Final Project Tracker
Please take a look here, to see the final system.
--------------------------------------------------------------------------
System: Minimal deployable machine
I have been quite interested in tape-springs (see links below). I think it could be interesting to use them to build a very light-weight deployable machine (e.g. no extrusions, just three 'end-blocks', each with an extendable (tape) actuator, meeting in the middle to support a tool of some sort).
Ideally, the individual modules might be robotic/self-assembling ...
Compliant/deployable actuators:
tape-springs (link, link, link, paper, Pellegrino lab).
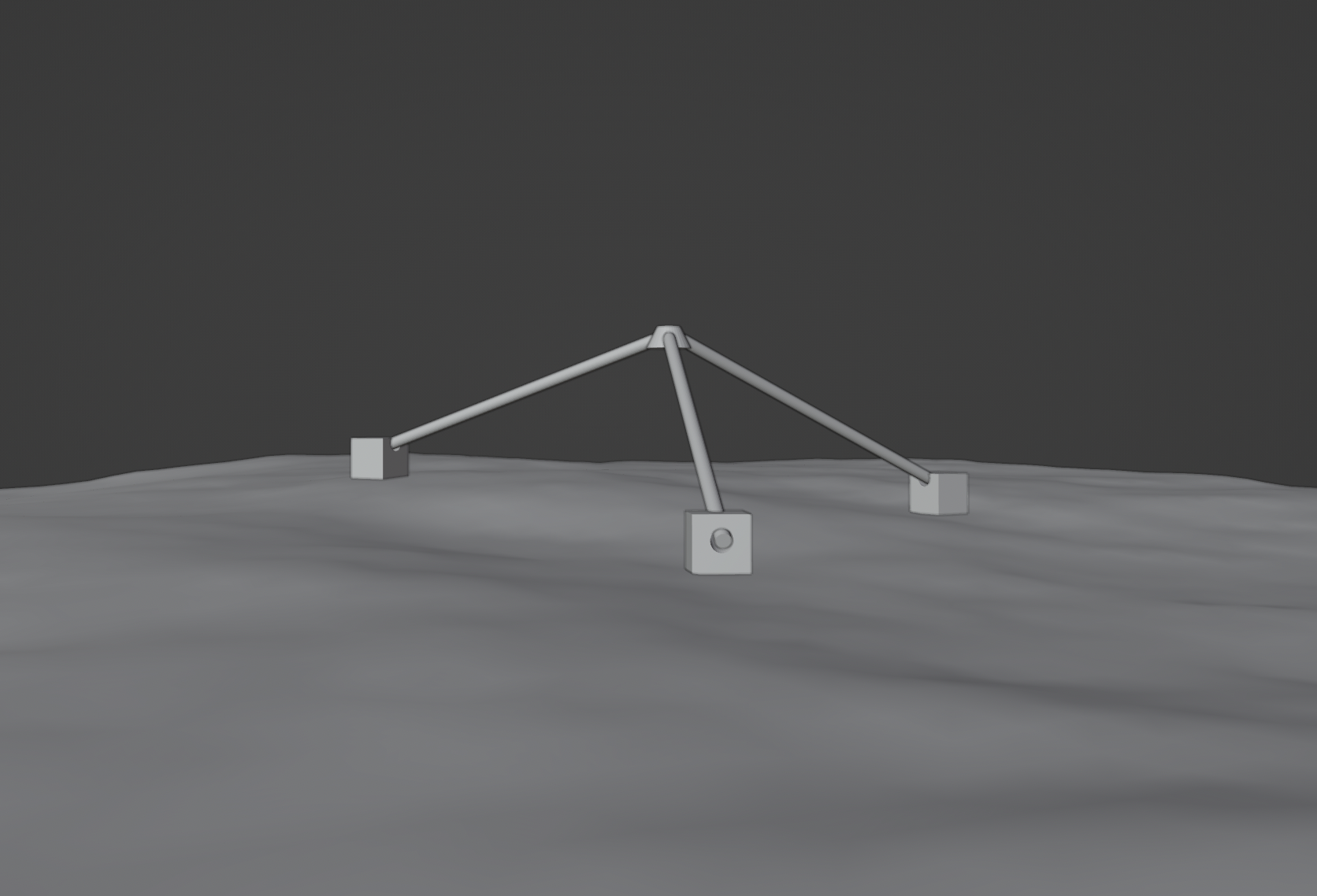 Sketch ~ three modules with extended actuators supporting a floating toolhead at the center.
Sketch ~ three modules with extended actuators supporting a floating toolhead at the center.
 2D version to simplify things ...
2D version to simplify things ...
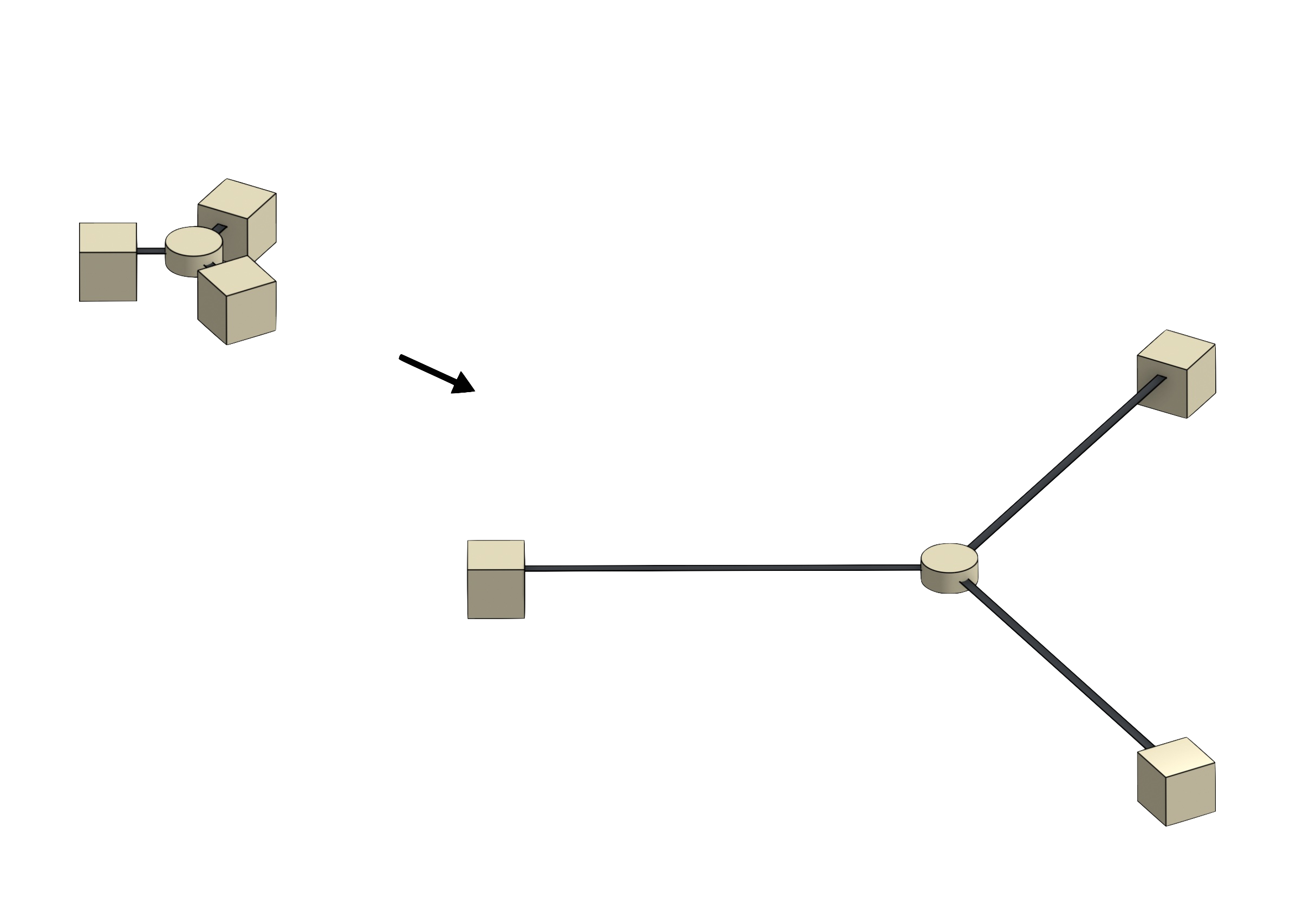 Collapsed vs expanded actuators in a 2D configuration.
Collapsed vs expanded actuators in a 2D configuration.
