Input Devices
This week I learn about step response with transmit-receive, I also learn Python and a little bit of C programing. For my final project, I need a linear potentiometer to translate the finger position so that the 2 servos can translate it to right, left, up and down hand movements. See my previous work below.
The benefits of using capacitive touch to read the finger gestures is that everything would be hidden under the hand resting platform, and it would be a nice and natural experience to the user.
I started by studying this example http://fab.cba.mit.edu/classes/863.13/people/akashbad/week9/
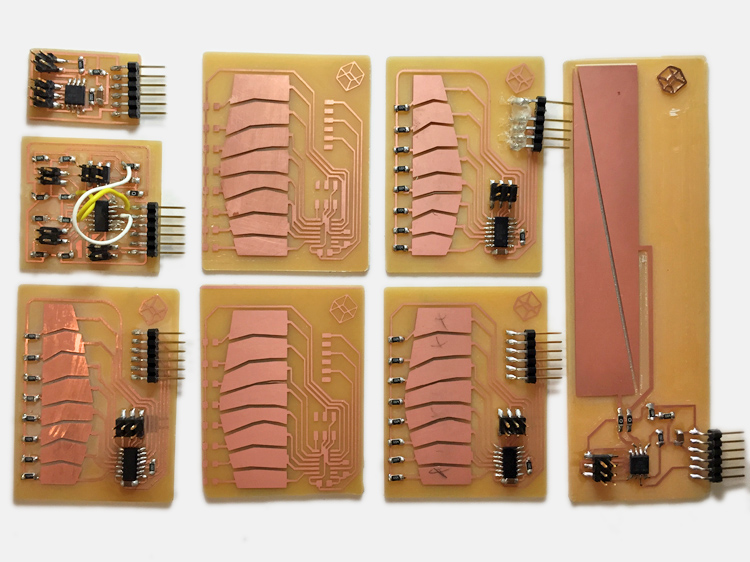
I modified the board so it feels more natural as the finger move across the board, but I didn’t edit the circuit because I want to see how it works first.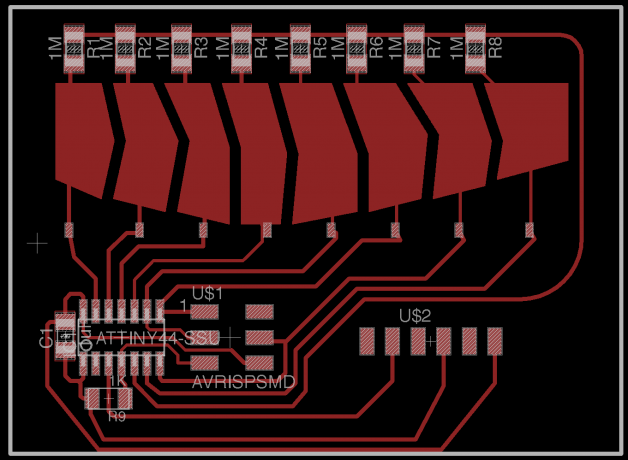
I made a few mistakes in the process of making the board, but I had 3 useable boards.
Why 3 boards? Because none of them worked. I used Akash Badshah’s Make file, I was able to load the file onto the chip but I wasn’t able to get any serial data. After swapping out the Tinny44 Chip out 3 times, I am still not any data.
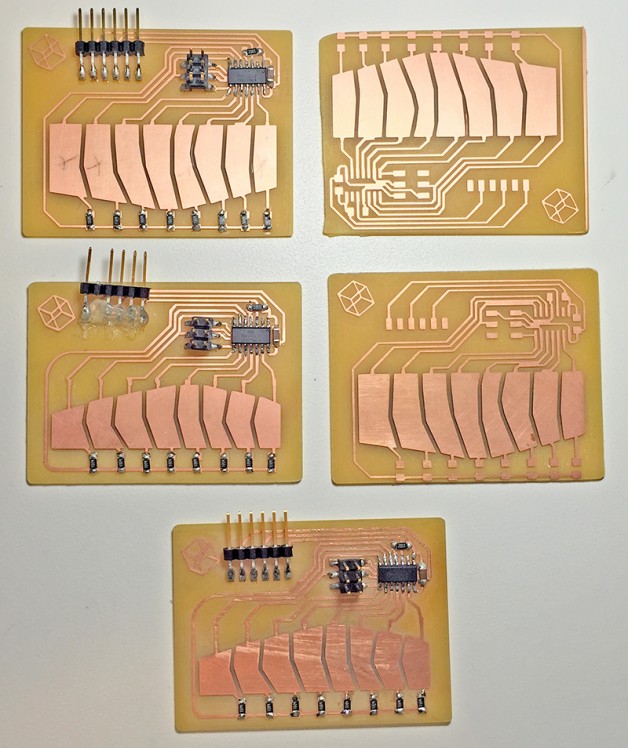
So I decided to try Matt Blackshaw’s board, which is what Akash Badshah’s based off. I get the same issue as Akash Badshah’s board, the program uploads but no serial data.
