Topics for the semester
Topics for the semester
 introduction introduction
|
|||||
assignments
|
|||||
|
readings
|
|||||
|
projects
|
|||||
|
pictures
|
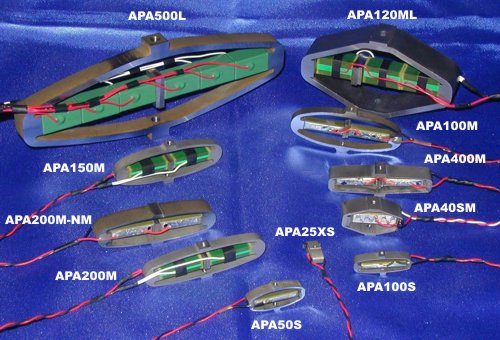
Pocket Milling machine
The idea behind this proposal is to be able to shrink down a milling machine down to the size where it could fit in your pocket. With better metrology and deterministic machine design, machine tools are reaching sub-micron limits in resolution and accuracy. The idea is to build a small-stroke (2cm by 2cm by 2cm milling volume), very high resolution (sub-micron) milling machine. With a smaller stroke lengths it is possible to design a compliant mechanism based machining stages which provide very high resolution and repeatability. With possibilities of FIB (Focused Ion Beam) machined Tools it would be possible to explore usage of such a machine in prototyping MEMS based true 3 dimensional structures.Applications
1. Milling microfluidic circuits - advantages - deeper channels (~ 1 mm ), various materials can be milled, 3D surface profile for channels
2. Milling tools for dentists - should be able to make 3D prototypes of tooths rapidly - with very high resolution - 6 axis machining.
Design Specifications
1.
 Error Budget for Modela MDX 15 , (coming up)
Error Budget for Modela MDX 15 , (coming up)
2.
FRADPARC for Pocket Milling Machine
3. Analysis and control of a parallel kinematic mechanism for a XY theata stage.
References
1. Electrochemical Machining , Philippe Allongue et al. Science Vol 289 July 2000
2. FIB shaped microtools , Picard Precision Engineering 27(2003), 59-69
3. Construction and testing of nanomachining instrument, Gao et al. Precision Engineering 24(2000) 320-328
4. Tool geometry study in micromachining, F Z Fang et al., J. Micromech. Microeng. 13(2003) 726-731
Design of low-profile large range Z actuator for micro-maniplulator stage
Functional requirements for the stage1. Travel range = 10mm
2. Resolution = sub micron
3. Symmetric design for nullifying thermal growth
4. Moderate stiffness for bearing substrate weight and machining forces (very low in our case)
5. High frequency response , ie. not flimsy for good support
Concepts for Actuator selection : various options are listed below
1. Piezo-electric actuators - provides resolution required ( 10 - 50nm resolution, open loop). Large force for high stiffness. Does not provide large range. Roughly 100 micron travel provided by actuator 50mm long. Thus a large amplification is necessary.
2. Stepper motors. Resolution dependent on the transmission mechanism ; usually bearings. Friction makes the mechanism unrepeatable.
