Week 1: Project Proposal
Hands
My initial idea is to build a posable hand. They'll probably need to be motorized to fulfill the electronics requirement. I would like to allow for as much range of motion as possible, but I'm limited by the complexity of the mechanism I can create.
Mechanism
The two main choices for how the finger segments are connected are hinges and ball socket joints. Ball socket joints would allow for complete freedom of motion, and if the hand is restricted to just being posable, that would be a perfectly reasonable solution. I'd probably just use screws to tension the joints just like metal armatures for stop motion are built.

Ball socket joints actually offer much more motion than I need. Hinges allow for most of the motion I desire with just limited differences from actual hands. Hinges are much simpler to actuate using either a motor at the joint or by pulling tendons. I'll probably end up using tendons with springs and servos to actuate hinge joints. There is an existing project which does a similar idea, but only uses servos to contract the fingers with nothing keeping them extended. I'd probably use some springs to provide tension opposing the servos. I might choose to use the servos to extend instead of contract so the hand can have some gripping strength by loosening the tendons. There are also some projects focusing on the control side which will need some thought on my part.
http://archive.fabacademy.org/archives/2016/fablabcarnegiesciencecenter/students/170/mechanical_design.html
http://archive.fabacademy.org/archives/2016/fablabcarnegiesciencecenter/students/170/machine_design.html
http://fab.cba.mit.edu/classes/863.14/people/alan_kwan/Final%20Project.html
http://fab.cba.mit.edu/classes/863.11/people/daniel.rosenberg/p6.html
http://fab.cba.mit.edu/classes/865.15/classes/measurement/articulated-hands.pdf
I designed some finger segments using OnShape. Their version of parametric design is using configurations to provide lengths and other values. Those numbers can be adjusted later to tweak the model without having to start from scratch or dig into the model. Making changes is fairly robust for 2D sketches, but it starts to get a bit questionable for 3D shapes. Often, sketches based on faces are anchored to weird points. Sometimes if the lengths change too much, the entire model can break. This would be obvious in cases of impossible parameters, but it sometimes happens for no apparent reason.
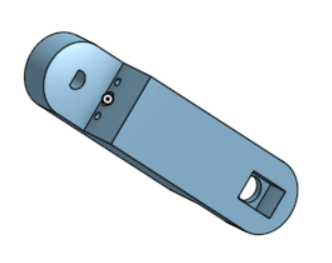
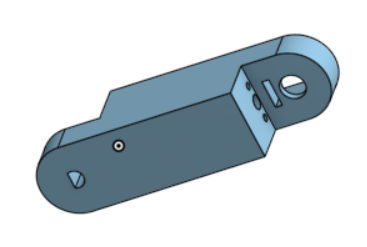
.stl file
Stretch Goals
If the actual mechanism for the hand is working, it might be possible to route wires through the fingers for power and data. Adding additional mechanical features might also be possible.
Finger Ideas:
- Solid fingertips (metal, plastic, wood, silicone)
- Gooseneck/extendable light on end of finger
- Marking fingertip (Sharpie, pen, pencil, rotating exacto)
- Magnetic fingertip (electromagnetic with twist/button control)
- USB/headphone jack/SD card fingertip (maybe just thumb)
- Tweezer/alligator clip/smooth clip/pointy fingertips, firm rotation allowed (might need tension in joints)
- Head proof palm for soldering
- LED light in palm with controls around light or on back of hand (rotating dial or iPod ring style touch control)
- Camera in finger/palm (maybe in the middle of the light)
- Fingers strong enough for the hand/arm to hang from the fingers gripping something
- Snapping/pinching/grasping would be nice
- Mount the hand/arm on a long desk lamp style arm where the shoulder joint is mounted to the table with an elbow joint. Make the arm detachable. Maybe just a forearm on a ball socket joint.