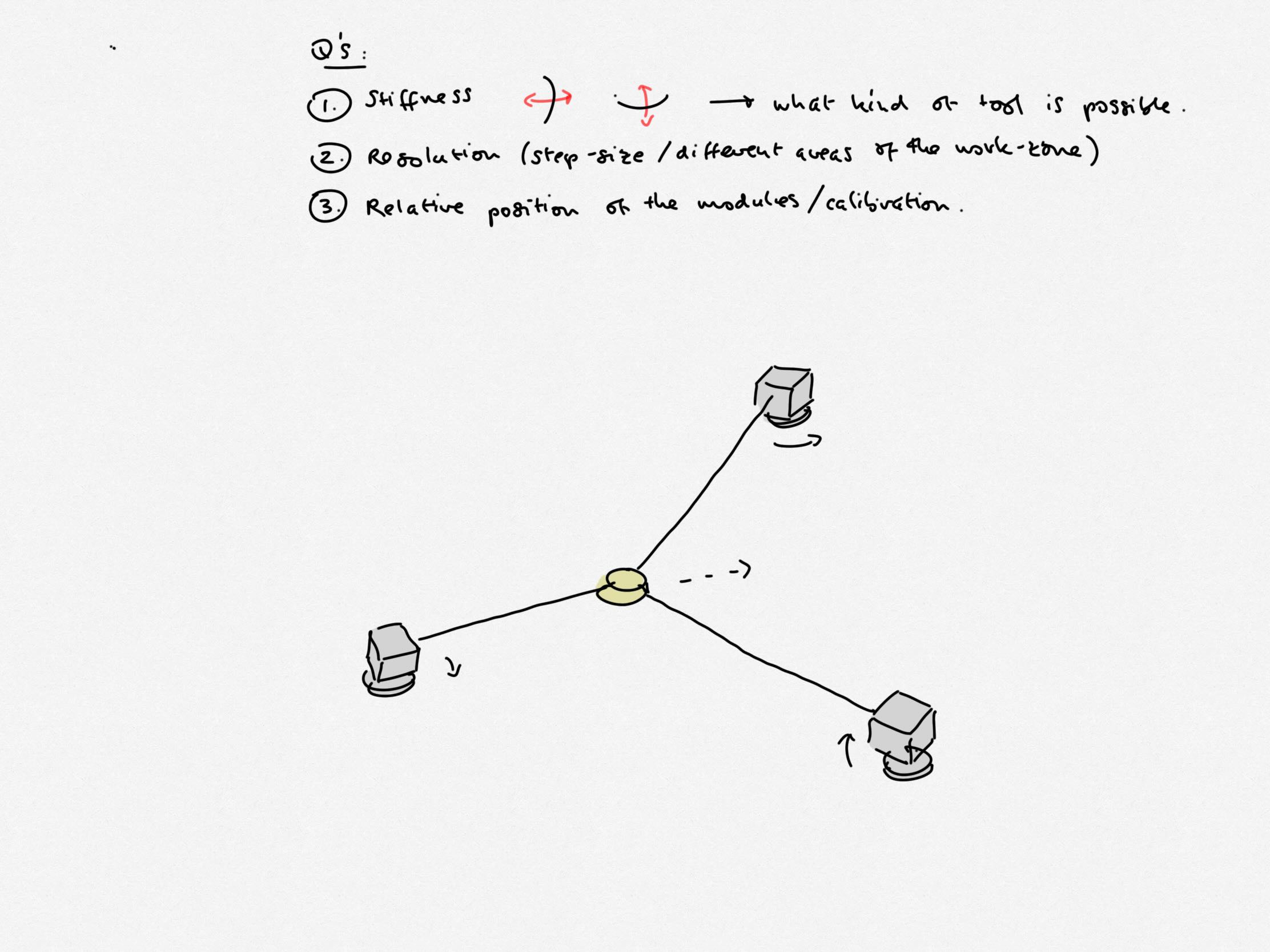
Questions:
(a) anchoring, blocks need to anchor themselves ~ e.g. screw themselves into the ground
(b) stiffness of the extendable actuators and system ~ what kind of processes would this allow (and at what resolution)? e.g. piling things, pick-and-place, others? Also, what kind of application is interesting, in the context of deployability/unstructured environments.
(d) do I want to focus on making a good actuator for the tape-springs for now?
Component 1: actuator design
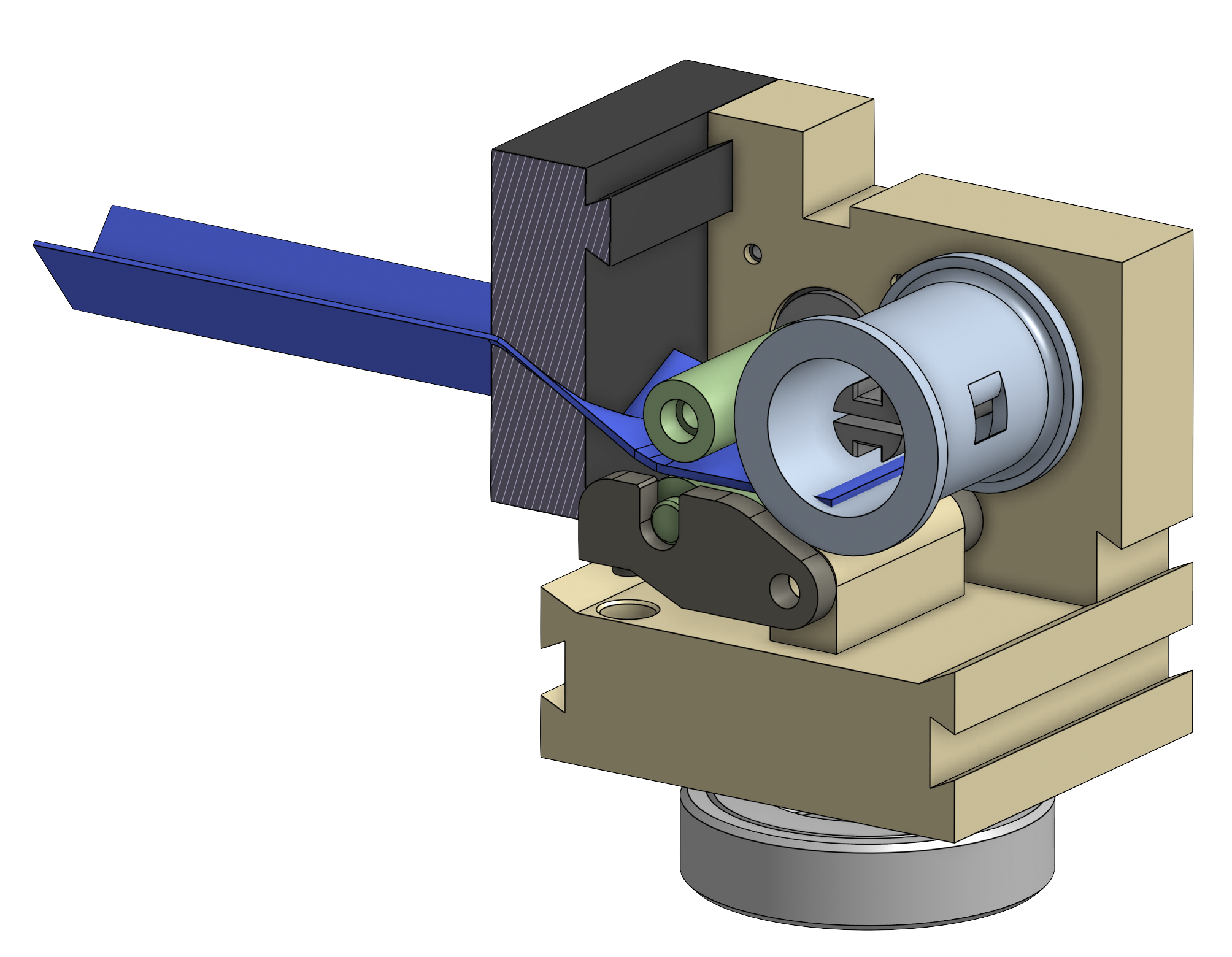
