
2:30am on a tuesday night.
For output week, I decided to get some progress on my final project, a claycutter machine.
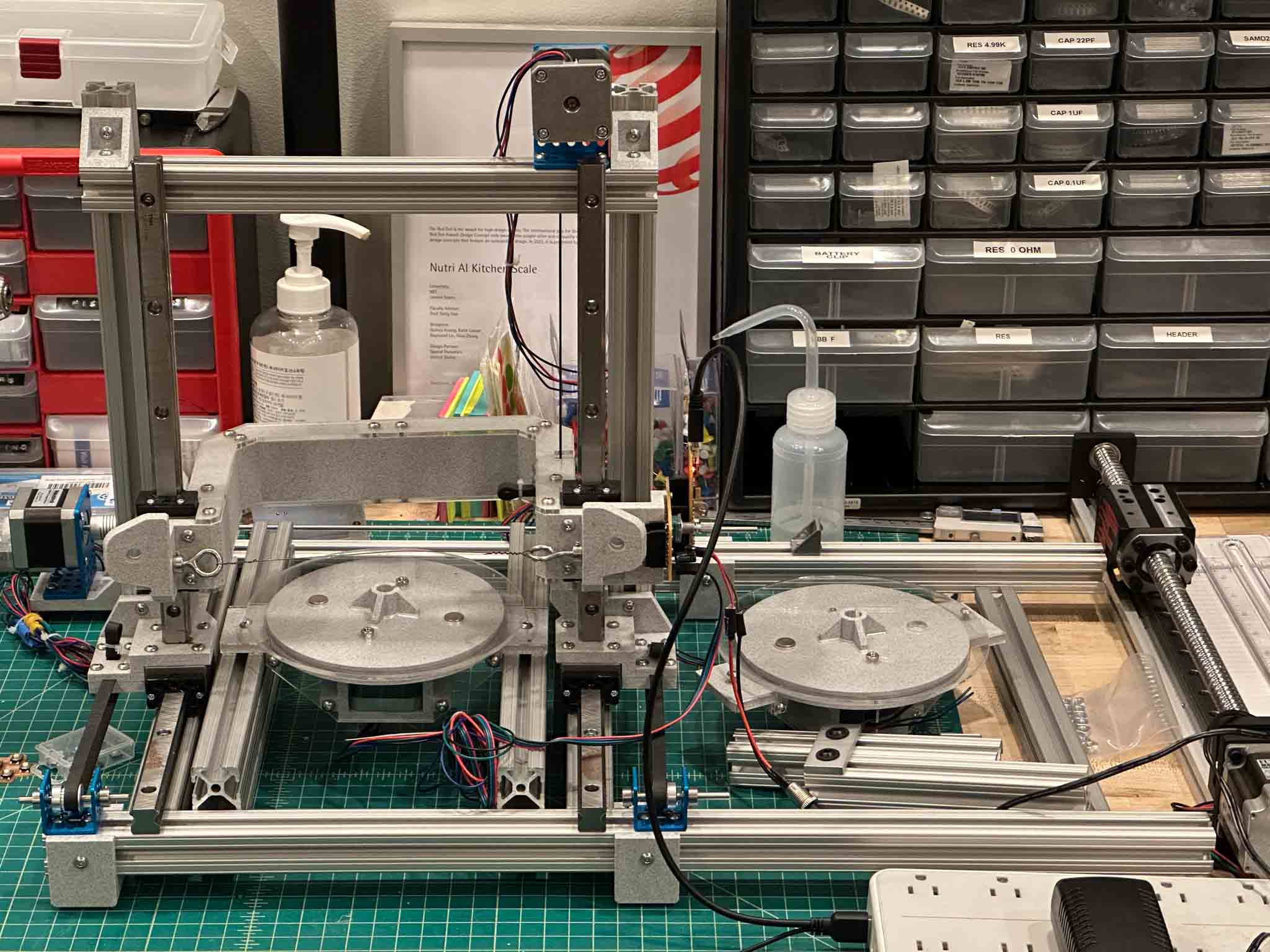
The machine below is a earlier version I made last semester. It is very prelimiary and I hope to design a better version using the skills I learned in HTM.
