System: single-arm retractable plotter
To demo the capabilities of my deployable zipper actuator, I developed a one-armed pen plotter. For notes on the prototyping/development process, see here.
Plotter test with a simple flexure-based pen-holder. The drawings were highly repeatable, although not really the 'circle' that had been expected.
Plotter test with a servo-actuated pen (see Components section for details).
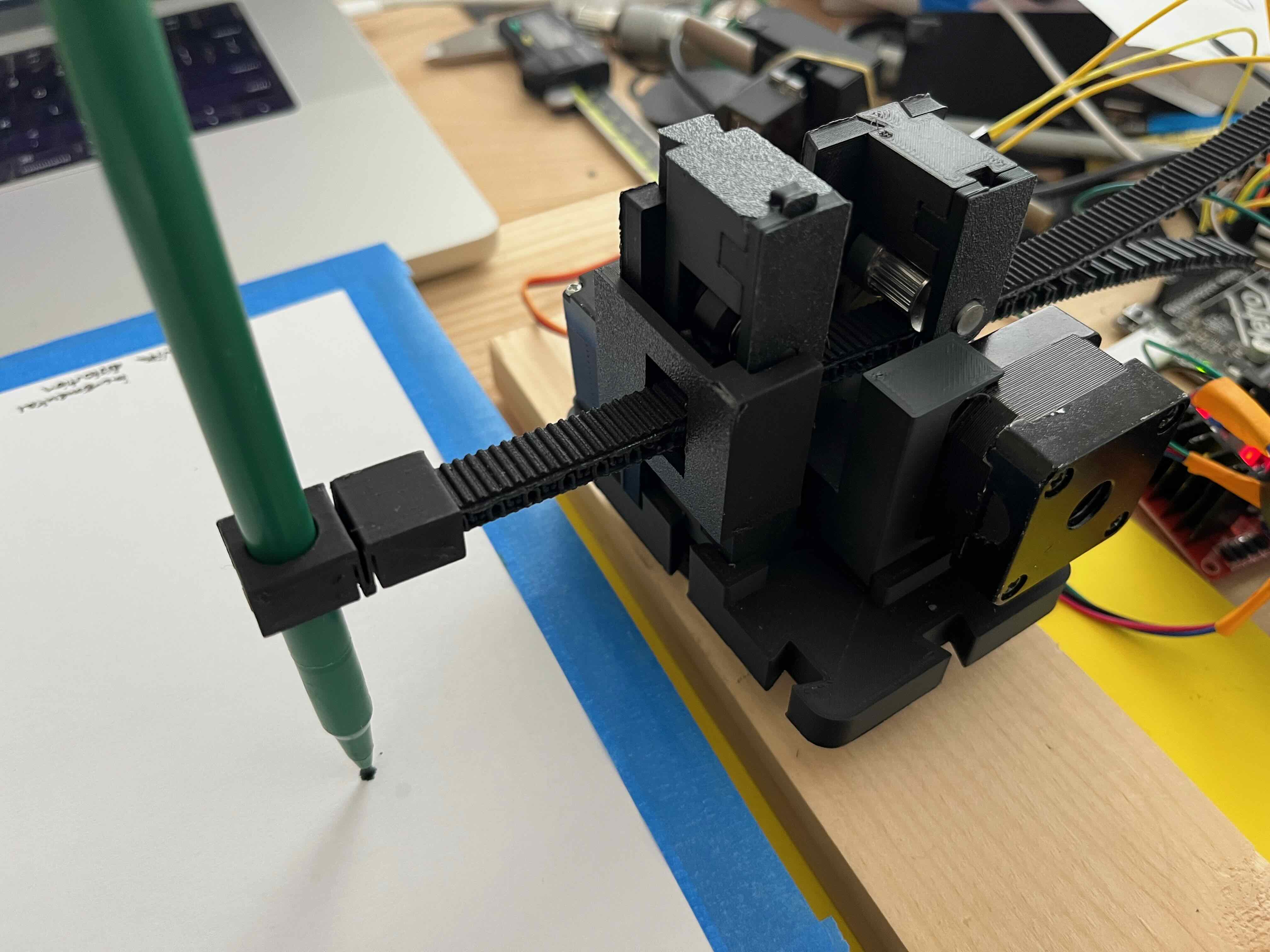
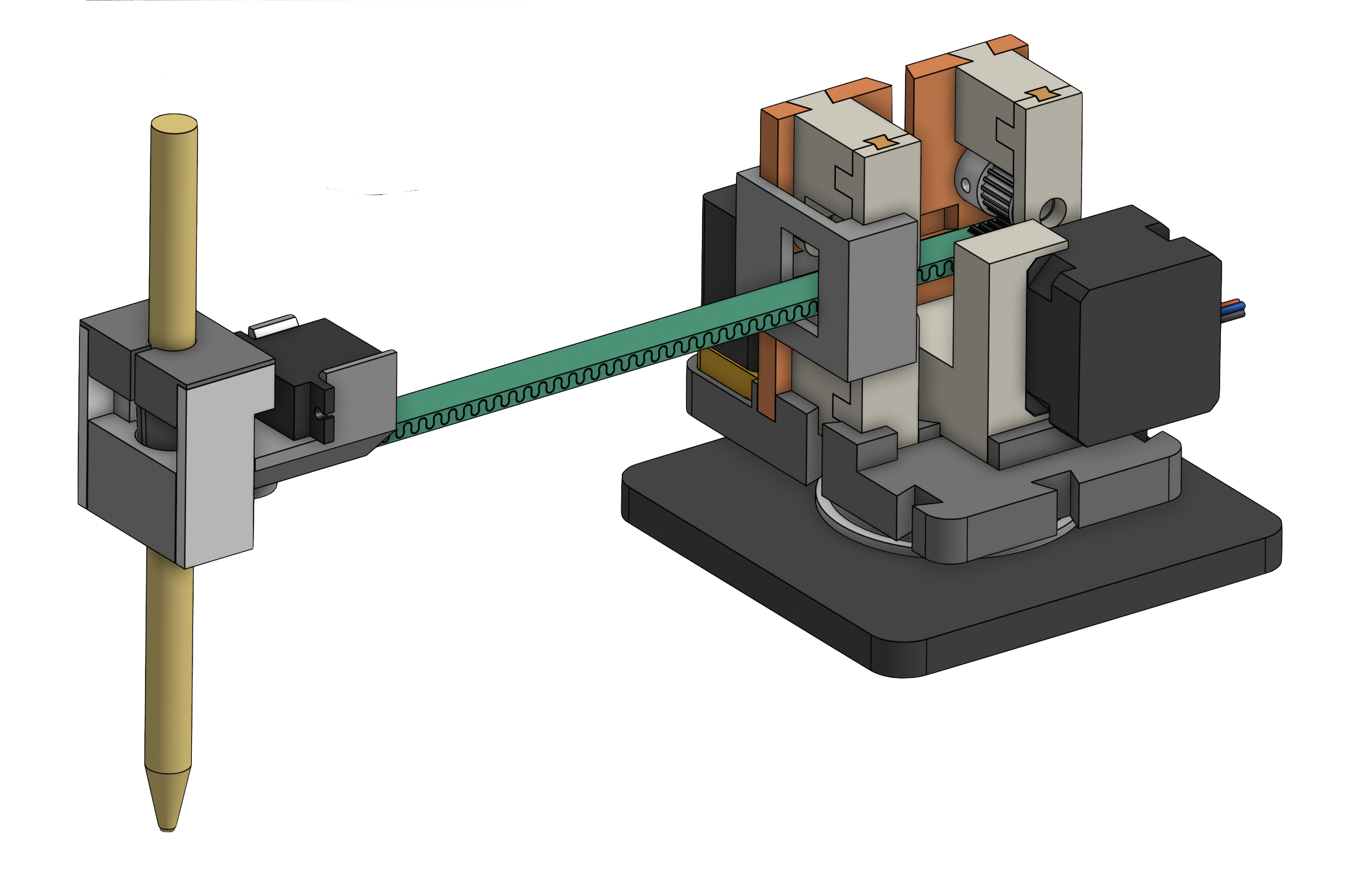 [1] One-arm table plotter: zipper actuator on a rotary base, pen holder with flex;
[1] One-arm table plotter: zipper actuator on a rotary base, pen holder with flex;
[2] The final system is composed of small modular pieces that allow for adjustability and are quick to 3D print.