- A glove or visual control system using a special glove with markers or flex sensors might be nice for control
- Make at least the fingertips modular. The thumb might be special if you add extra features there. Ideally, the palm, the rest of the fingers and the arm would be modular as well.
- Consider a sheathed cable system or hydraulics or linear actuators instead of loose cables. The problem is that I want motion of the palm and of the fingers moving side to side as well as just the fingers curling. It's tough to get the speed, accuracy and size though.
- Consider making an oversized hand to ease size restrictions instead.
- Some kind of useless machine style feature might be funny.
Alternative Ideas
-
There's a great project from 2012 of a pair of linked chess boards where moves on one board are automatically played on the other. That project's already really well done, but there is a bit of additional work which could be done in improving piece recognition and the speed of the movements.
http://fab.cba.mit.edu/classes/863.12/people/salzberg/final.html
-
A watch would be another interesting project. The first example project from Harvard is really nicely done, but my focus would be on making a tactile watch. There are some which involve touching the hands on the dial or touching ball bearings running around a track, but distinguishing the exact minute is difficult with those. Some kind of mechanism with a jump minute or some pistons which went up and down would be more exact.
http://fab.cba.mit.edu/classes/863.16/section.Harvard/people/Gulati/final.html
-
Similar to the watch idea, creating a mechanical clock, probably using a pendulum for regulation, would be interesting, but it's hard to see where the electronics would come in. The mechanical design would probably be quite challenging.
-
A workbench/workstation could be an interesting project. I'd focus on either making it collapsible to save space or adding some kind of interactive capability.
-
An origami machine has been a long term interest of mine, but all the mechanisms I've seen online put very severe restrictions on the possible designs.
-
A machine for scanning loose papers or pages from a book would be pretty useful. Without camera systems to track where the paper is, I could see the system being very finicky in manipulating the paper.
-
A digital assistant for answering questions or recording notes would be useful for augmenting an individual's memory.
-
A system for rotating an object with an orbiting camera around it would be nice for different purposes like photogrammetry or photography. There are a lot of considerations for how exactly the motion should work and what kind of sensor should be used. There are a couple example projects from previous years.
http://fabacademy.org/archives/2015/eu/students/de_palo.pierluigi/project-menu.html
http://fabacademy.org/archives/2015/eu/students/silli.saverio/project-menu-main.html
-
A floating object using those magnetic levitation systems would be interesting. Constructing the actual magnetic system might be outside my capabilities, and building only the floating part might be a bit too limited in scope.
http://archive.fabacademy.org/archives/2017/fablabbcn/students/4/
-
There's a great project of a Rubik's cube which solves itself. The electronics and the position tracking might be pretty tough. Getting everything small enough to fit inside would also be challenging, but I could create an oversized prototype. Trying to do the same with a jigsaw puzzle might be easier, but the positioning is more difficult.
https://www.youtube.com/watch?v=2vG-YtRmBSw
-
Holographic displays are interesting, but they're still pretty limited in display quality.
http://fab.cba.mit.edu/classes/863.15/section.Architecture/people/Rosenberg/week_11.html
-
Some smart dice with internal flywheels to manipulate the motion would also be fun.
http://fab.cba.mit.edu/classes/863.14/people/jonathan_bobrow/projects/377/
https://www.youtube.com/watch?v=n_6p-1J551Y
-
An orrery is a mechanical model of the solar system. Something with motors and lights would be interesting, but slightly pointless. Maybe one which can keep the Earth at the center.
-
There's a wonderful object called a Gomboc. It's a mathematical object which only has one stable equilibrium and one unstable equilibrium. They were apparently discovered by a couple mathematicians. Models can be purchased online, but the tolerances needed are apparently very stringent and easier versions of the shape are still being searched for. This would be an interesting 3D printing idea, but without a published description, it will likely be impossible to model.
-
The Curta calculator is a great mechanical calculator from the old days. You can still buy them secondhand, but they're quite expensive now. There is a 3D model available in 3:1 scale, so this could be an interesting 3D print.