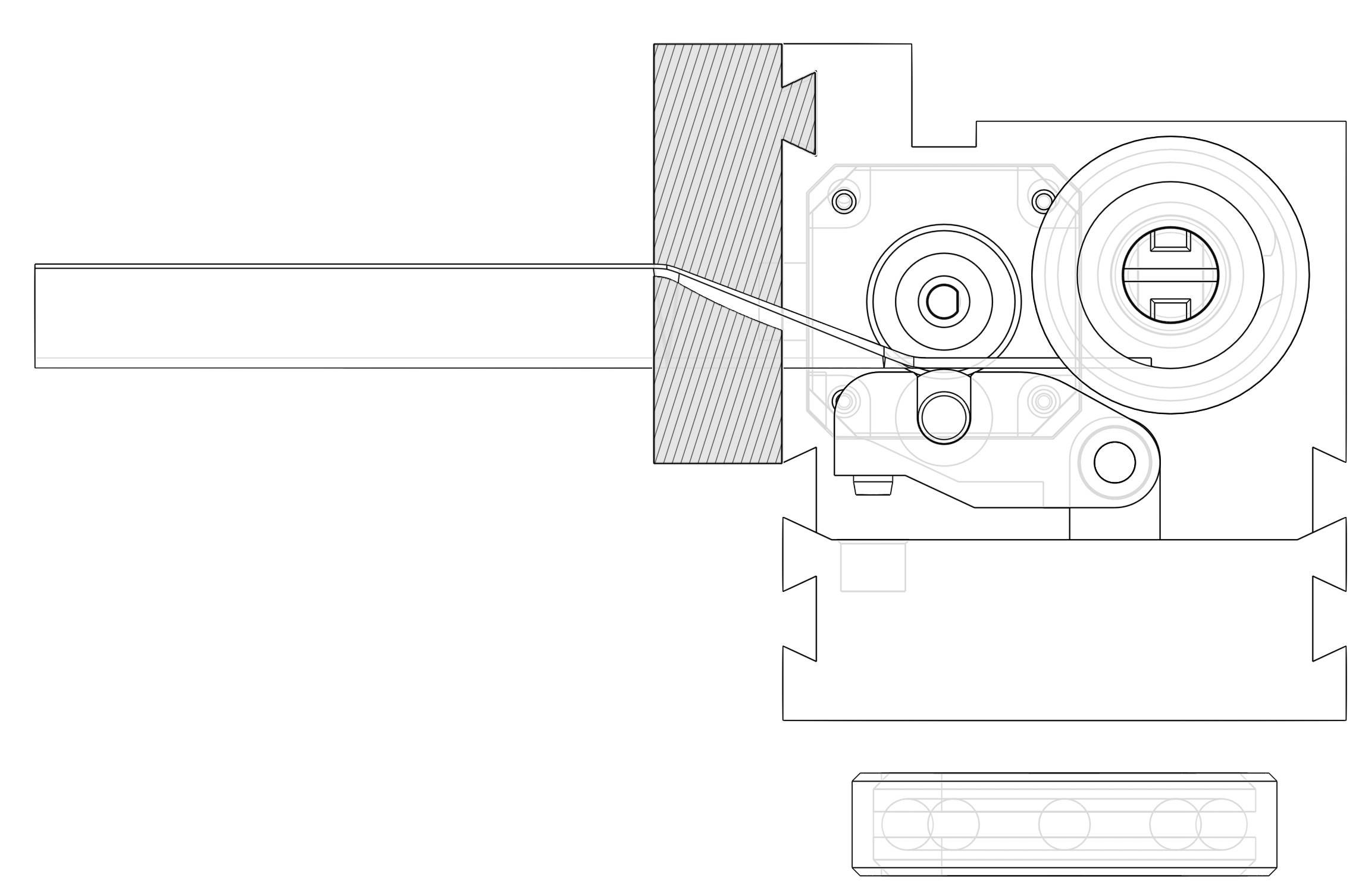
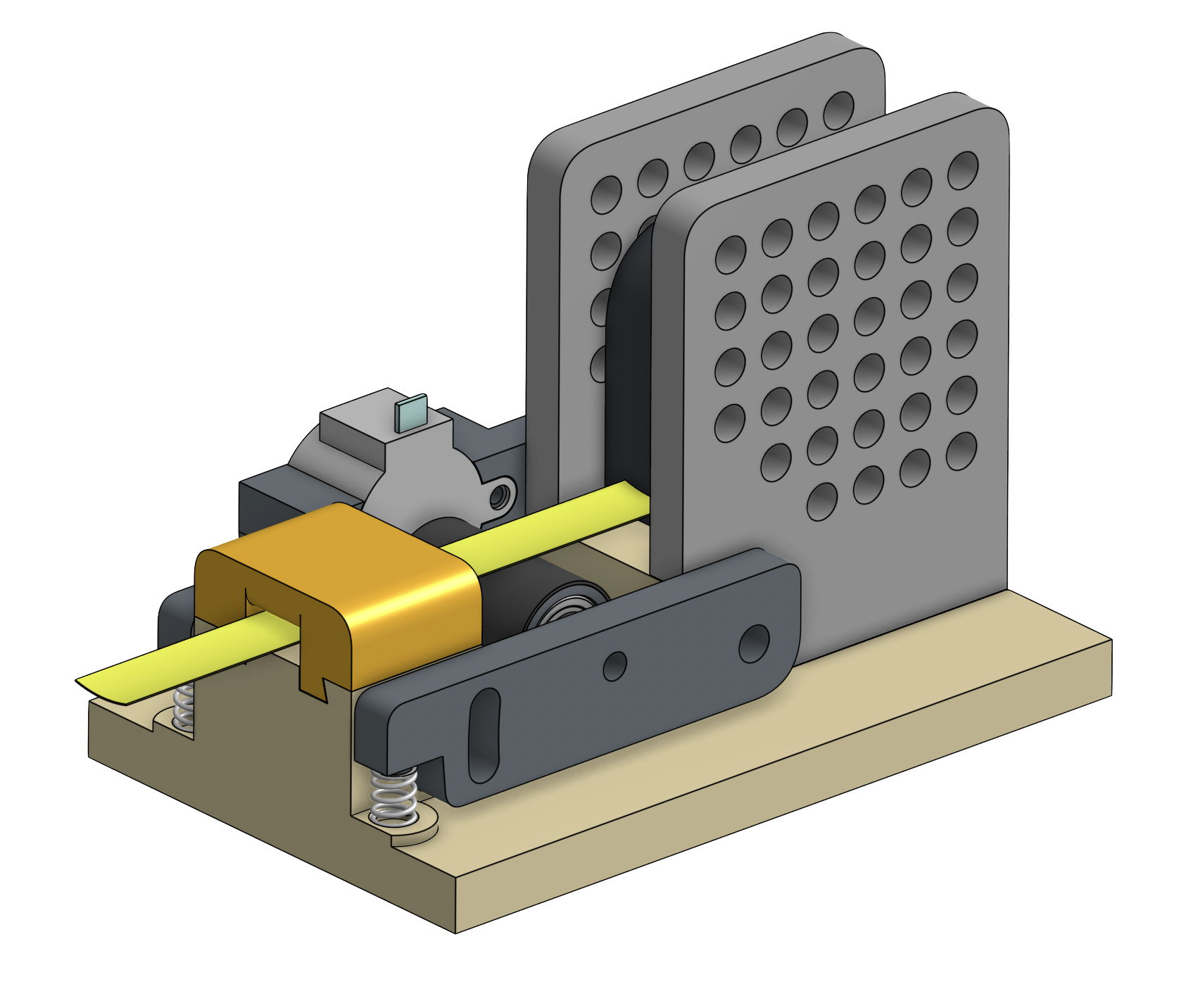 Initial CAD ~ a motorised tape measure (could also be used to actuate other 'rollable' things - e.g. rods?)
Initial CAD ~ a motorised tape measure (could also be used to actuate other 'rollable' things - e.g. rods?)
Some things to consider: how to put pressure/release pressure on the tape when it is actuated vs being driven by other actuators, e.g. do we need 1 motor + 1 solenoid?
Or choose a motor based on good brake/holding torque?