3. DC motor with bearings
4. Voice coil
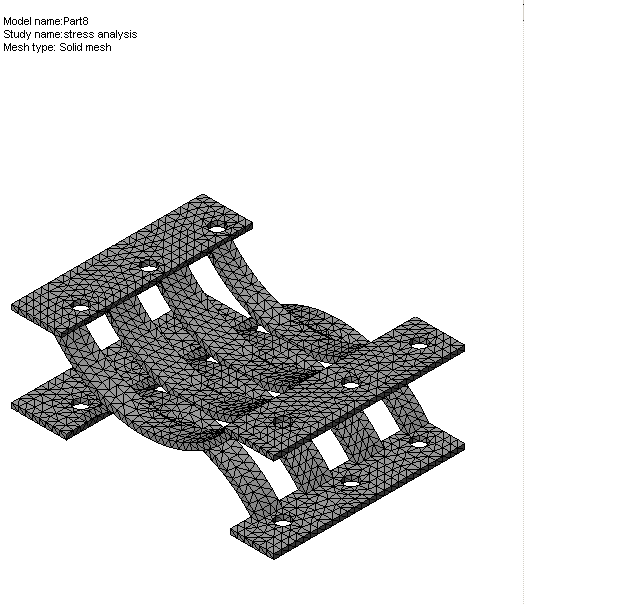
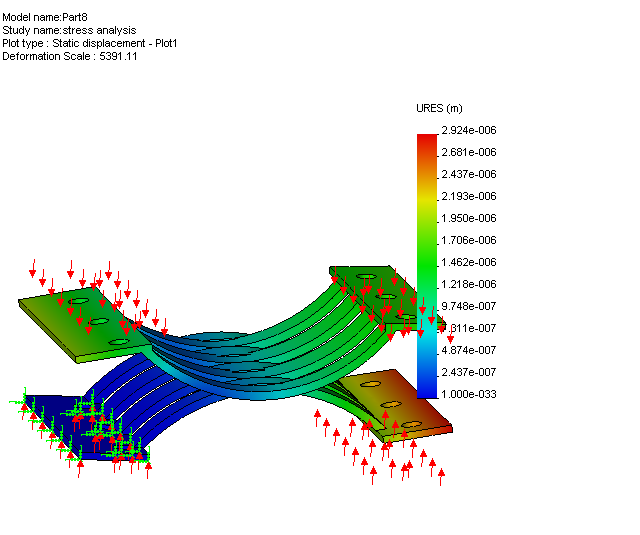
A compliant mechanism was constructed and tested for diaplacement in cosmos. The results are shown below.
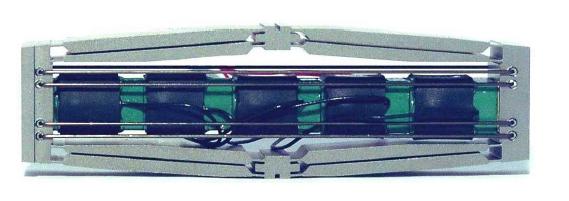
A list of commercial flextensional piezo- actuators is also provided below. The most commmon design used is the bridge, or double bridge. The amplification factor usaually is 15.
