Towards a universal gripper! I want to design a gripper that has an extensible number of fingers, an easy to design range of motion, and internal bracing specific to the geometry of the feedstock we want to pick up.
Another component that would be (difficult but) worthwhile is a kinematic mold. Right now, we're folding from 2D --> 3D using 3-4 stages of molds to prevent creasing. However, a continuous, kinematic mold would simplify the 2D --> 3D pipeline by reducing our system to a feedstock + kinematic mount.
Applications can vary, but a compelling use case is for: (a) pick and place machines for discrete components, (b) robotic assembly.
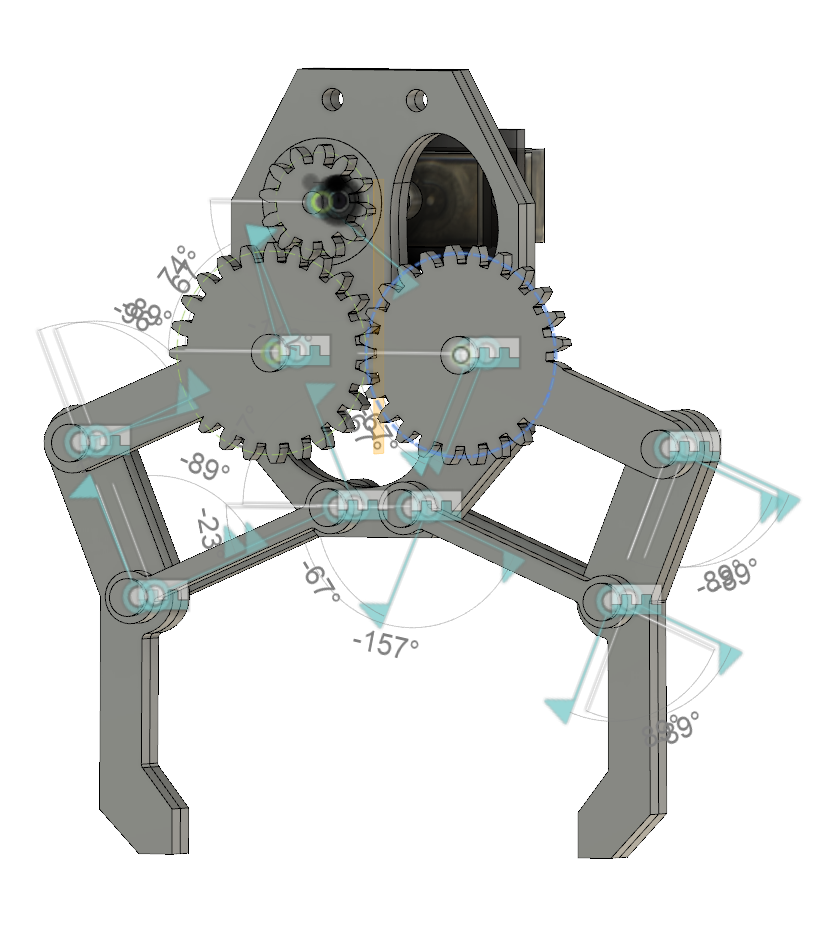
This gripper design is limited to 2 fingers actuated through a servo + gears driving linkages. Although the jaw geometry and the range of motion can be easily adjusted, it's unclear how to easily extend the number of fingers (bevel gears?)
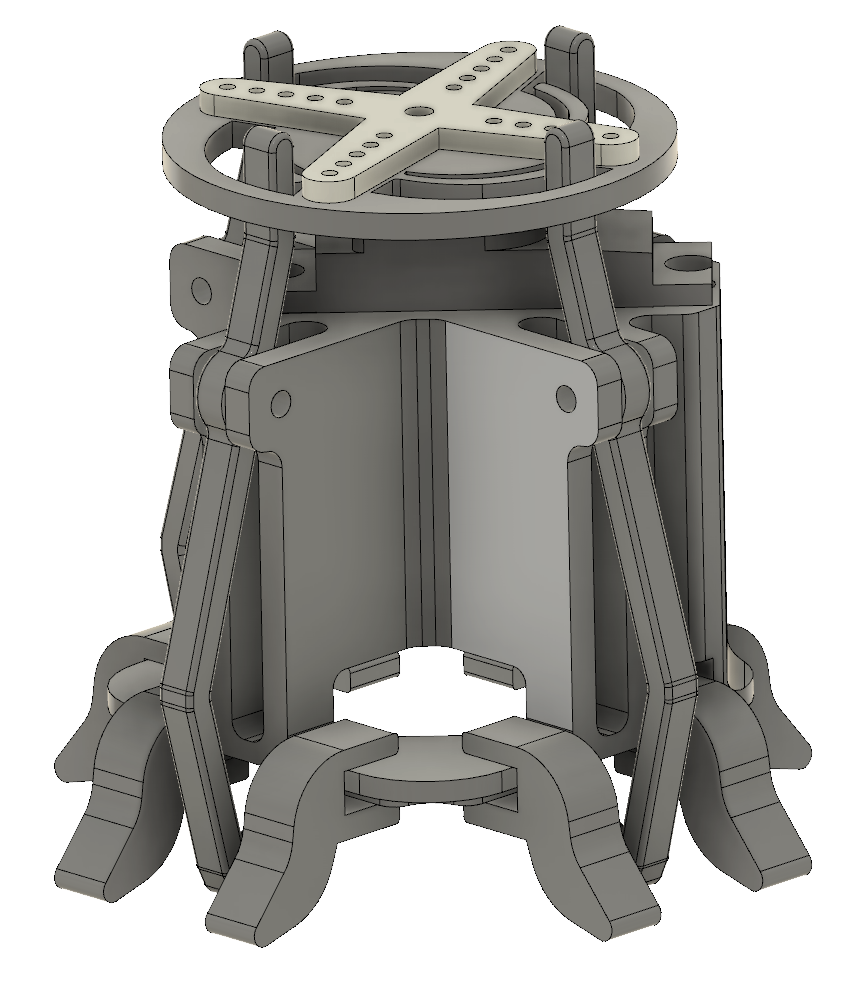
This is the original voxel assembly gripper designed. here, we have a servo that moves through a curved spiral. The advantages are that this design is easily extensible for the number of fingers and also has internal bracing. However, the range of motion is limited by the slope of the spirals and more iterative design is required to see how much this can be pushed/how wide the jaws can open.