interface
//Sasha McKinlay_ How to Make GUI 2021
import controlP5.*;//import ControlP5 library
import processing.serial.*;// allows processing to speak to Arduino
Serial port; //setting up serial
ControlP5 cp5; //create ControlP5 object
PFont font_Title; // Creating Fonts
PFont font_Sub;
PFont font_Button;
PFont font;
void setup() { //same as arduino
size (1000,1000); //window size (width, height)
// initializing serial
printArray(Serial.list()); // prints all available serial ports
port = new Serial (this, "COM7", 9600);// connect to arduino port, whichever Controller is connected to
cp5 = new ControlP5(this); //initialize CP5
//Managing Fonts
font_Title = createFont ("calibri light bold", 30); //custom fonts for buttons and title
font_Sub = createFont ("BaskervilleURW-Reg", 15); //custom fonts for buttons and title
font_Button = createFont ("BaskervilleURW-Reg", 20); //custom fonts for buttons and title
font = createFont("calibri light bold", 12);
// Add Button
cp5.addButton ("Mix_this") //this is the name of the button
.setPosition(375,825) //coodinates of upper left corner of button
.setSize(250,60) //(width, height)
.setFont(font_Button)
.setColorBackground(#231F23)
;
// Adding Text Fields
cp5.addTextfield("T_Ing1") //name of text field
.setPosition(170,700)
.setSize(120,30)
.setColorBackground(#B4B4B4) // set background colour
;
cp5.addTextfield("T_Ing2") //name of text field
.setPosition(350,700)
.setSize(120,30)
.setColorBackground(#B4B4B4) // set background colour
;
cp5.addTextfield("T_Ing3") //name of text field
.setPosition (530,700)
.setSize(120,30)
.setColorBackground(#B4B4B4) // set background colour
;
cp5.addTextfield("T_In43") //name of text field
.setPosition(710,700)
.setSize(120,30)
.setColorBackground(#B4B4B4) // set background colour
;
// Adding Sliders
cp5.addSlider("SliderVal")// name of slider
.setPosition (200,275)
.setSize( 60, 400)
.setRange (0,12)
.setValue(6)
.setNumberOfTickMarks (13)
.showTickMarks(false)
.setColorForeground (#231F23) // set foreground colour
.setColorBackground(#FFFFFF) // set background colour
.setColorActive (#231F23) //set active colour
.snapToTickMarks (true)
;
cp5.addSlider("SliderVal2")// name of slider
.setPosition (380,275)
