Week 2 - Embedded Programming
# Embedded Programming
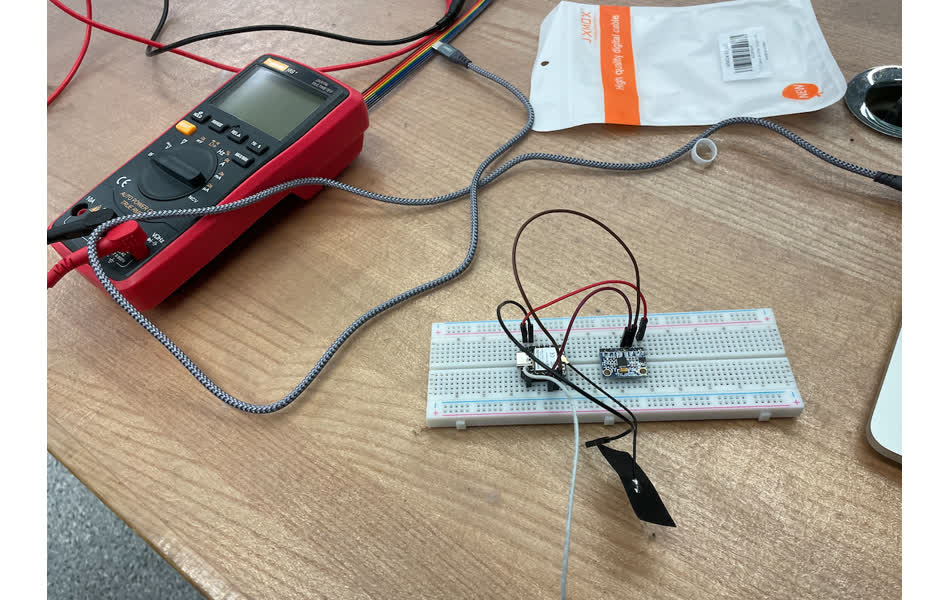
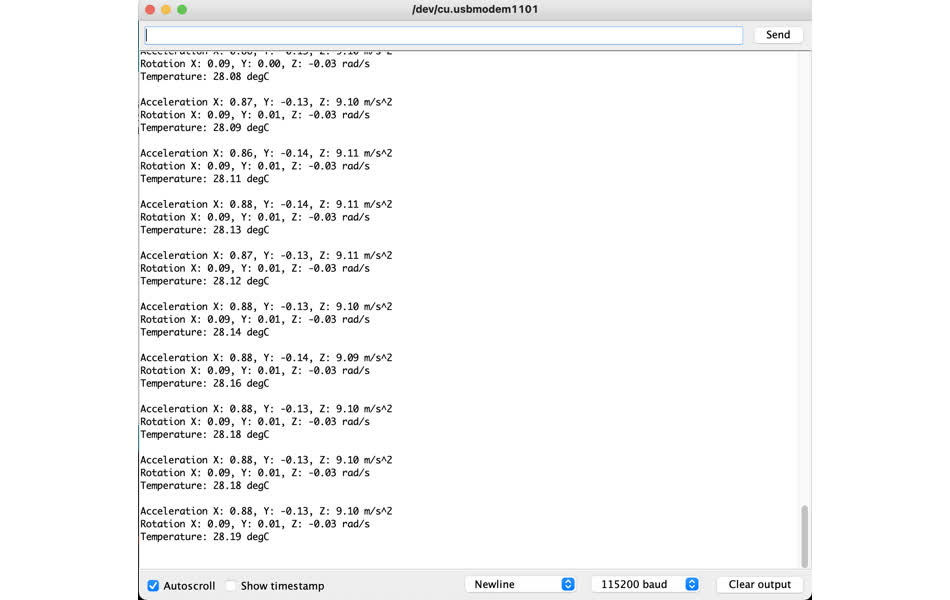
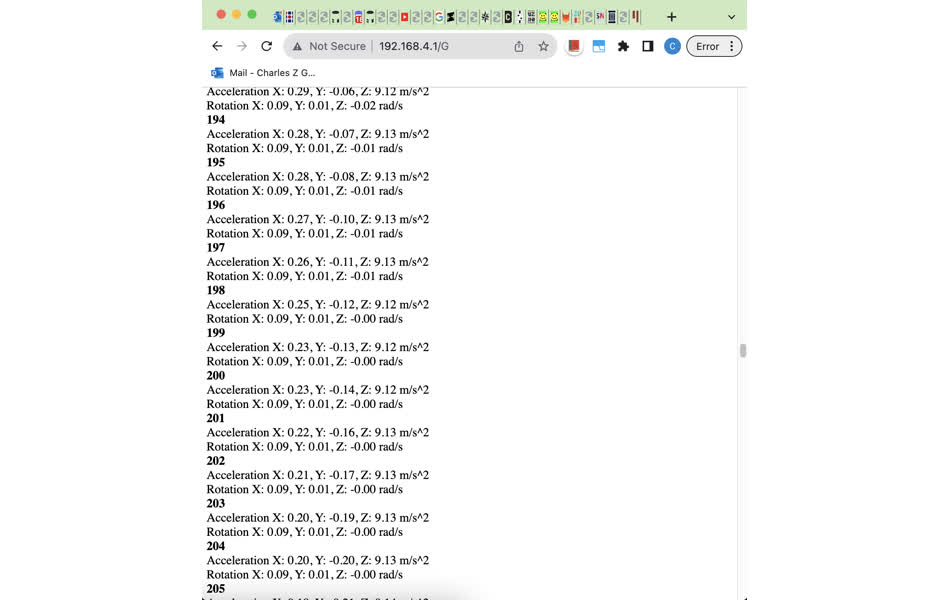
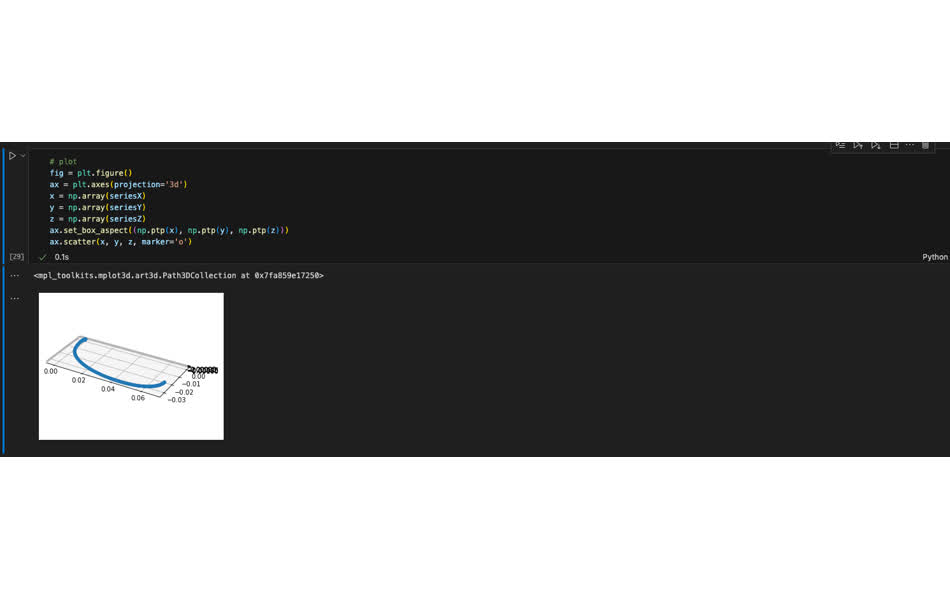
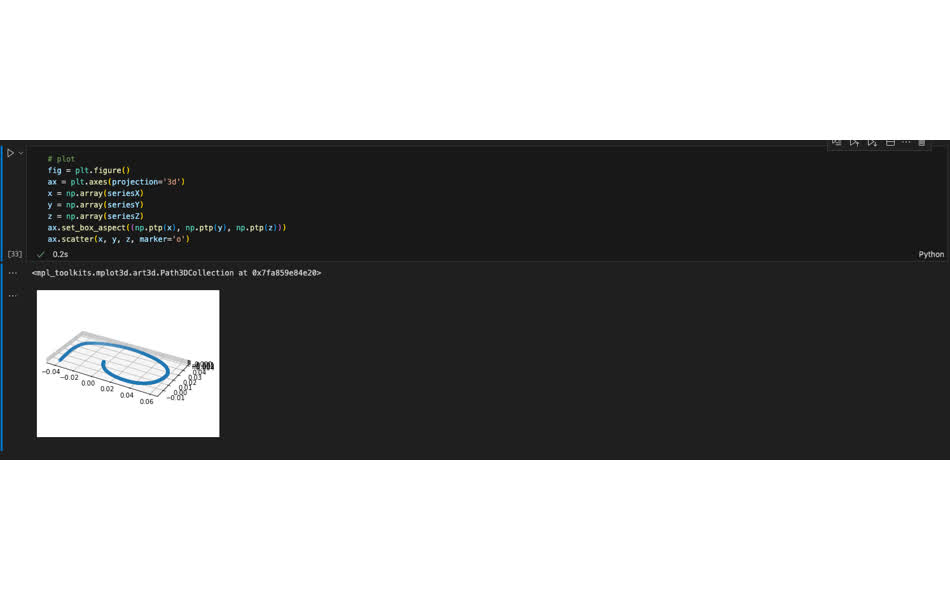
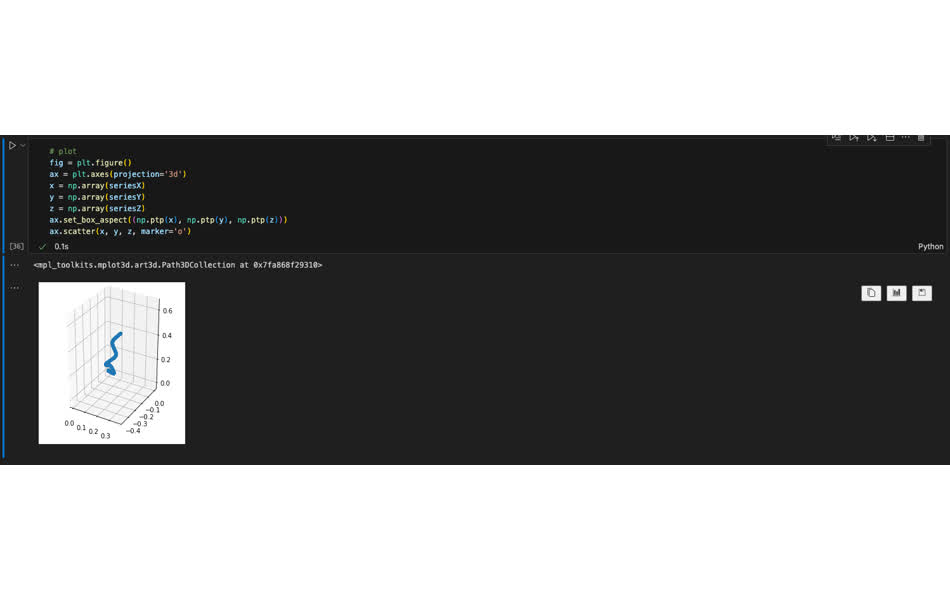
This week I experimented with the MPU6050 6-axis accelerometer and gyrometer. I used the Seeed ESP32-C3 board to communicate with my laptop over Wi-Fi. I used the Arduino IDE and coded in Arduino/C++. The current product allows me to log onto the server that the ESP32 creates when the program is running, initiate accelerometer data collection, and then retrieve that data. I then plotted a basic 3D visualization using pyplot from matplotlib in Python. The cumulative error and yaw drift stack up very quickly, so I plan on trying to mitigate those with a better algorithm, although I’m not sure how far I can get with the MPU.