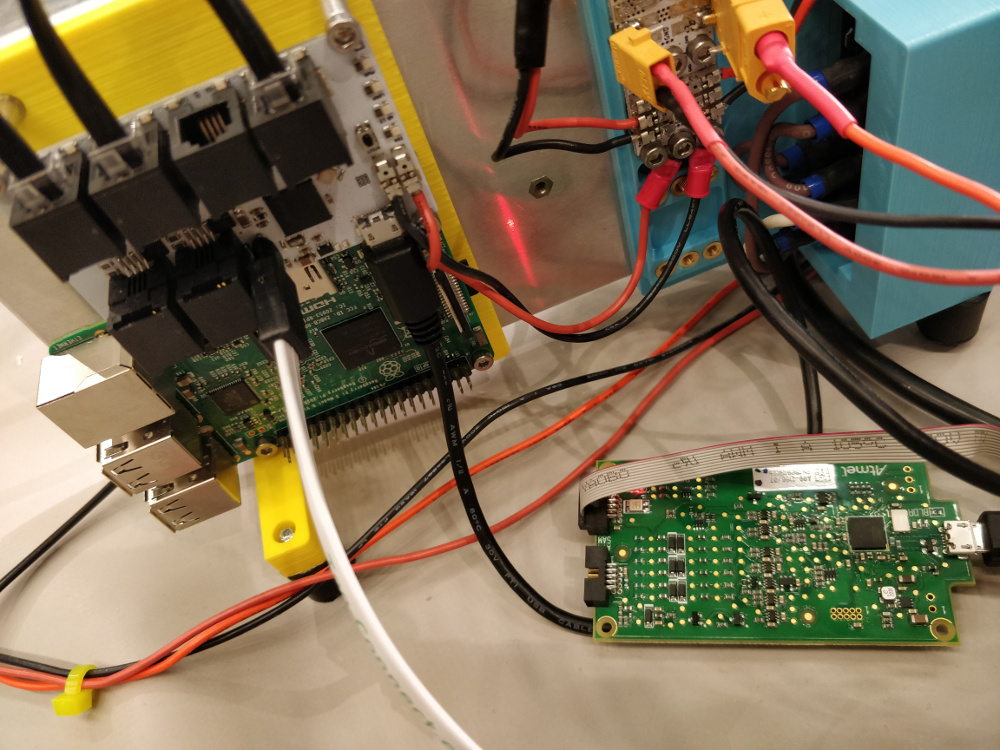 Stepper boards fared worse; a few nuked their MOSFETs, and we ran low enough that we had to rework our last carrier. We suspect one issue came from the use of electrolytic rather than ceramic capacitors on one board; the former has a higher ESR than the latter, meaning they may not be able to absorb back-EMF spikes from the motors and protect the semiconductor parts. Fortunately, Jake had a few cermaic capacitor-equipped boards we could use (on the right):
Stepper boards fared worse; a few nuked their MOSFETs, and we ran low enough that we had to rework our last carrier. We suspect one issue came from the use of electrolytic rather than ceramic capacitors on one board; the former has a higher ESR than the latter, meaning they may not be able to absorb back-EMF spikes from the motors and protect the semiconductor parts. Fortunately, Jake had a few cermaic capacitor-equipped boards we could use (on the right):
 As we ironed the electrical bugs out, a feeling of general euphoria washed over the group. Motors were spinning. Also it was late.
As we ironed the electrical bugs out, a feeling of general euphoria washed over the group. Motors were spinning. Also it was late.
 [pictured above, left to right: Fangzheng, Camron, Eyal, Sabrina]
[pictured above, left to right: Fangzheng, Camron, Eyal, Sabrina]
tracking
Day 2: 11/22/2019
We decided to run cuttlefish off of a Raspberry Pi for our final version, partially because that's how Jake has run it, and that seems to work, and partially because the idea of sshing into our machine to run it from any computer sounds really cool.