The pictures below have been used withoutpermission for academic purposes. Please do not copy without permission of the source.


Complete CAD design for pocket milling machine : 26 april 2004
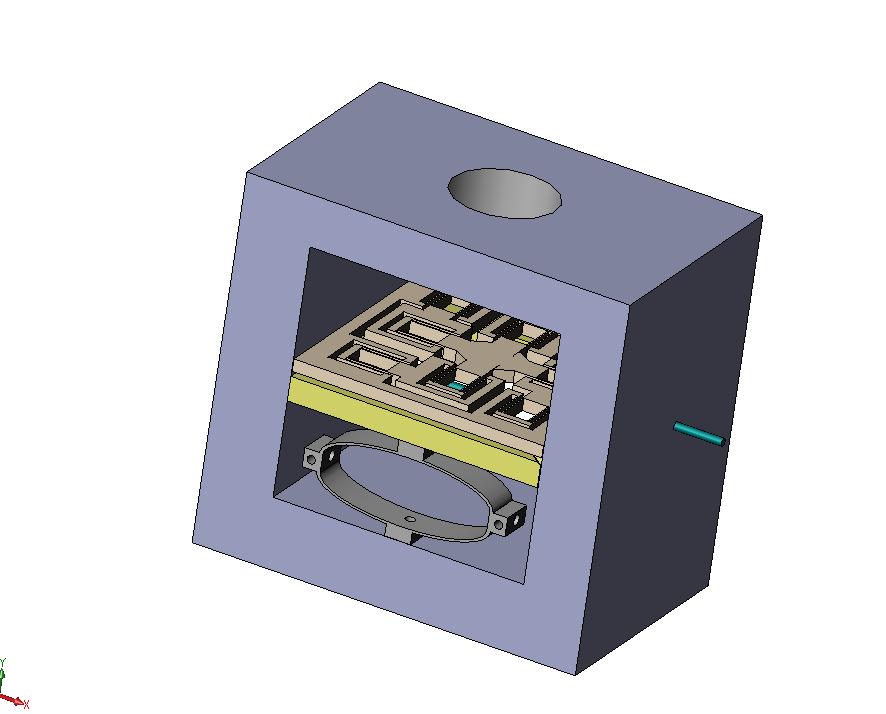
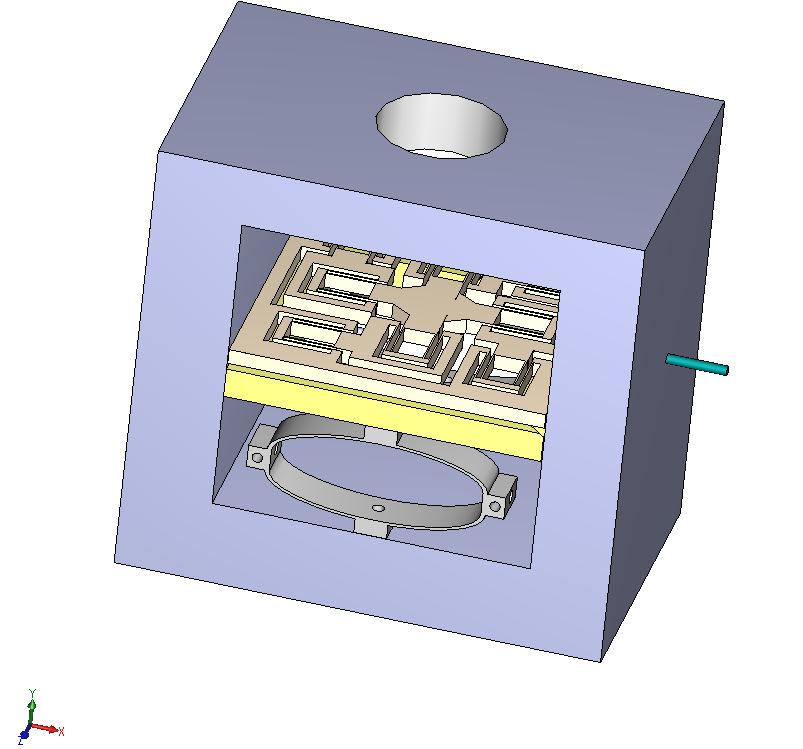
Figure 1 : Assembly of complete machine without actutaors. A symmetric design was choosen to reduce thermal errors. The structural loops are extremely tight to ensure that low-frequency noise is not a problem. The block holds the high rpm spindle which is well supported by a rigid block.
