
The goal for this project was to implement and test an output device with our circuits. For my final project, I proposed making window blinds that can tilt open/closed automatically using a ambient light sensor to determine the light level outdoors.

This servo was hacked to spin continuously
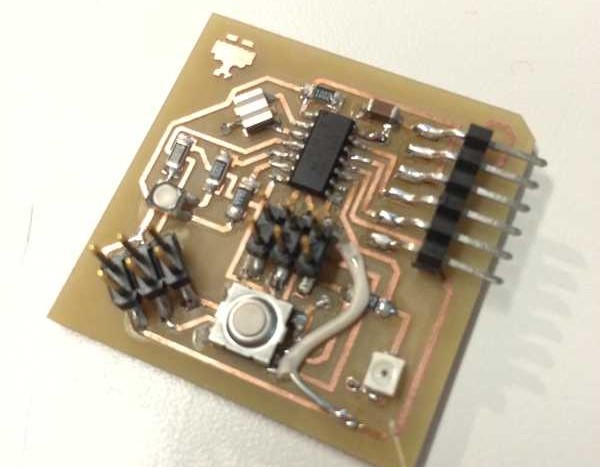
Not much to document here, except that I made a minor modification to my input devices circuit by adding an ISP header attached to ground and a couple of pins for controlling a servomotor.
There are a few different types of motors to choose from when considering output devices. I initially designed my circuit to drive a servo, because with a servo you can set the exact position using PWM. I thought this would be advantageous for my final project since the open/close blinds form one range of continuous values, and it requires knowing the current position of the motor.

As light increases (daytime) servo spins more and more in clockwise direction
One of the limitations of the servo, however, is its limited range in turning. After playing around with a set of blinds, I realized that tilting blinds fully usually requires many turns of the tilt wand. I was able to pick up a hacked servo from someone at the lab so that it could turn continuously.
Of course, hacking the servo creates another problem: having continuous rotation means that it will not be easy to determine the position of the motor!
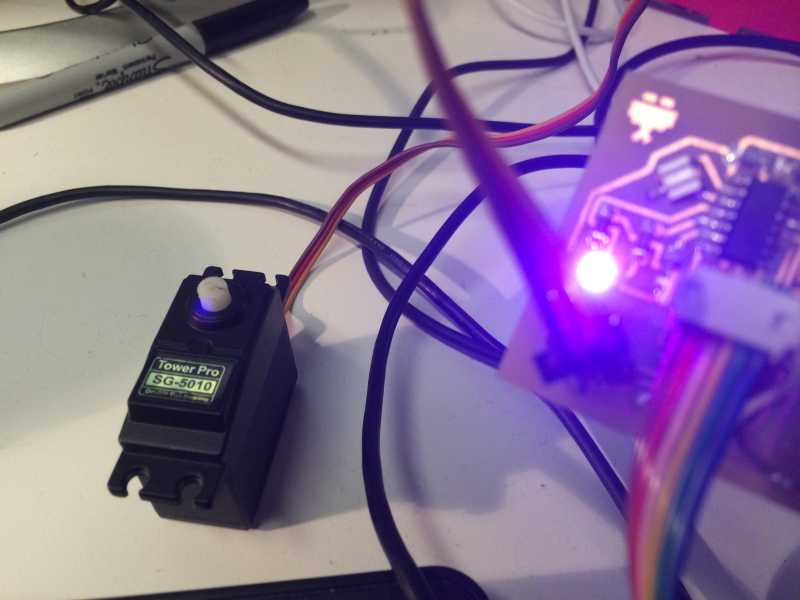
As light decreases, servo spins in counter-clockwise direction
More problems!
For my final project, I will need to implement a method for determining the position of the servo. Most likely will have to alter the circuit to add a current meter to a pin. Will document that in future posts.
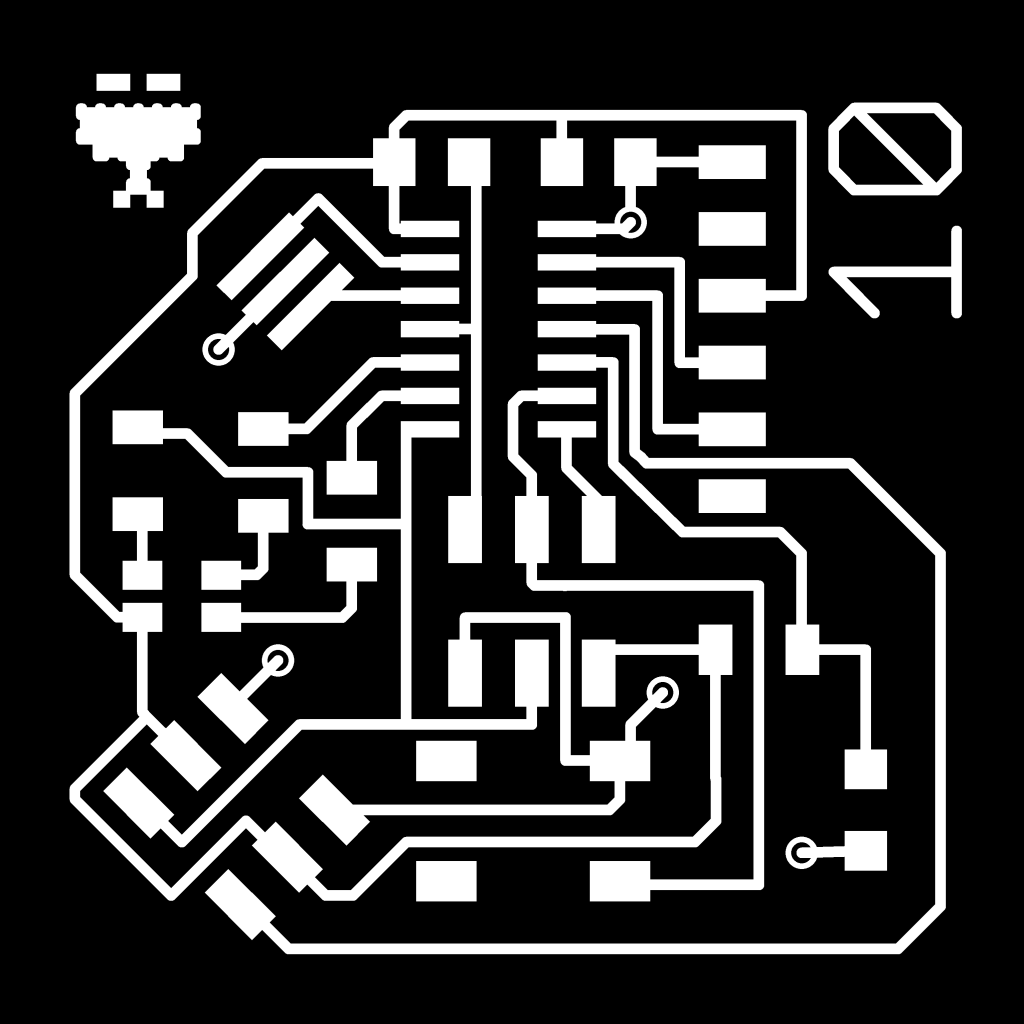
Here are the circuits for reference:
-
- ISP header for servo control and I/O
-

- Cutout + Vias to ground layer
Pingback: [Final Project] Ambilinds – Sunlight-driven Solar-powered Automated Window Blinds | How Ermal Makes (Almost) Anything