
Frame/Motor Control
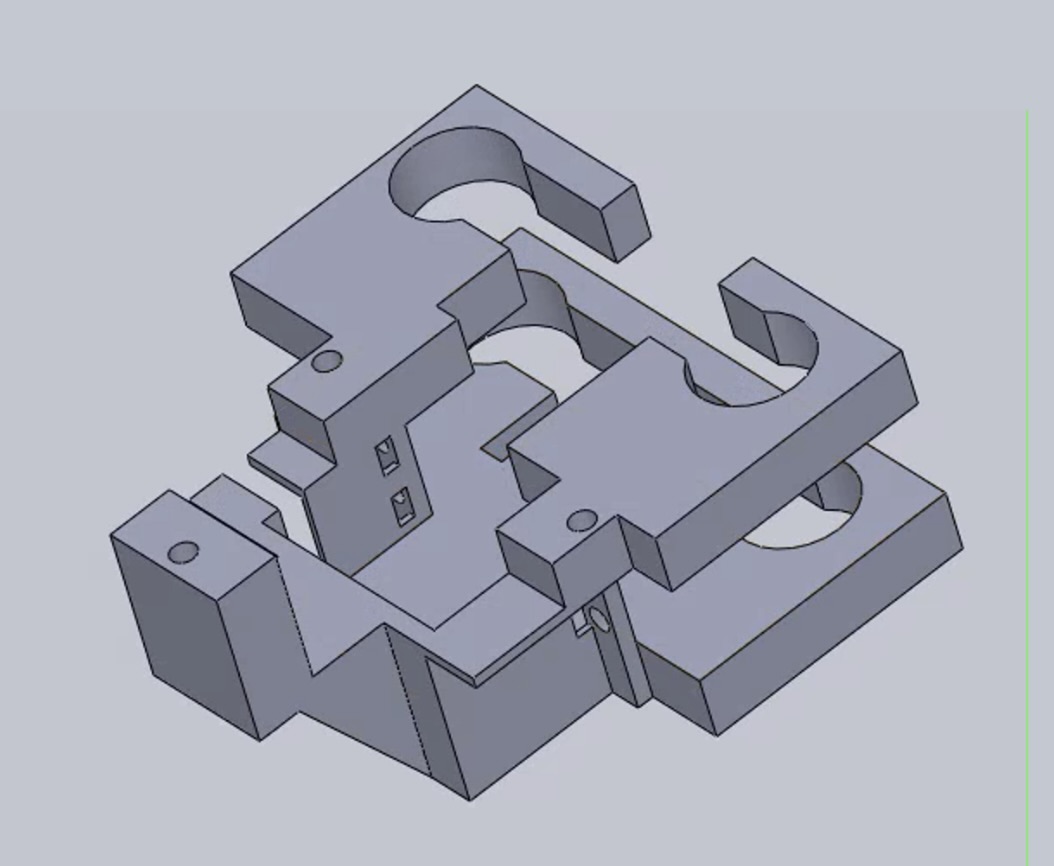
End Effector

Software
Harvard Section - HTMAA 2024
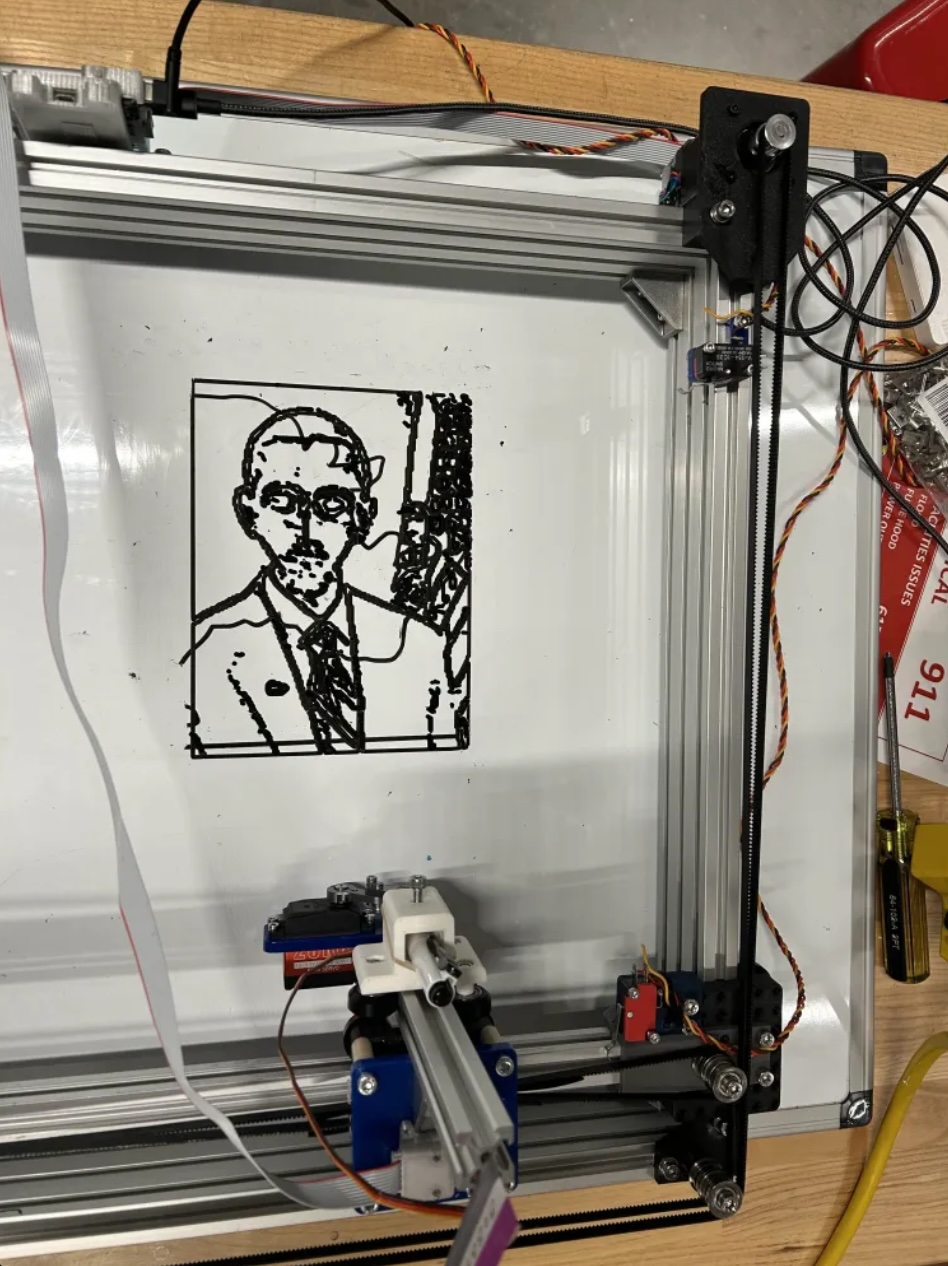
The concept of our robot was to build a core xy drawing machine. Typically, drawing machines are limited to 1-2 uses before requiring new paper or a clean board. We wanted to build a machine that could run completely self-sufficiently. Therefore, we conceptualized a robot that could both draw and erase, enabling many drawings to occur consecutively. For the robot’s first drawing task, we decided to draw caricatures.
To get started, we divided our group into three main teams: the Frame and Motor Team, the End Effector Team, and the Software Team. We structured the teams in this way because this enabled groups to work independently of each other and then come together at the end. We also determined a documentation lead and point people on each team to assist with documentation.
You can find the final video below, as well as a higher resolution version linked here.
We want to say a special thank you to our TFs Gail and Leo for all of their support in this process! Also, Bobby, our fearless team leader, deserves a special shoutout!