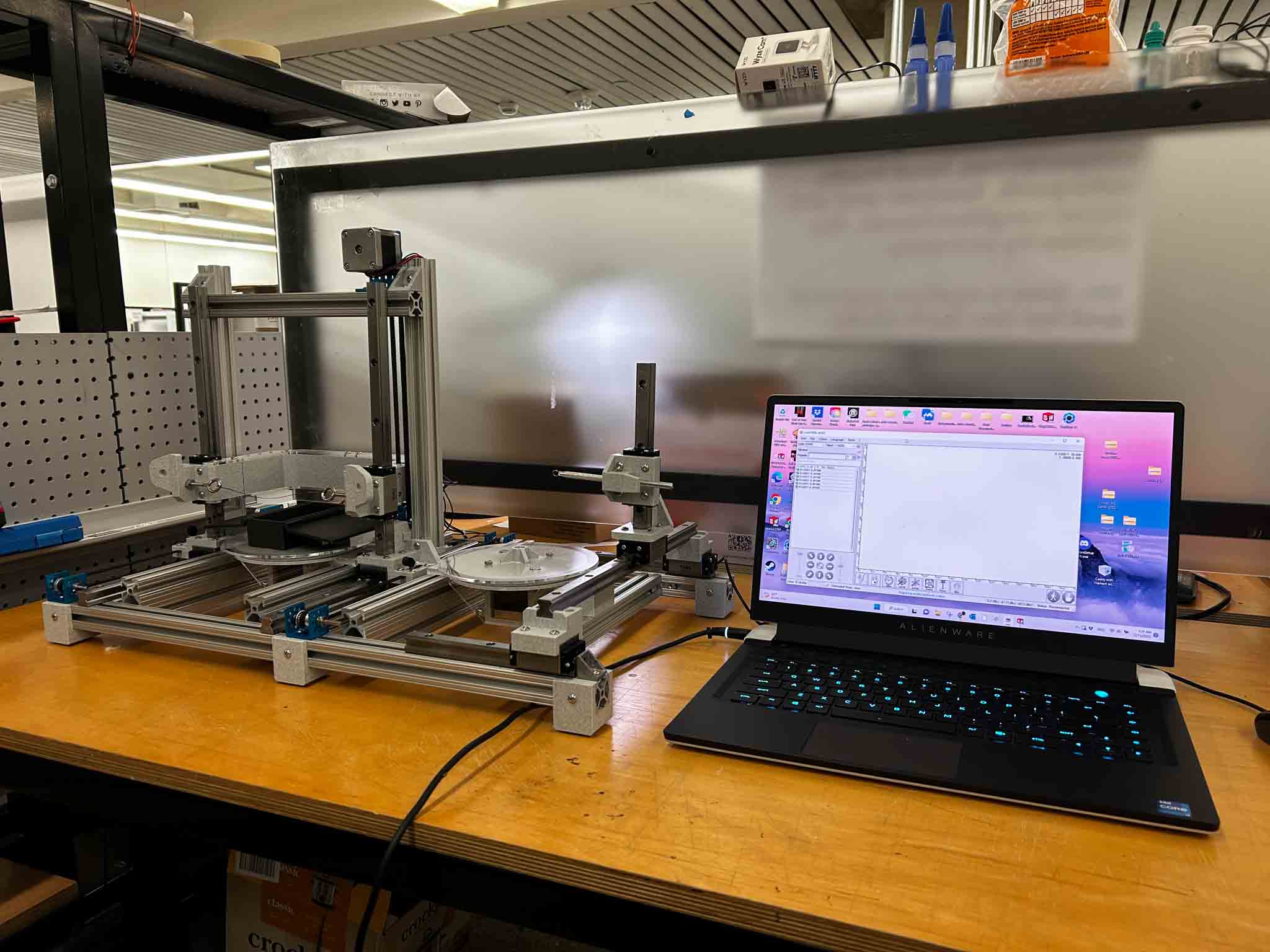
For starter, I decided to tackle the control system I envisioned in my inital drawing where a knob control one of the axis of the clay cutting interface (like the way user rotates in solidworks to change viewing angle).