.setSize( 60, 400)
.setRange (0,12)
.setValue(6)
.setNumberOfTickMarks (13)
.showTickMarks(false)
.setColorForeground (#231F23) // set foreground colour
.setColorBackground(#FFFFFF) // set background colour
.setColorActive (#231F23) //set active colour
.snapToTickMarks (true)
;
cp5.addSlider("SliderVal3")// name of slider
.setPosition (560,275)
.setSize( 60, 400)
.setRange (0,12)
.setValue(6)
.setNumberOfTickMarks (13)
.showTickMarks(false)
.setColorForeground (#231F23) // set foreground colour
.setColorBackground(#FFFFFF) // set background colour
.setColorActive (#231F23) //set active colour
.snapToTickMarks (true)
;
cp5.addSlider("SliderVal4")// name of slider
.setPosition (740,275)
.setSize( 60, 400)
.setRange (0,12)
.setValue(6)
.setNumberOfTickMarks (13)
.showTickMarks(false)
.setColorForeground (#231F23) // set foreground colour
.setColorBackground(#FFFFFF) // set background colour
.setColorActive (#231F23) //set active colour
.snapToTickMarks (true)
;
}
void draw (){ //same as loop in arduino
background (255,255,255); // background colour of window(r,g,b) or (0 to 255)
//making title backing
fill (35,31,32);
rect (200 , 70, 600, 45); // (X, Y, Width, Height)
// rect (560,275,60,400);
// making a title
fill (255,255,255); //text colour (r,g,b)
textFont(font_Title);
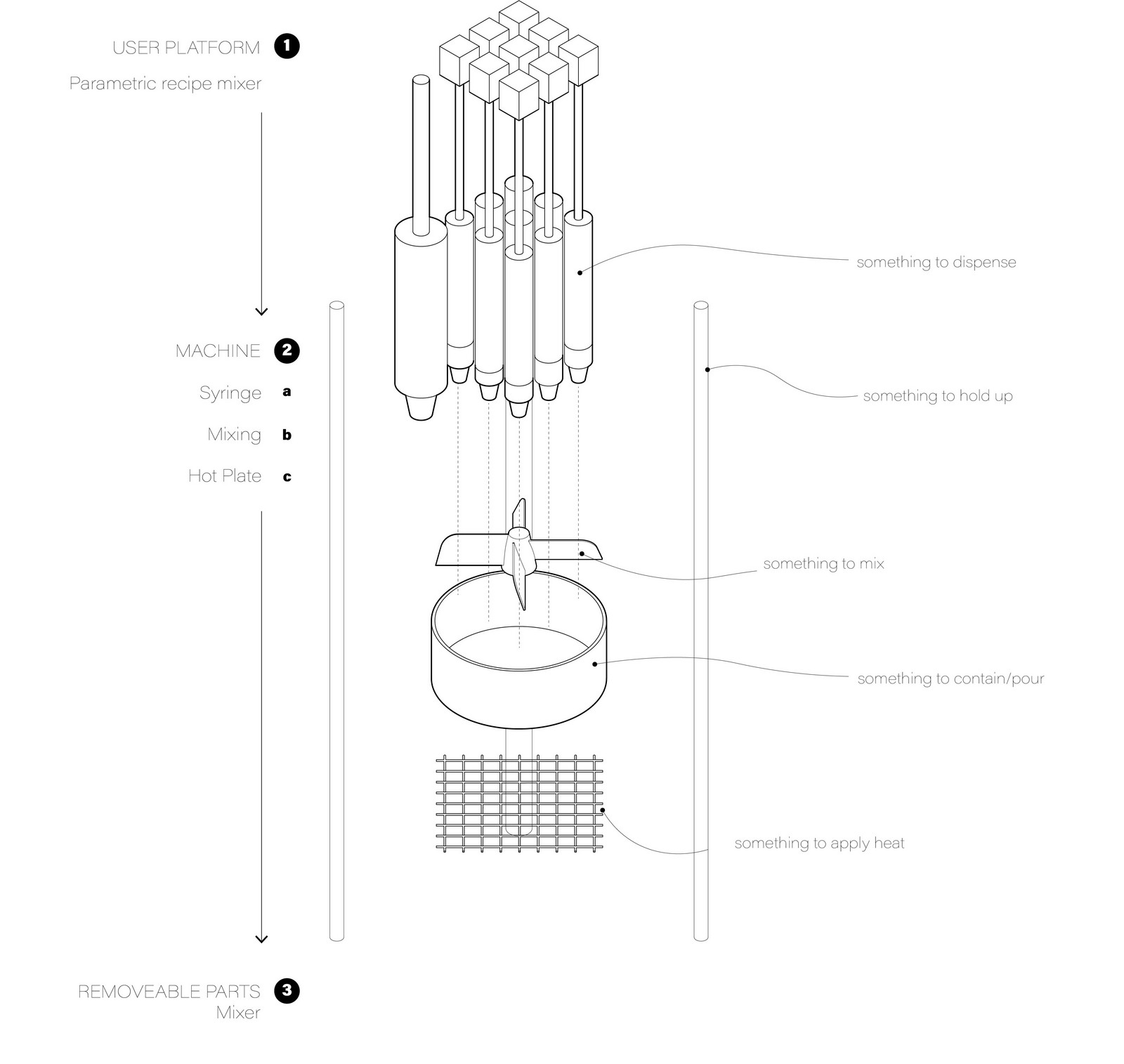
text ("The Desktop Material Mixer",325, 100); // ("text", x coordinate, y coordinate)
// making a subtitle
fill (35,31,32); //text colour (r,g,b)
textFont(font_Sub);
text ("INGREDIENTS" , 200, 240); // ("text", x , y )
}
// adding functions to controls
void Mix_this(){ // button sends current numbers to controller
//port.write(720);
println("sent");
float value = cp5.getController("SliderVal").getValue();
float value2 = cp5.getController("SliderVal2").getValue();
float value3 = cp5.getController("SliderVal3").getValue();
float value4 = cp5.getController("SliderVal4").getValue();
println(value);
println(value2);
println(value3);
println(value4);
int SendVal1 = int(value);
int SendVal2 = int(value2);
int SendVal3 = int(value3);
int SendVal4 = int(value4);
port.write(SendVal1);
port.write(SendVal2);
port.write(SendVal3);
port.write(SendVal4);
//println("Sent " + SendVal+" to Arduino");
}