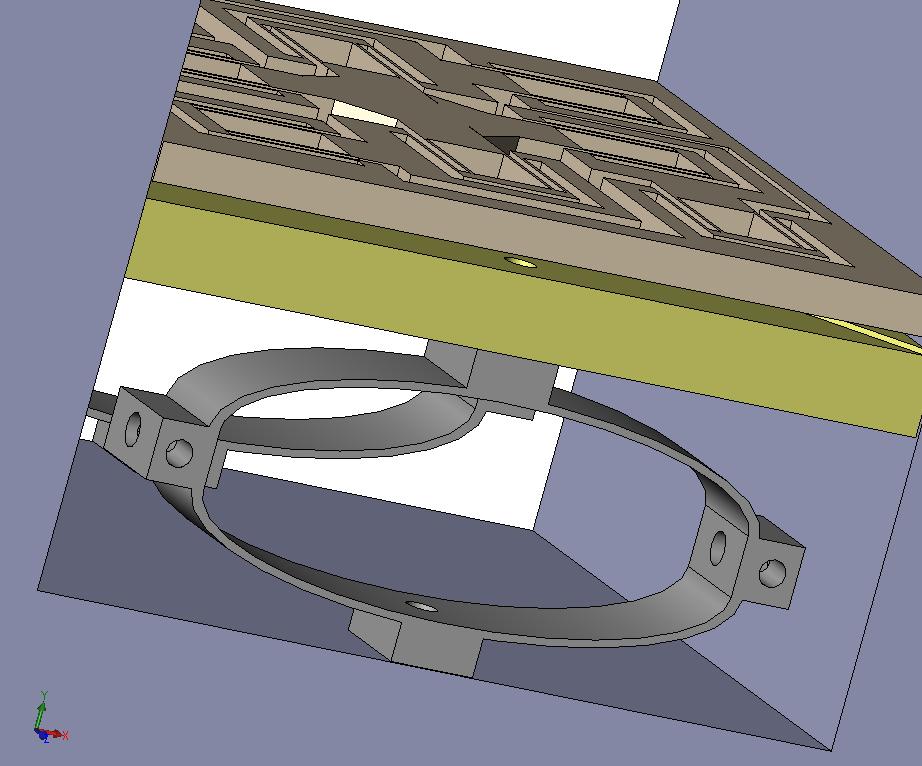
Figure 2: Close-up of the mechanism, which shows the XY stage and Z stage. XY stage design is based on Phd work by Shorya Awtar (Recently graduated student, Prof. Slocum's group) Link . The goal would be to test the XY stage for large range (1-1.5cm).
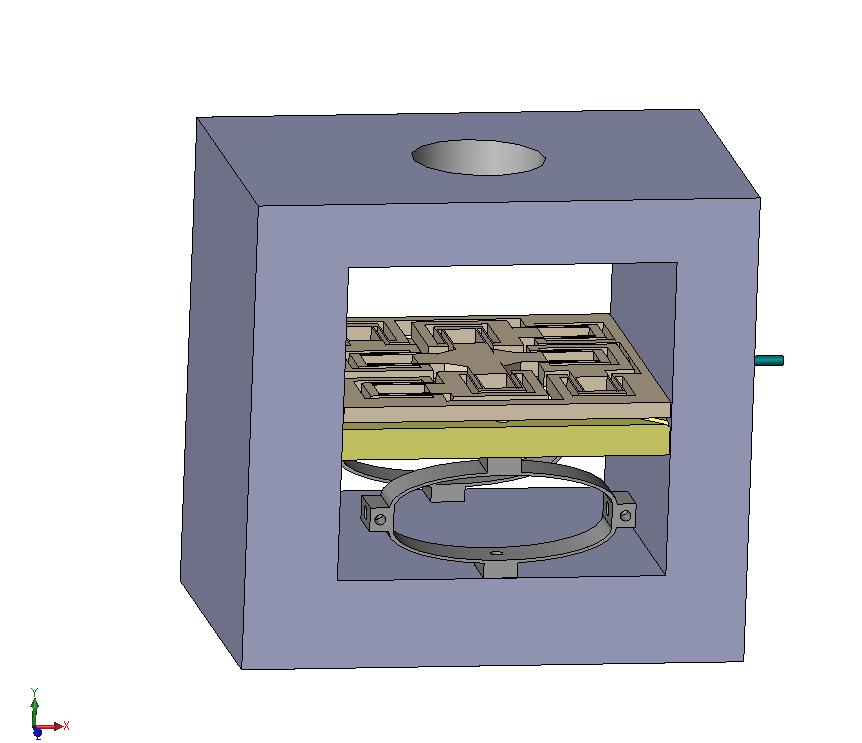
Figure 3: Another view of the machine. The X axis actuator is shown on the sides.