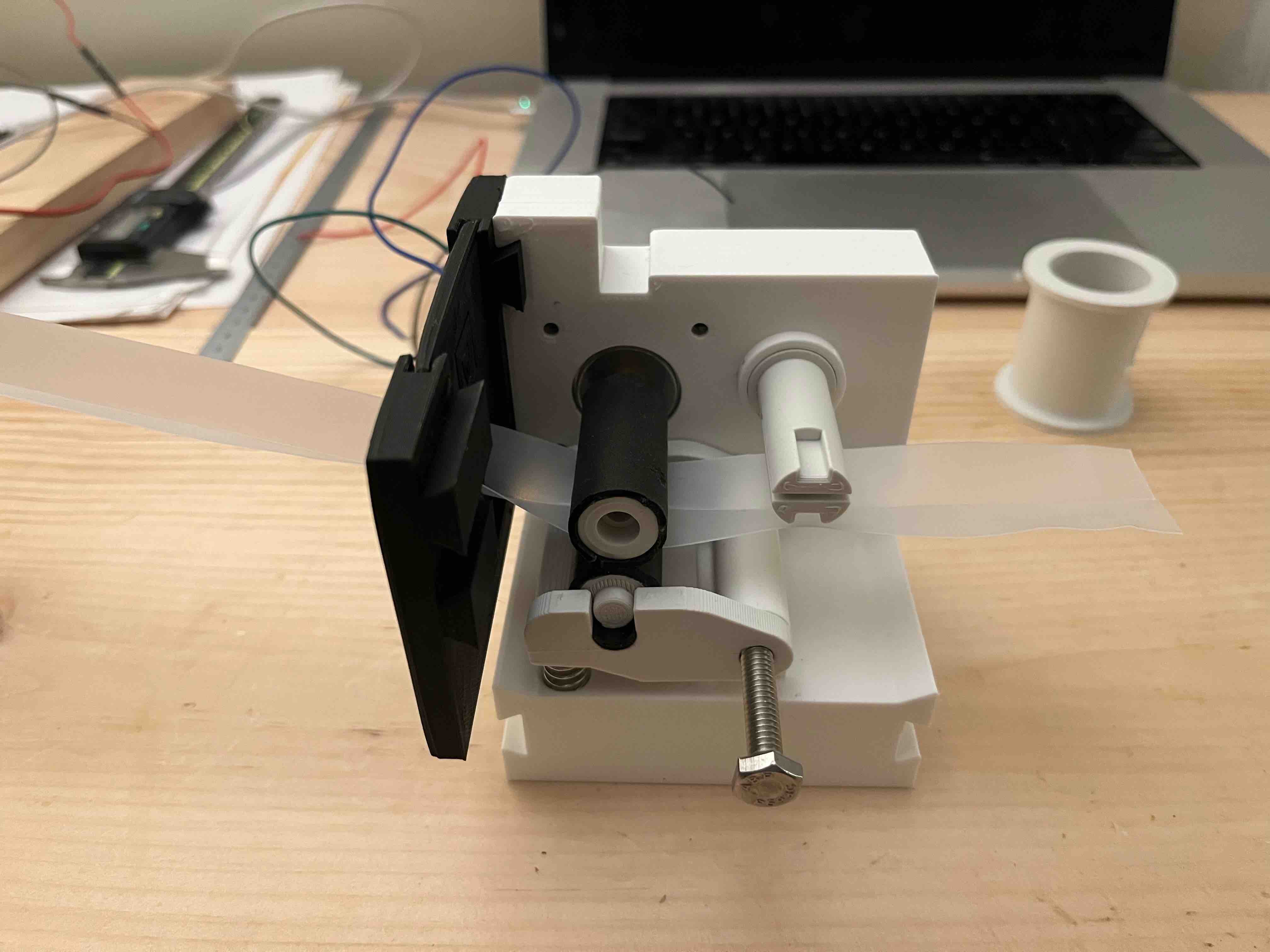
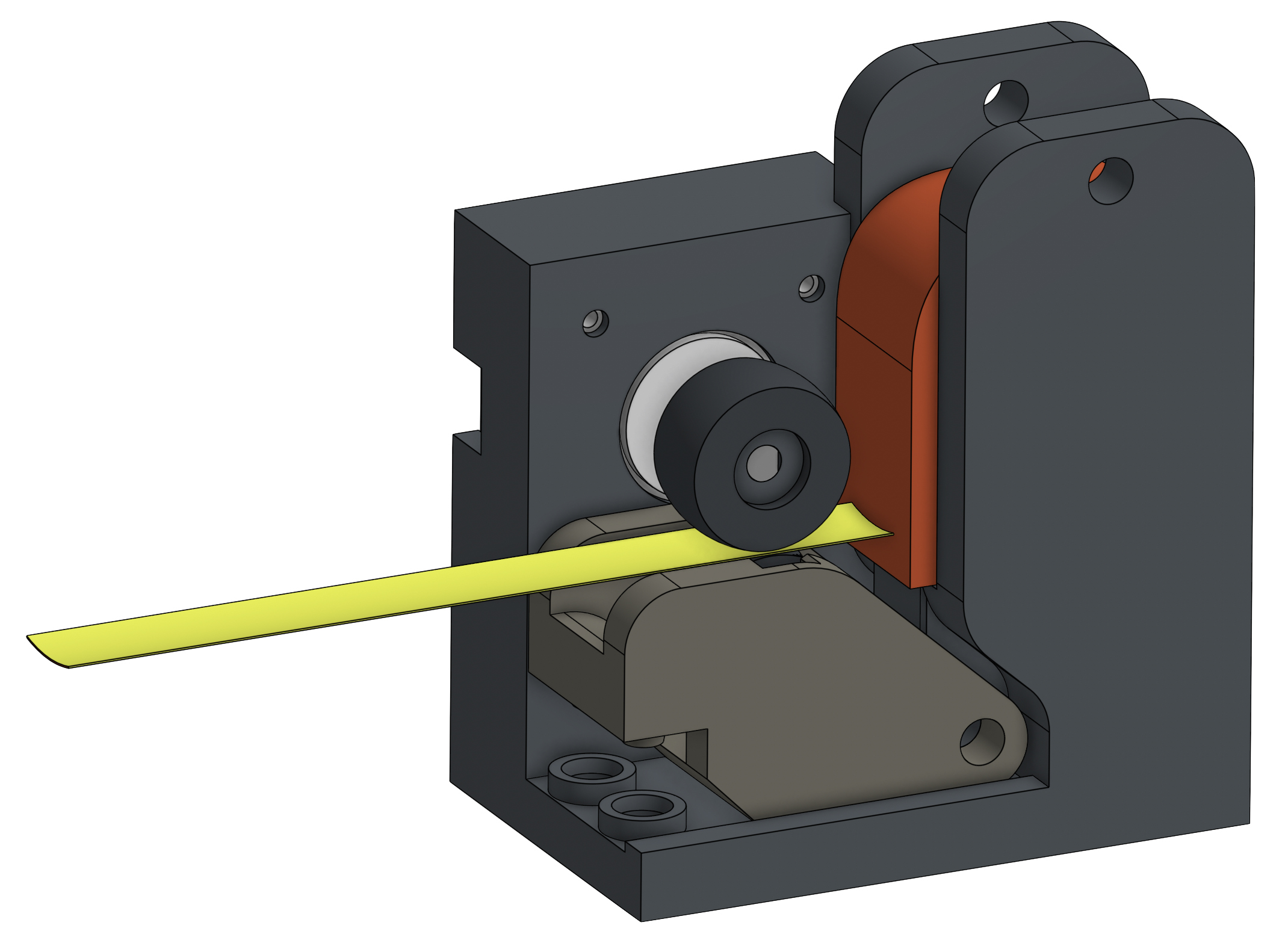 Updated CAD ~ prototype v1.
Tape actuator v1 tests
Tape actuator v1 tests, extension and retraction
Tapes assembling (CAD for prototype v2)
Updated CAD ~ prototype v1.
Tape actuator v1 tests
Tape actuator v1 tests, extension and retraction
Tapes assembling (CAD for prototype v2)
Reference, Vineet mentioned Jeff Hoffman's group's project on deployable towers for the moon,
also here.
This in the reference list: link.
Thoughts for encoders/motion feedback:
- Optical flow-sensors (e.g. like in an optical mouse?)
- Could I hack an optical mouse? (link); (link);
link -> googled this chip Github;
and got to this link (already 12 years ago!);
also more recent projects that have used this sensor though, link
Questions for programming:
- .gcode for abritrary (uneven) delta set-up?
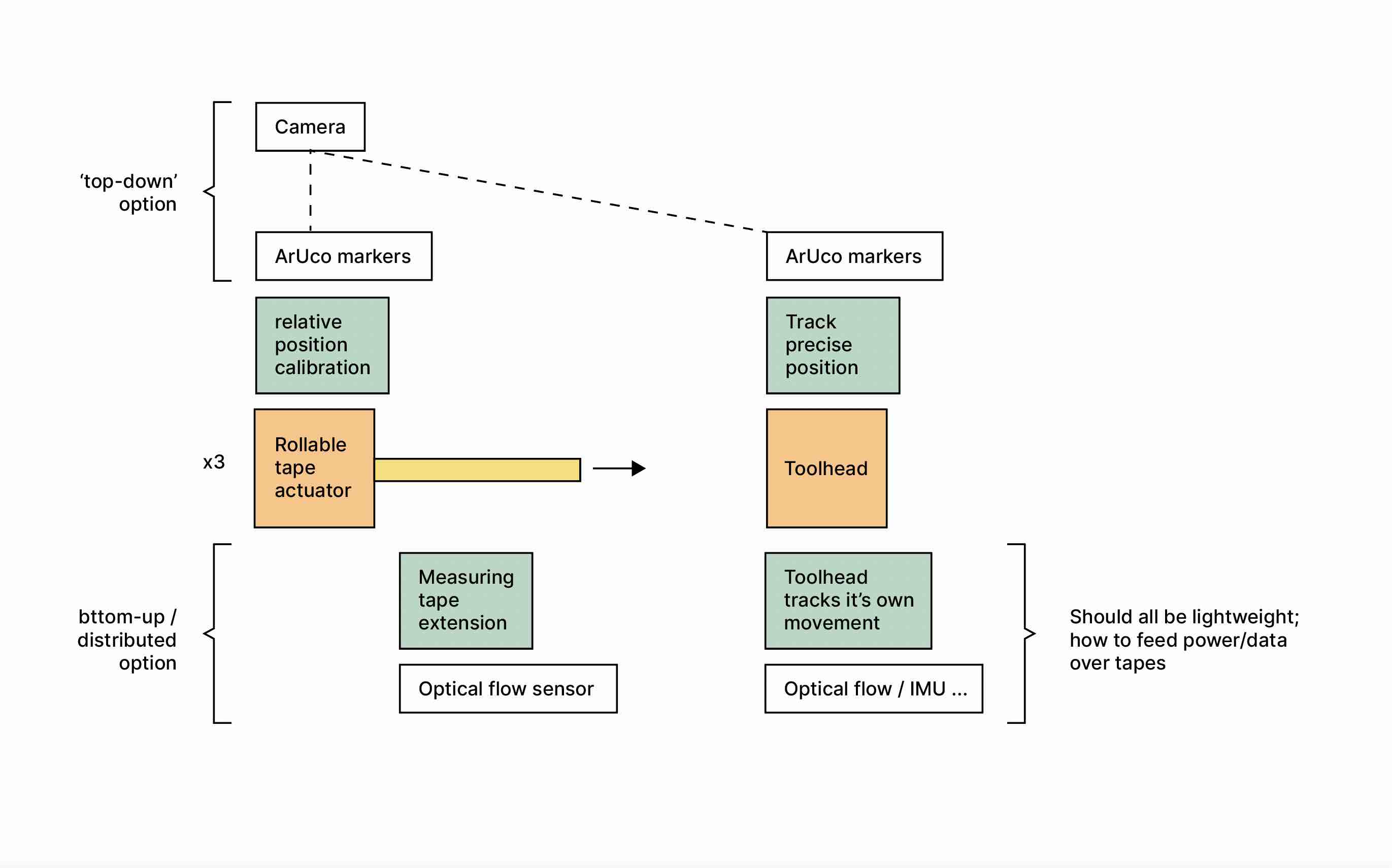 System overview - questions on position feedback and how to accurately track the position of the toolhead (most likely a simple passive pen-plotter to start with).