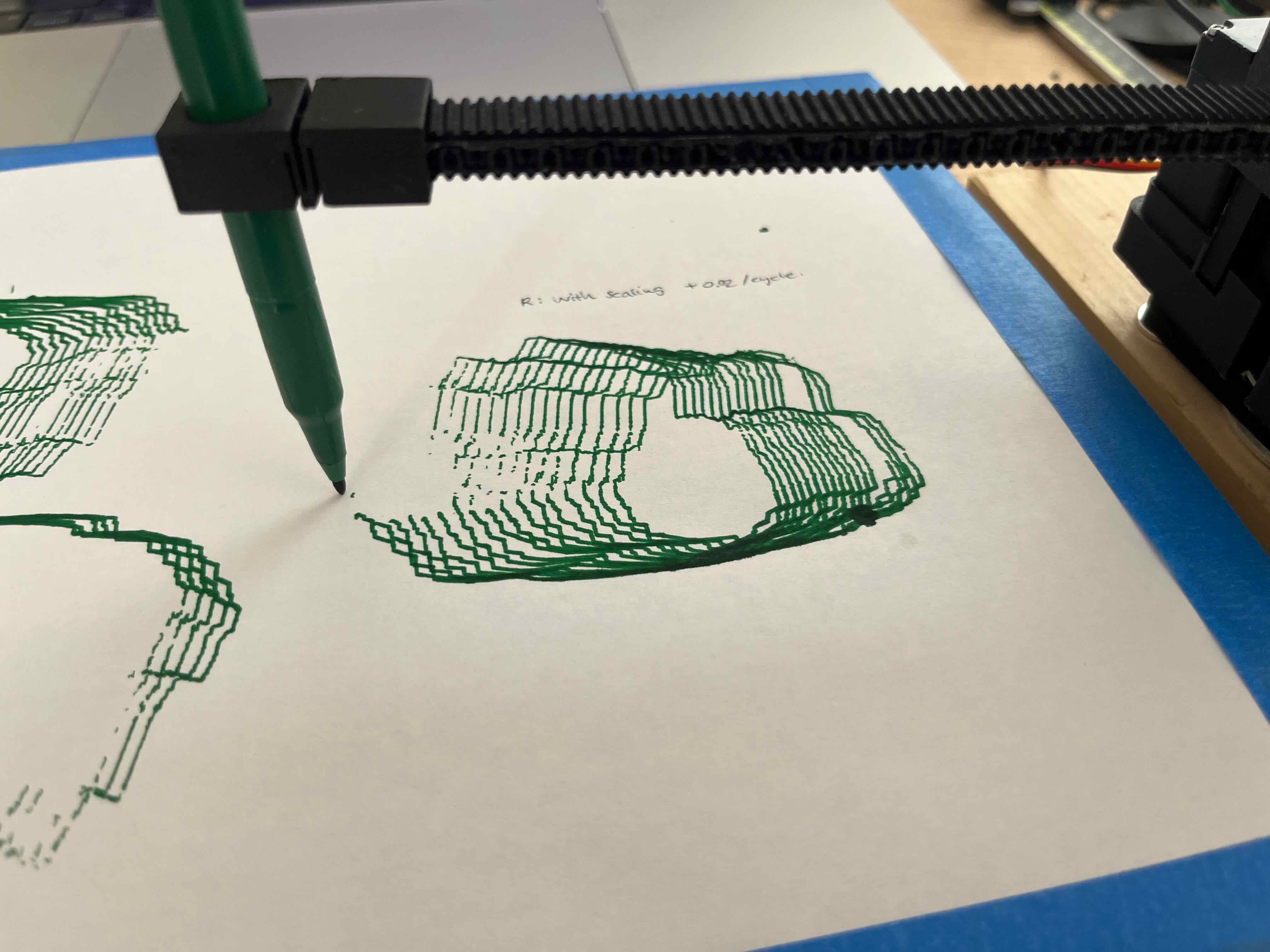 Plotting a 'circle' with incremental offset (+10 steps) and stretching (+2%) in the radial direction with each cycle.
Plotting a 'circle' with incremental offset (+10 steps) and stretching (+2%) in the radial direction with each cycle.
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Bill-of-Materials
The materials and cost breakdown by component:
Component 3: pen actuators (passive/actuated)
| Qty |
Description |
USD |
| 1 |
Micro-servo motor |
4 |
| 1 |
3D printed parts (PLA) |
3 |
| Total |
7 |
| System cost (before electronics) |
101 USD |
| Total system cost (with electronics) |
157 USD |
Reflections
One of the core questions in developing my actuator component was how stiff I could make it and how repeatable the results could be.
The test-case of a simple one-armed pen plotter was useful in showing that it would be possible to have repeatable results within the confines of an A4 paper (I left the plotter running on its own over multiple cycles retracing the same shape).
A servo-actuated pen attachment was also developed, showing that the actuator was able to raise a pen at a an extension of ~120 mm. While the current actuator length was limited by the size of the printbed (~210mm), it would be great to test longer lengths in the future and perhaps iterate the design for enhanced stiffness (although this will need to balanced against the zipper's 'spoolability' - i.e. it's flexibility in the unzipped state).
While I am quite happy with the system as an initial demo of a zipper-based desktop plotter, I did not get round to fully integrating the spooling action
which had been part of the initial tape-based concept. The disassmbled zipper components (3D printed PLA + rubber timing-belt bonded together with cyanoacrylate glue) proved very flexible however, so I would definitely like to complete the prototype by adding a spool over the summer.
Emphasizing modulaity: where possible, I added extra dovetail features so that I could make alterations to prototypes by reprinting small features as opposed to entire parts.
One thing I tried to explore while developing the tape and zipper components of my projects was to anticipate alterations, by
breaking things down into adjustable modules where possible and adding 'superflous' dovetails and hole-patterns to future-proof
components and allow them to be reused from one prototype iteration to the next. This actually worked quite well and meant I was able to reprint small features taking 10's of minutes of print time vs. reprinting whole parts at 1-2 hrs.
I think the total cost could be brought below 100 USD - by choosing a more affordable power supply, microcontroller (like the Xiao RP2040, which runs at ~10USD) and a cheaper bearing solution or alternative (e.g. bushing).