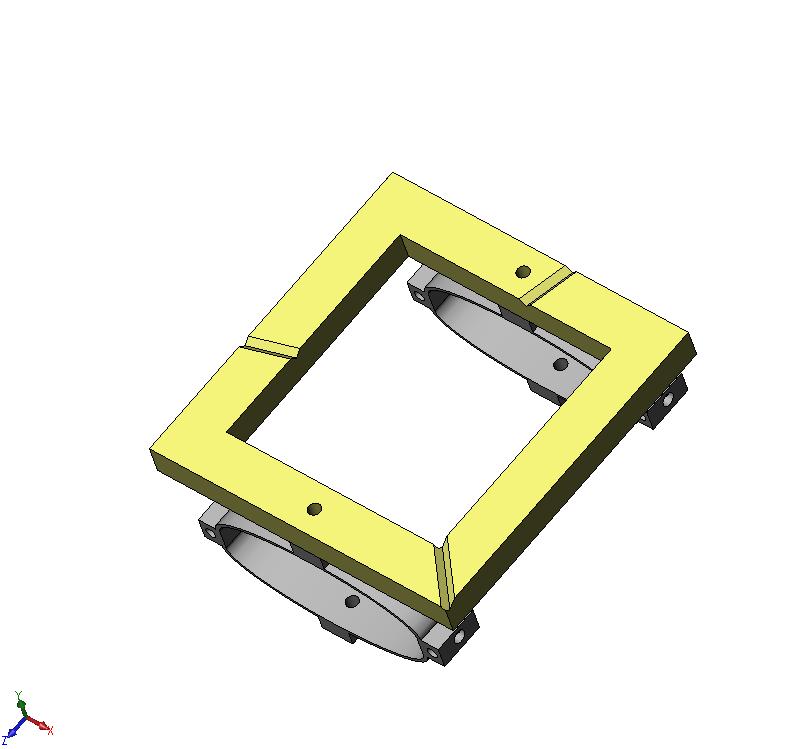
Figure 4: View of the XY stage with the Z stage actuators, and kinematic coupling between the two stages. The Z actuators can also be stacked up to get a higher range of motion (O(1cm)).
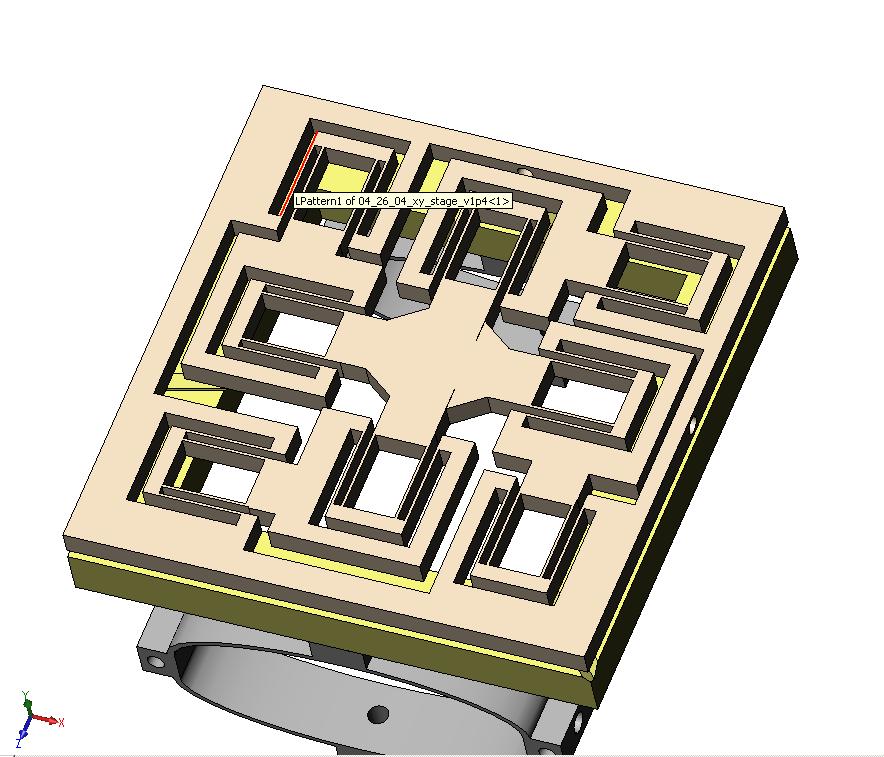
Figure 5: Another view of XY stage