System overview - questions on position feedback and how to accurately track the position of the toolhead (most likely a simple passive pen-plotter to start with).
Position feedback:
Exploring the optical sensor via old computer mice harvesting ... I took apart a bunch of mice. The two nicest (= simplest / easiest to disassemble) ones I found also seemed to work off sensors that looked the closest to the Arduino-examples I had found online (the MCS-12085 sensor).
The chip inscriptions were different however: "OM50ND" and "LJFD3180C". I tried to reverse engineer/sketch out the circuit from the Inland mouuse I had taken apart, and it looked like the pins for the 0M50ND mapped out similarly to the mcs-12085.

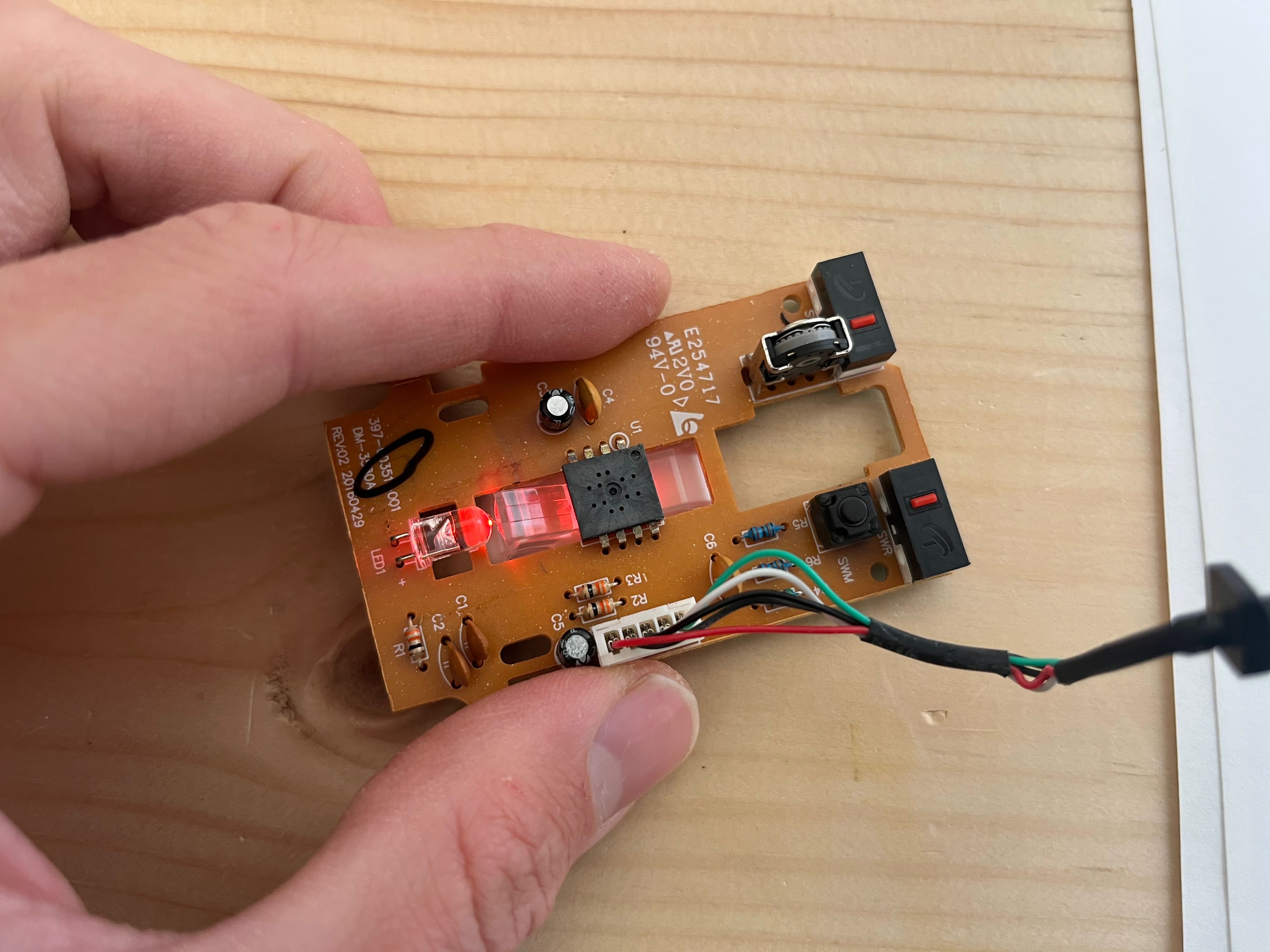
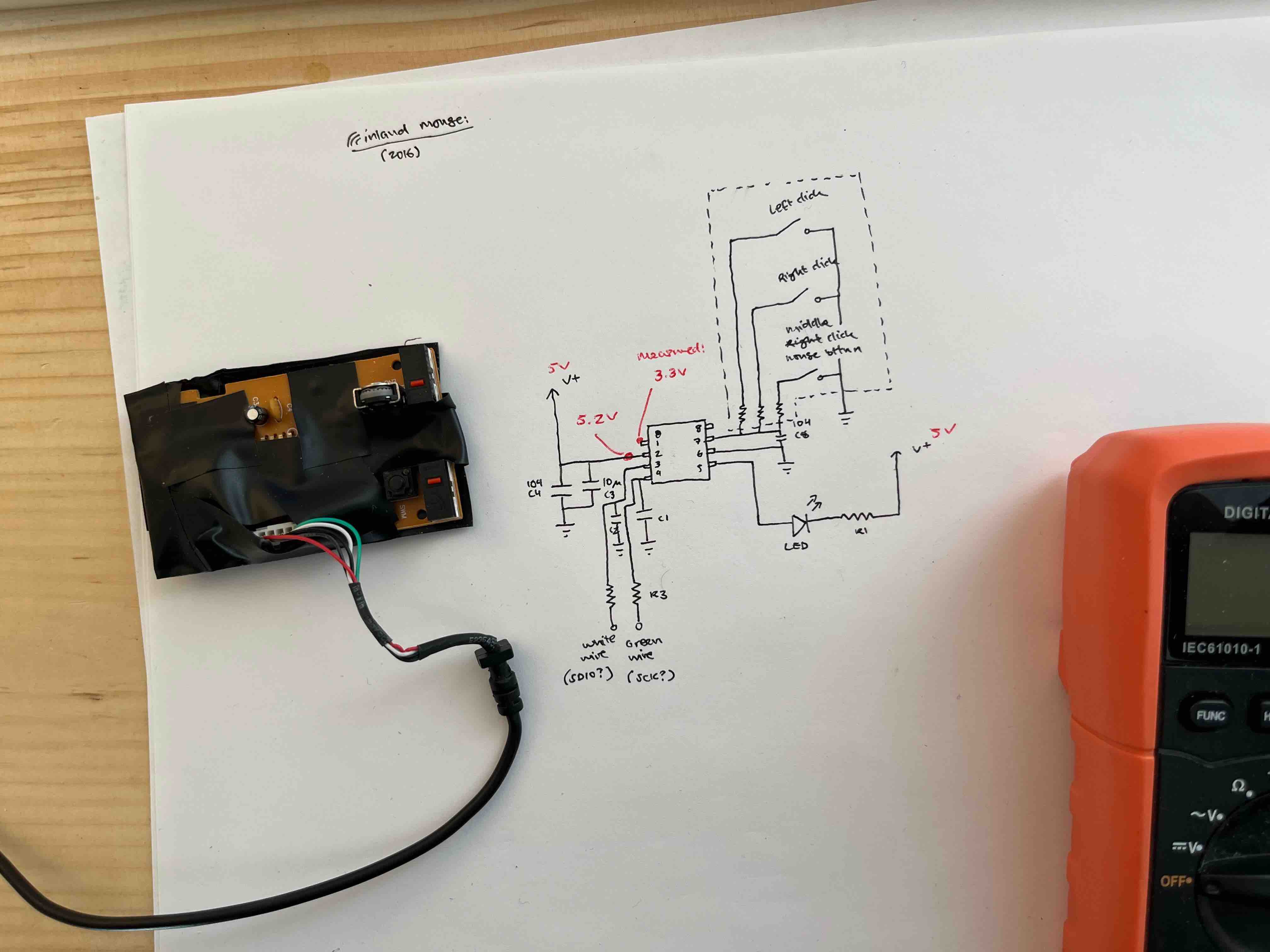 Inland mouse circuit, taped up and circuit sketch.