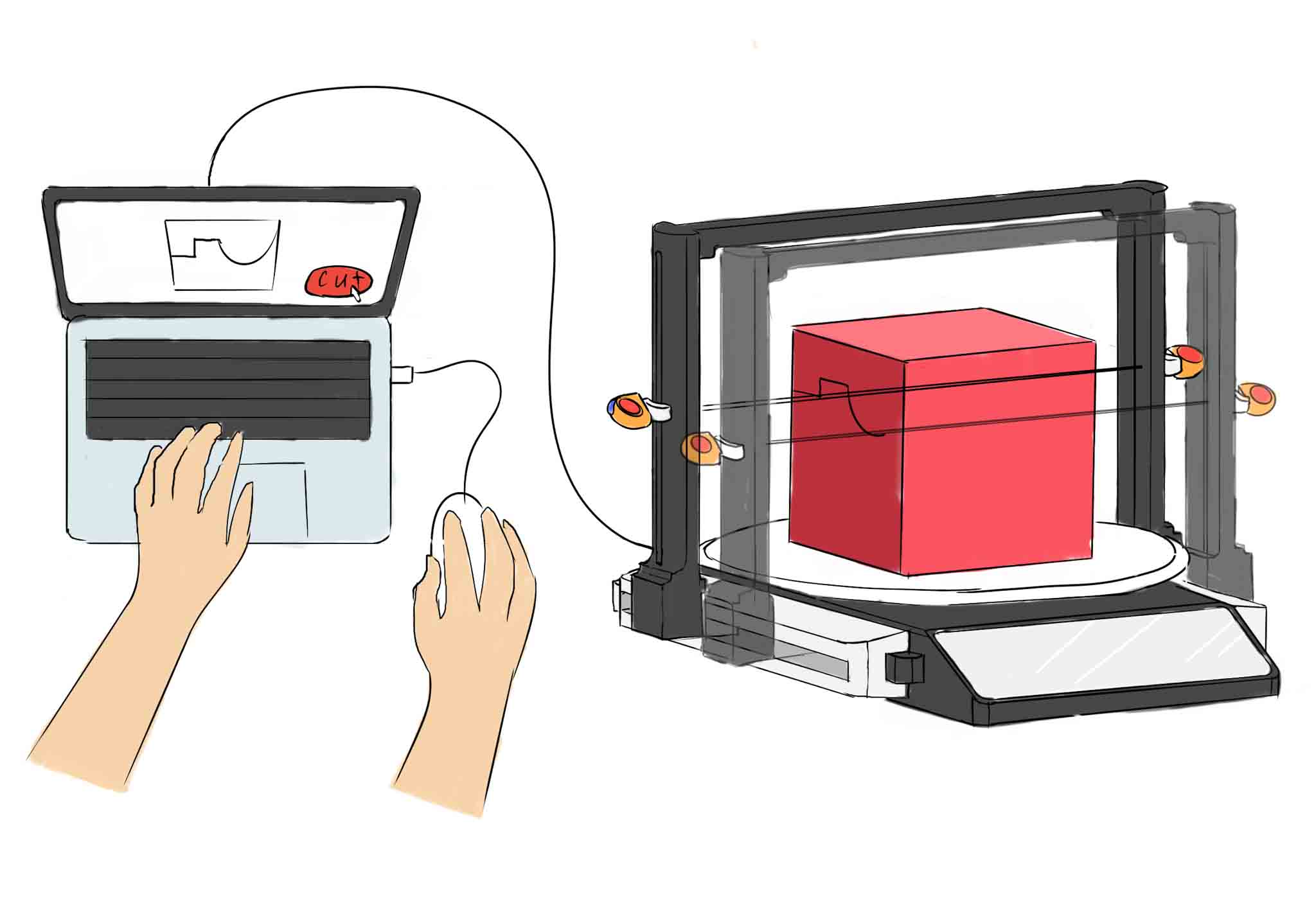
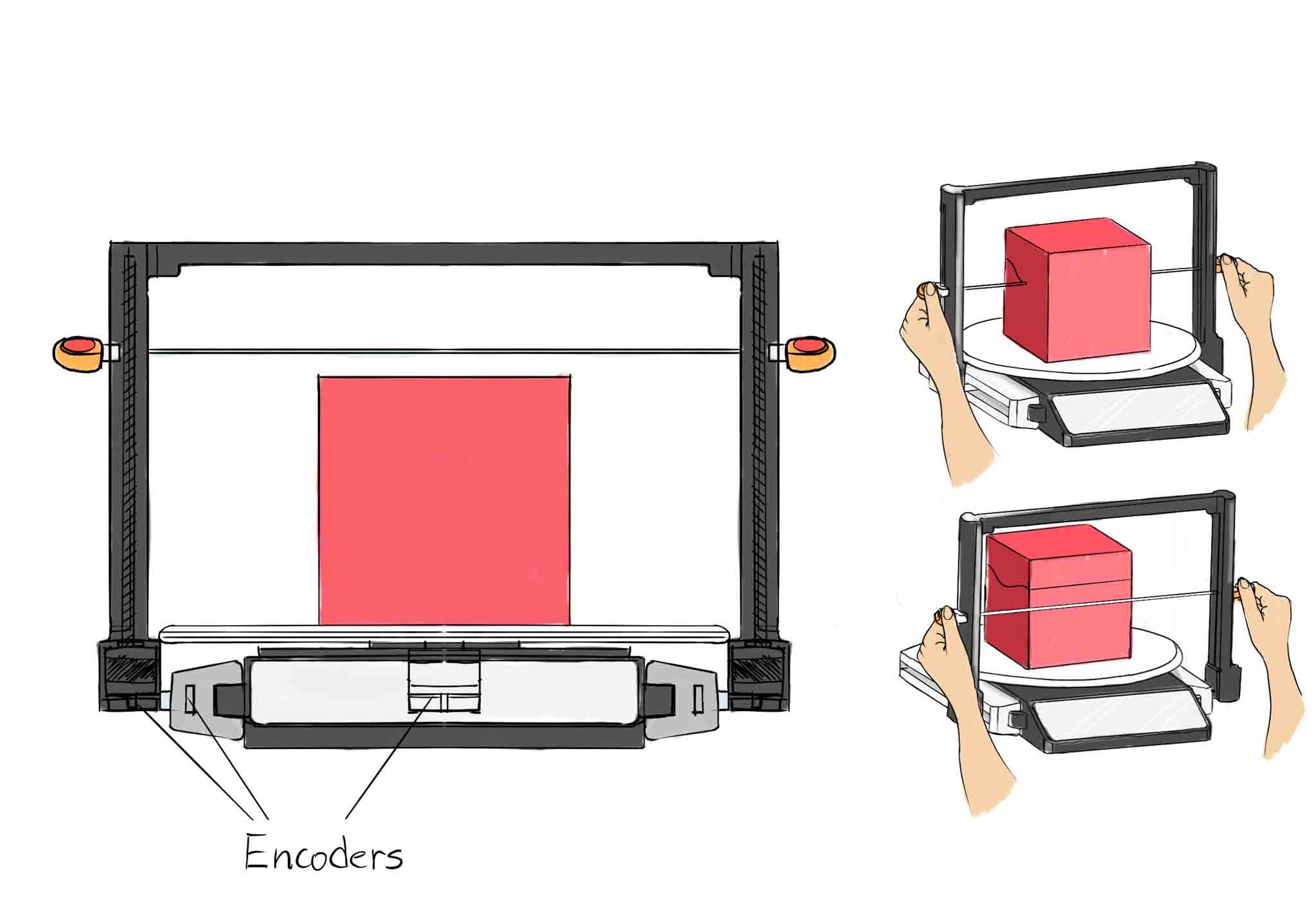
The drawing above roughly represent the idea.