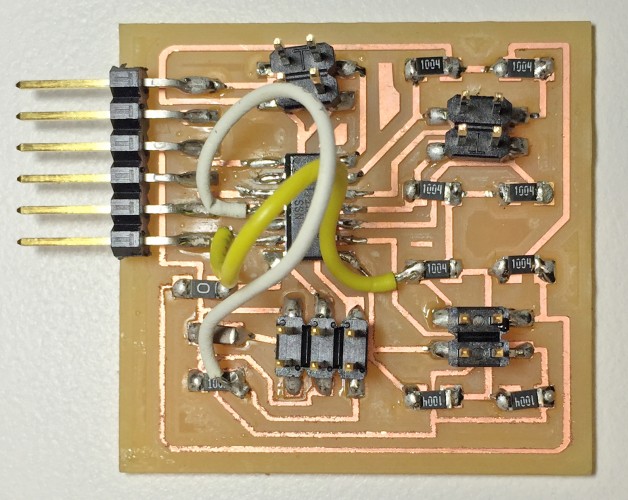
I decided to start something simple, and make it work first. So I re-mill the board using Neil’s transmit-receive step response example, and it works great. Now I can start making my own board.
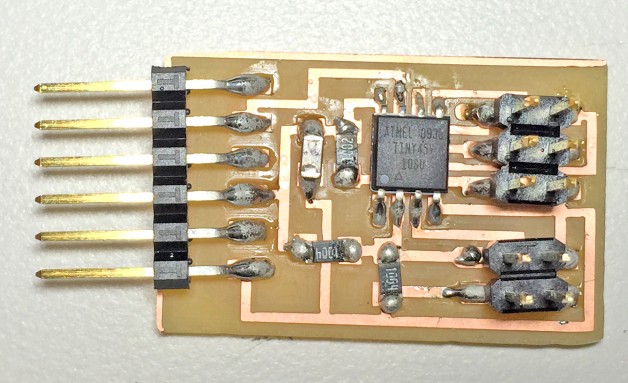
I added the slider right on the board and cover it up with tape for my demo..

Download Make File and Py file
Commands that I’ve used
make -f hello.txrx.45.make sudo make -f hello.txrx.45.make program-usbtiny python hello.txrx.45.py /dev/tty.usbserial-FTH9M2MN |
Dans:rxtx danchen$ <strong>make -f hello.txrx.45.make</strong> avr-objcopy -O ihex hello.txrx.45.out hello.txrx.45.c.hex;\ avr-size --mcu=attiny45 --format=avr hello.txrx.45.out AVR Memory Usage ---------------- Device: attiny45 Program: 660 bytes (16.1% Full) (.text + .data + .bootloader) Data: 5 bytes (2.0% Full) (.data + .bss + .noinit) Dans:rxtx danchen$ sudo make -f hello.txrx.45.make program-usbtiny Password: avr-objcopy -O ihex hello.txrx.45.out hello.txrx.45.c.hex;\ avr-size --mcu=attiny45 --format=avr hello.txrx.45.out AVR Memory Usage ---------------- Device: attiny45 Program: 660 bytes (16.1% Full) (.text + .data + .bootloader) Data: 5 bytes (2.0% Full) (.data + .bss + .noinit) avrdude -p t45 -P usb -c usbtiny -U flash:w:hello.txrx.45.c.hex avrdude: AVR device initialized and ready to accept instructions Reading | ################################################## | 100% 0.00s avrdude: Device signature = 0x1e9206 avrdude: NOTE: "flash" memory has been specified, an erase cycle will be performed To disable this feature, specify the -D option. avrdude: erasing chip avrdude: reading input file "hello.txrx.45.c.hex" avrdude: input file hello.txrx.45.c.hex auto detected as Intel Hex avrdude: writing flash (660 bytes): Writing | ################################################## | 100% 0.59s avrdude: 660 bytes of flash written avrdude: verifying flash memory against hello.txrx.45.c.hex: avrdude: load data flash data from input file hello.txrx.45.c.hex: avrdude: input file hello.txrx.45.c.hex auto detected as Intel Hex avrdude: input file hello.txrx.45.c.hex contains 660 bytes avrdude: reading on-chip flash data: Reading | ################################################## | 100% 0.82s avrdude: verifying ... avrdude: 660 bytes of flash verified avrdude: safemode: Fuses OK (H:FF, E:DF, L:62) avrdude done. Thank you. Dans:rxtx danchen$ <strong>python hello.txrx.45.py /dev/tty.usbserial-FTH9M2MN </strong> |