Testing the sensor on the tape.
Inland mouse circuit, taped up and circuit sketch.
Testing the sensor on the tape.
Adding a swivel base:
The torsional stiffness of these tapes will not be great, so I think I will need good bearings to allow the actuators to swivel easily/follow the path of the tool-head.
Bearing swivel test (part of a motor I found, but will replace with e.g.)
Test: custom deployable tape
Exploring boom cross-sections/inter-locking booms; internals of tape.
Testing a custom folded plastic 'boom'.
Redesign: spool for custom folded tape
 Redesign in CAD: wider rollers to allow custom tapes, and a custom spool.
Redesign in CAD: wider rollers to allow custom tapes, and a custom spool.
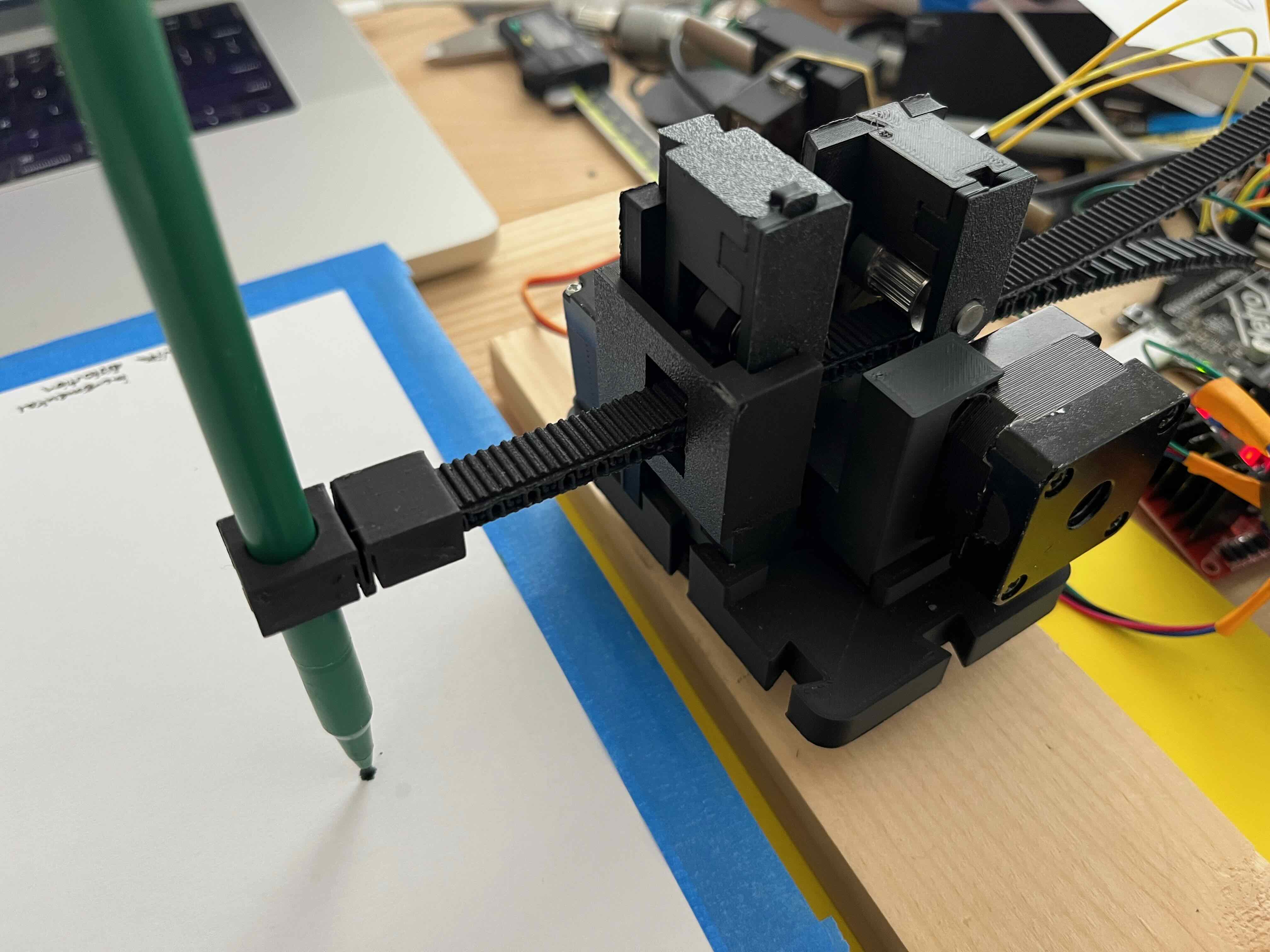
New design prototype
 New design; tape folded through triangle extrusion; sliding of the tape.
Motor extension and retraction tests; friction/vibration issues.
New design; tape folded through triangle extrusion; sliding of the tape.
Motor extension and retraction tests; friction/vibration issues.
Changing track: zippers!
Unsatisfied by the torsional stiffness of the tape prototypes and returning to some experiments into velcro-like surfaces
during the fall class of HTMAA,
I decided to explore zipper-inspired mechanisms as an alternative. While less known than other linear actuators, there are plenty of
precedents for chain and zipper-like actuators with impressive applications (e.g. to raise theater stages/other platforms - zipper-chain, single-chain version,
plastic version). However, I have not seen examples of these kind of actuators being used
to ceeate compact personal fabrication/desktop machines.
First test using custom 3D-printed zipper design.

 Early velcro/zipper tests - multiple designs were explored, eventually serttling on a compliant bristle-like design.
Early velcro/zipper tests - multiple designs were explored, eventually serttling on a compliant bristle-like design.
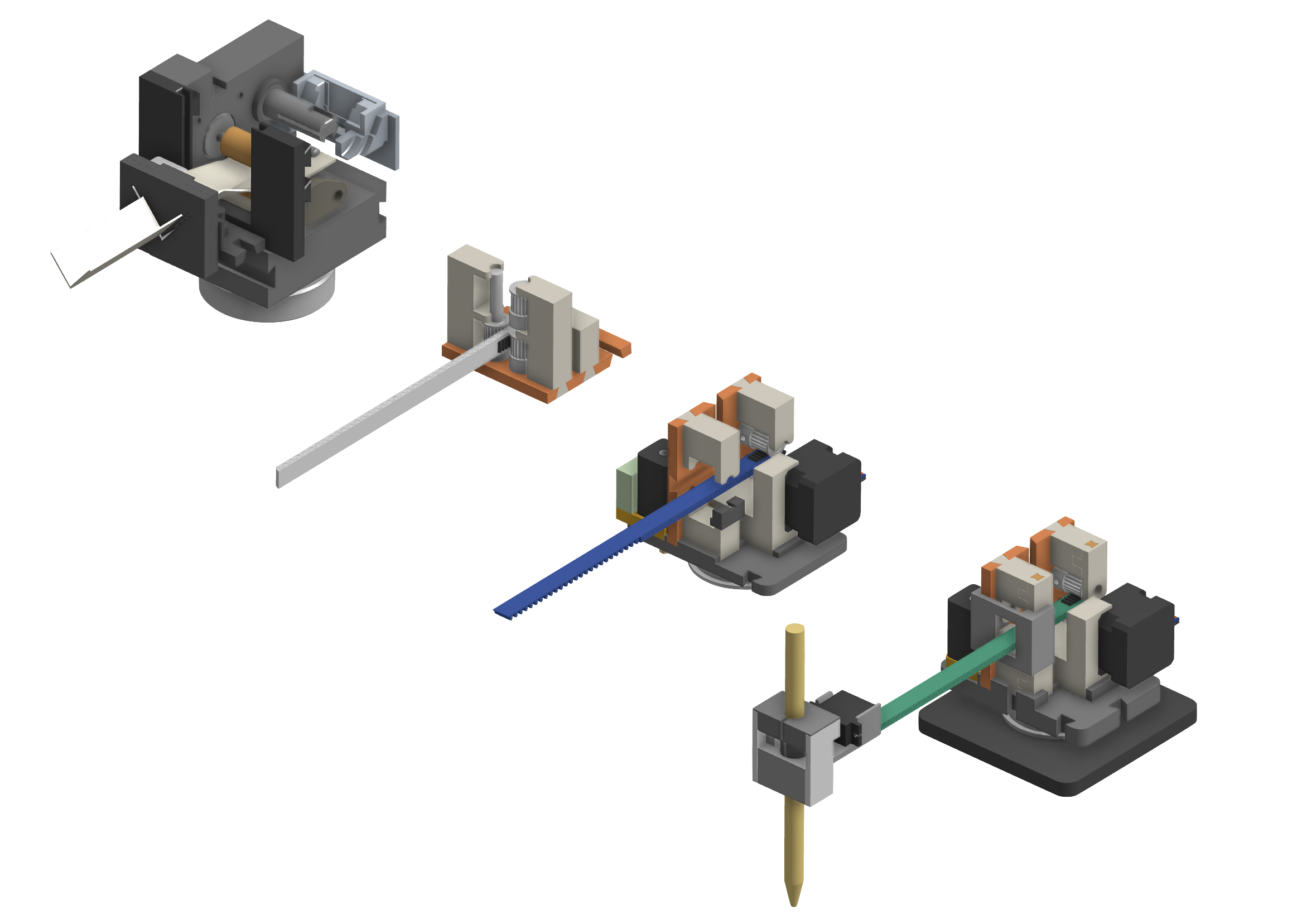 CAD iterations exploring custom tapes and zippers.
CAD iterations exploring custom tapes and zippers.
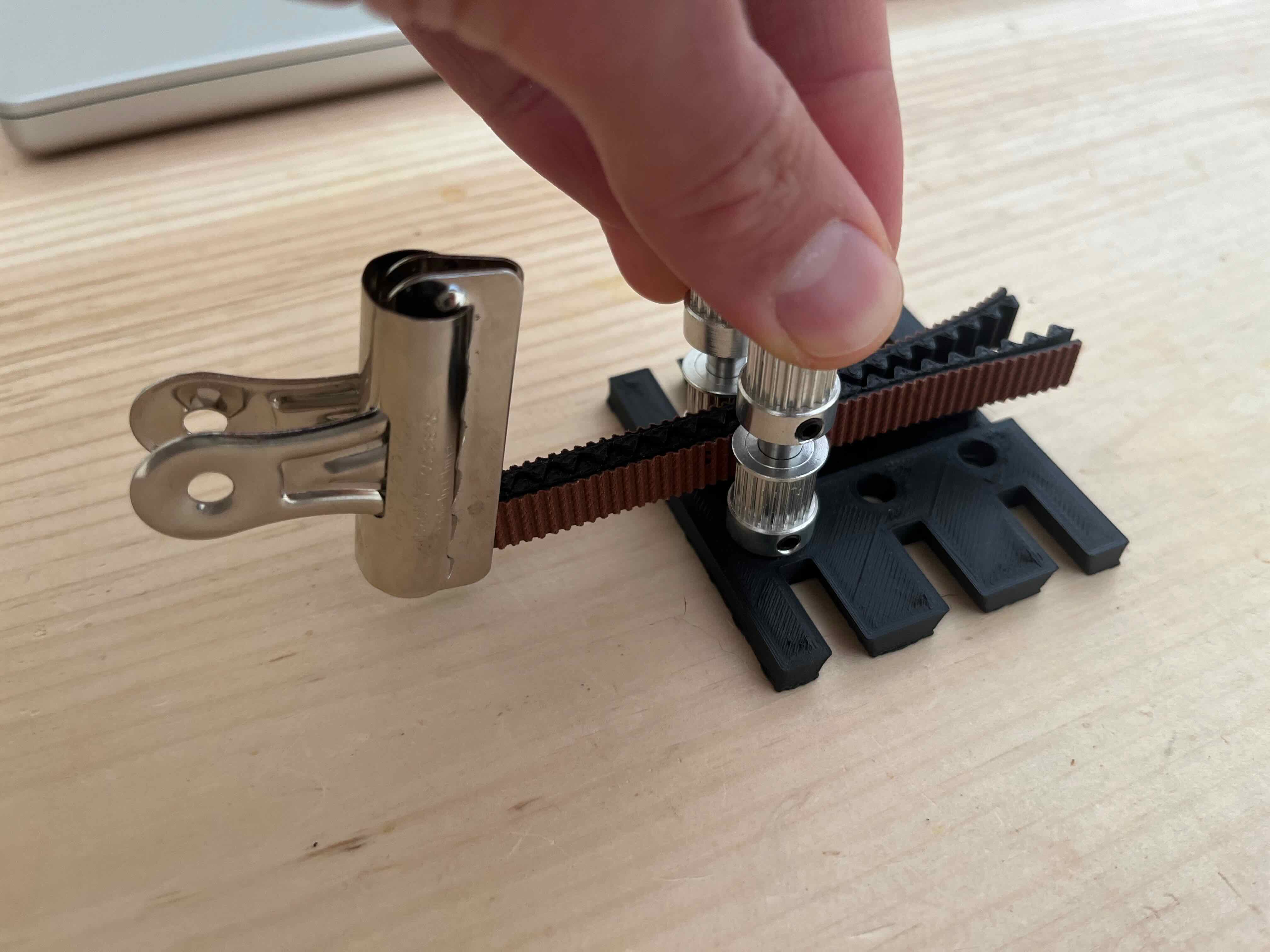
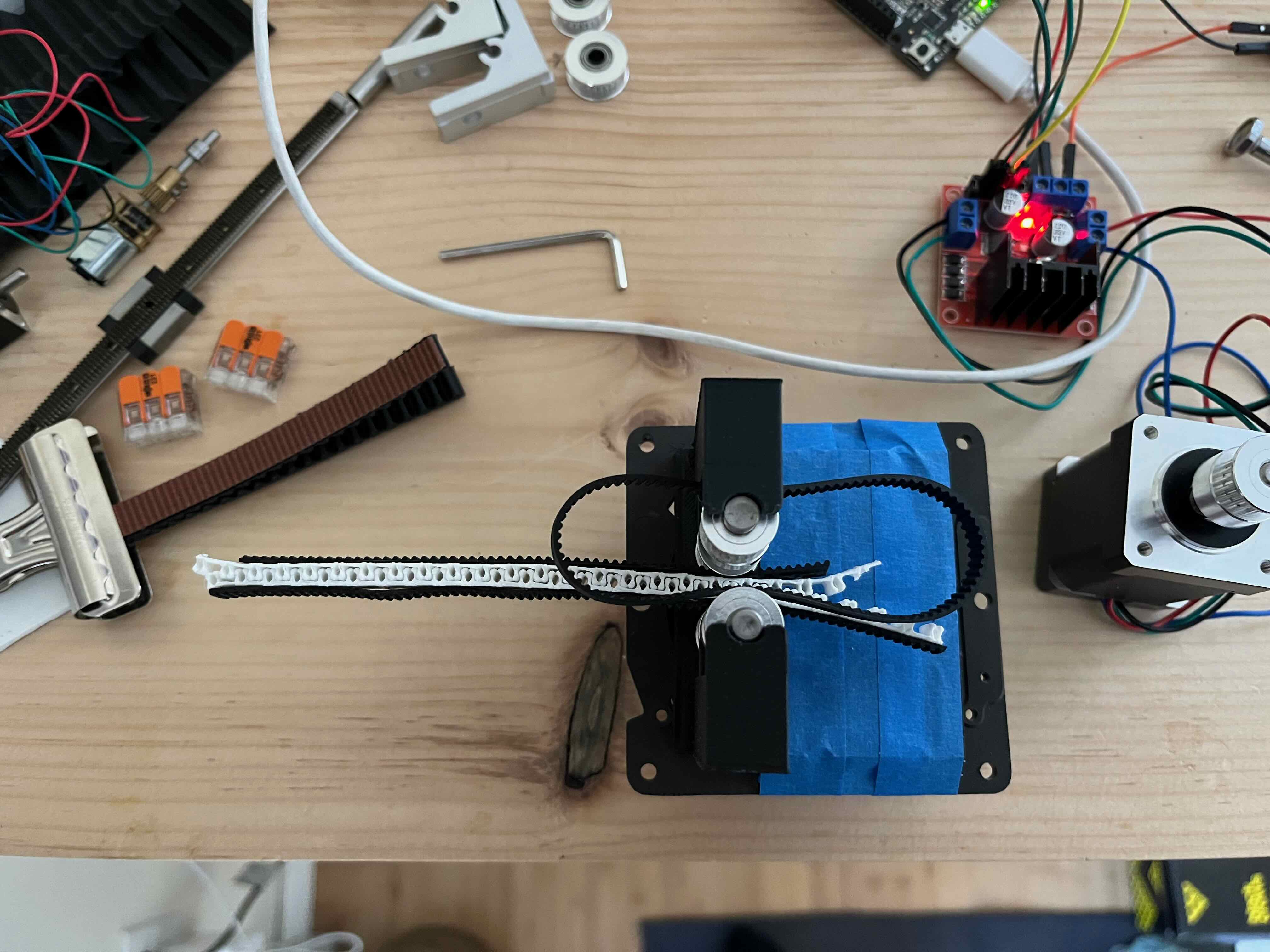
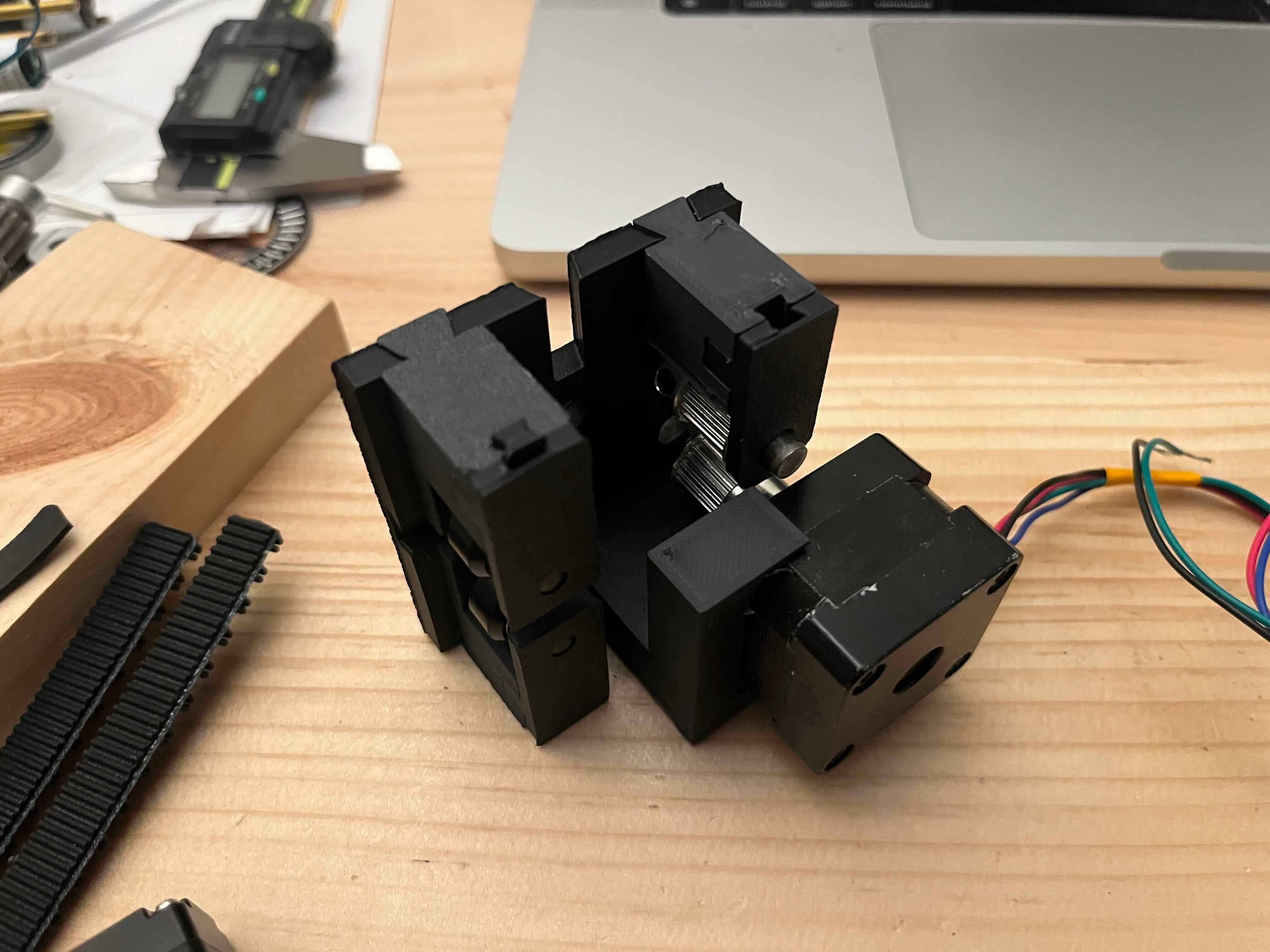 Modular prototyping of the zipper actuator with pulleys to push the zippers together and rollers to guide the extension of the zipepr as it leaves the actuator.
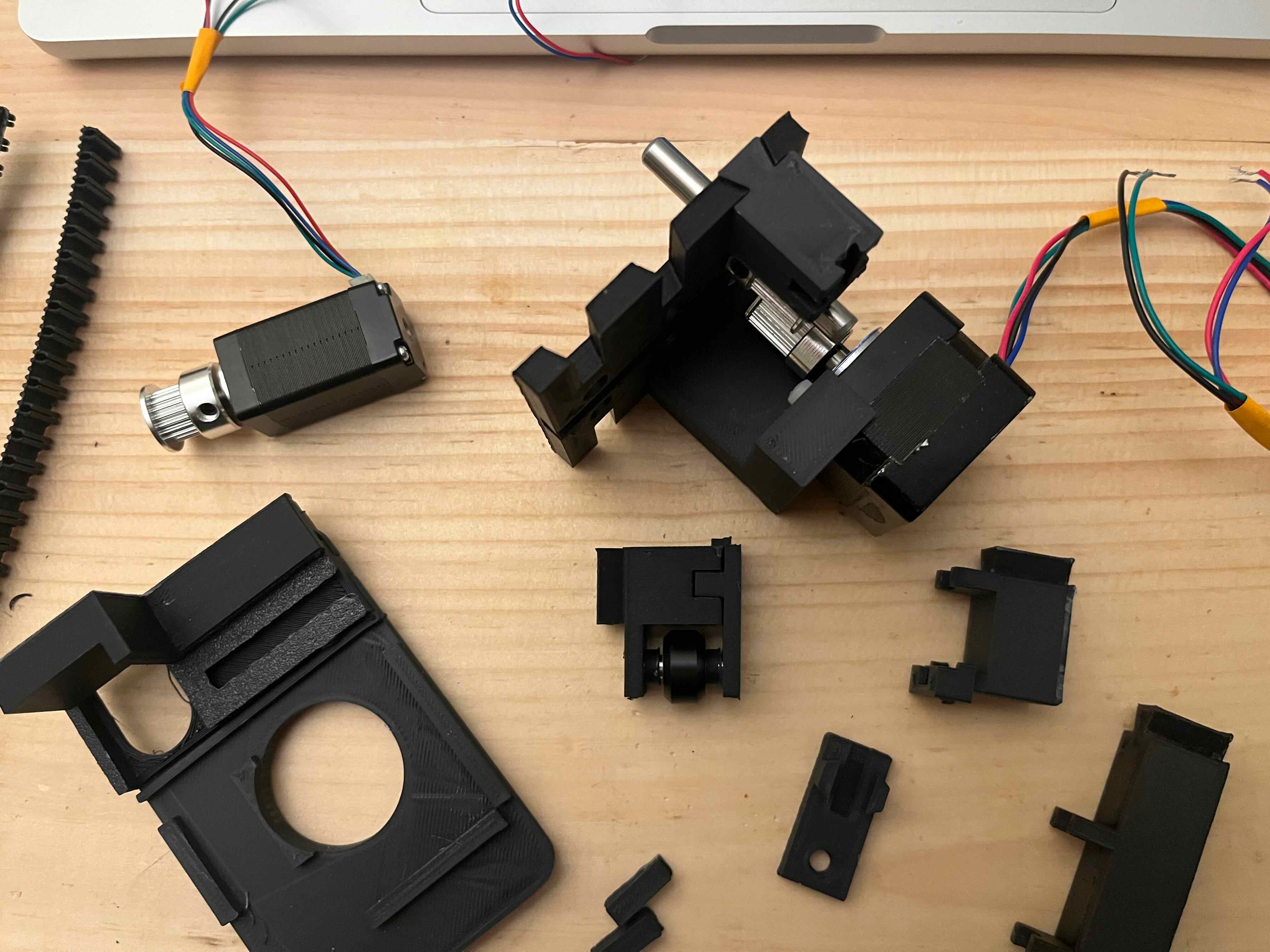
Testing the rotary base assembly using the 40mm i.D. ball bearing I picked up from Jake. I added extra dovetail features to allow for future alterations without needing to reprint the whole part.
Modular prototyping of the zipper actuator with pulleys to push the zippers together and rollers to guide the extension of the zipepr as it leaves the actuator.
Testing the rotary base assembly using the 40mm i.D. ball bearing I picked up from Jake. I added extra dovetail features to allow for future alterations without needing to reprint the whole part.