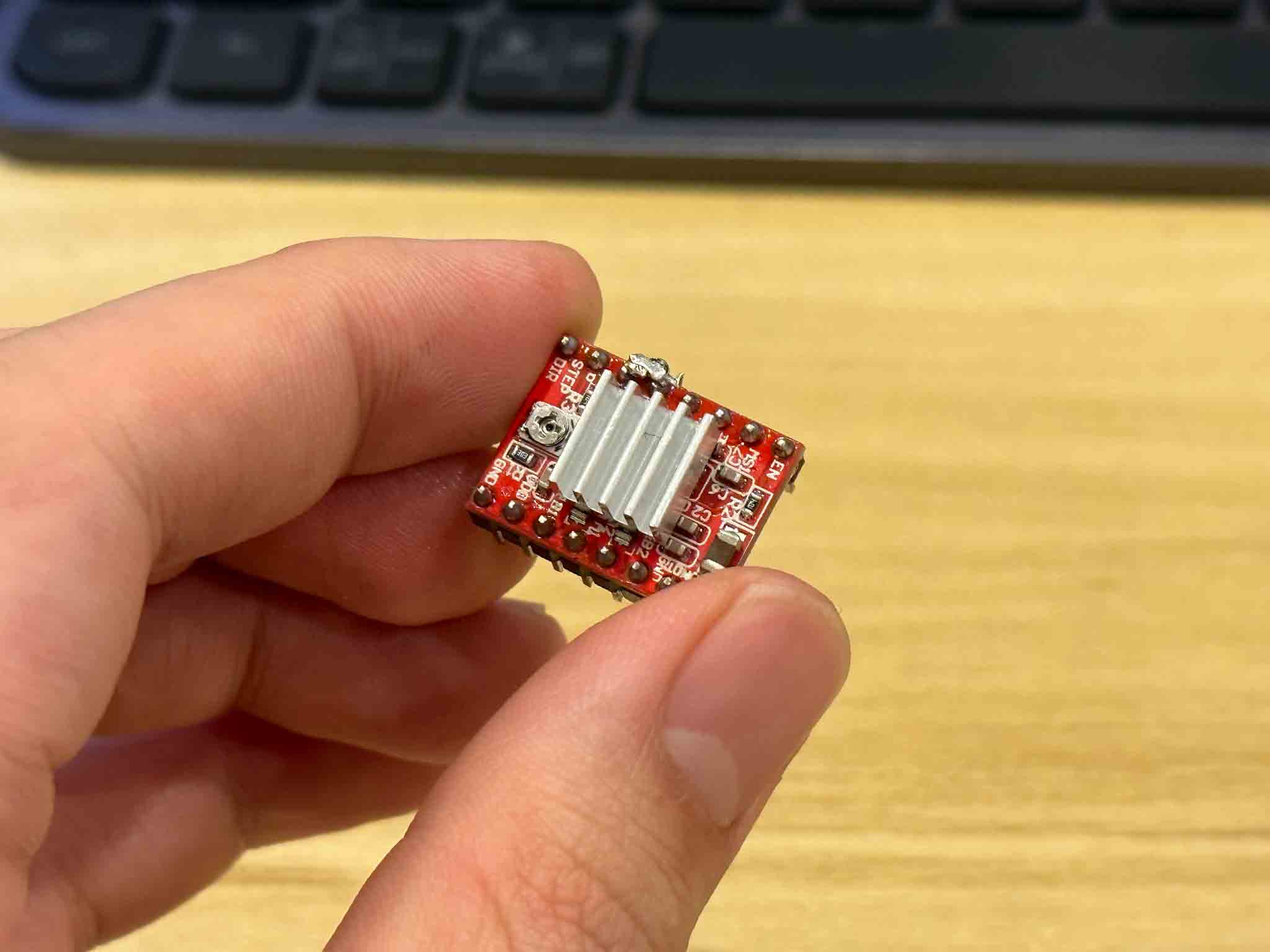
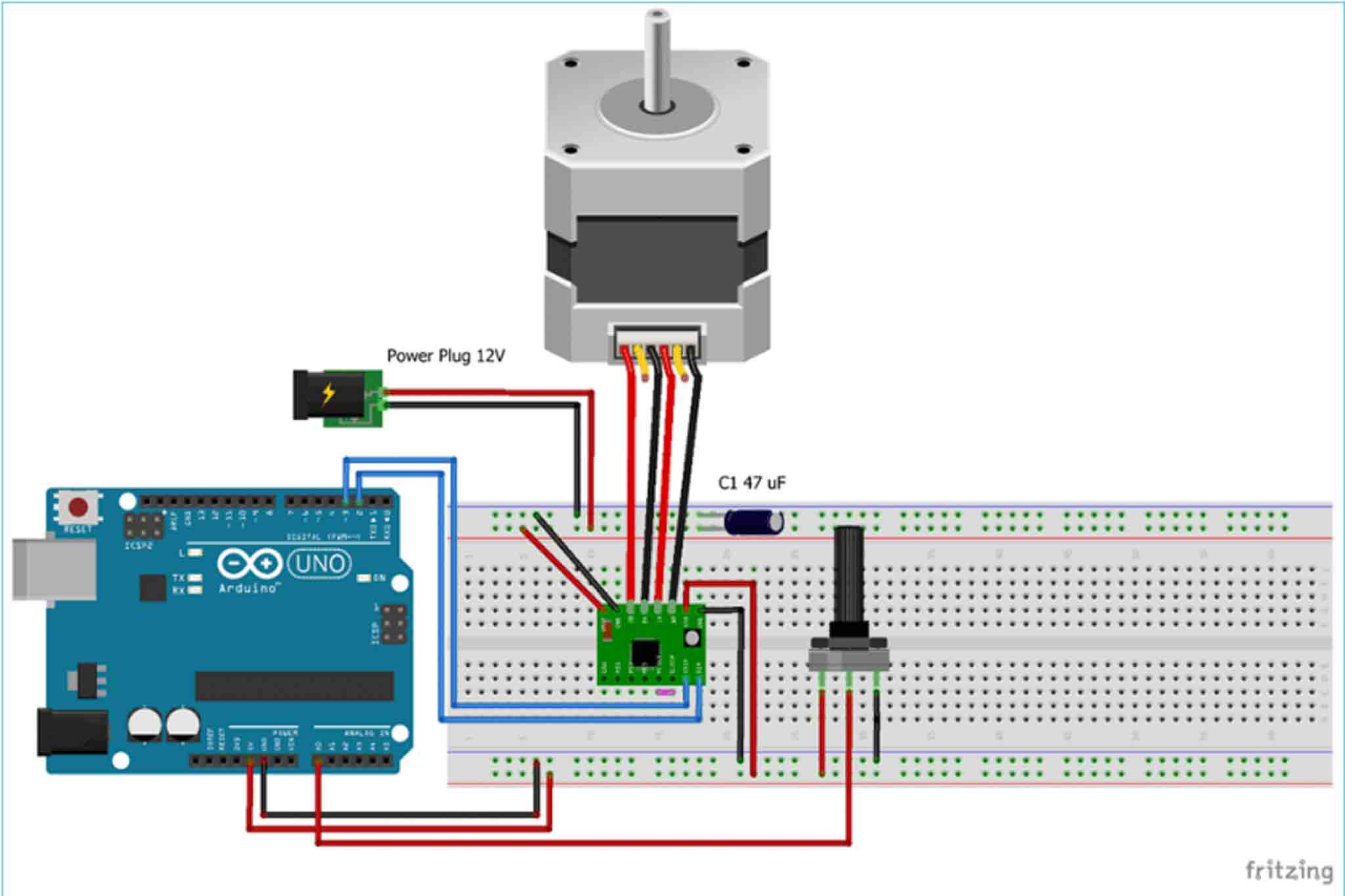
I started by following an existing tutorial online that shows how to control a stepper motor with an a4988 module, which I have one a knock-off version from the earlier prototype.
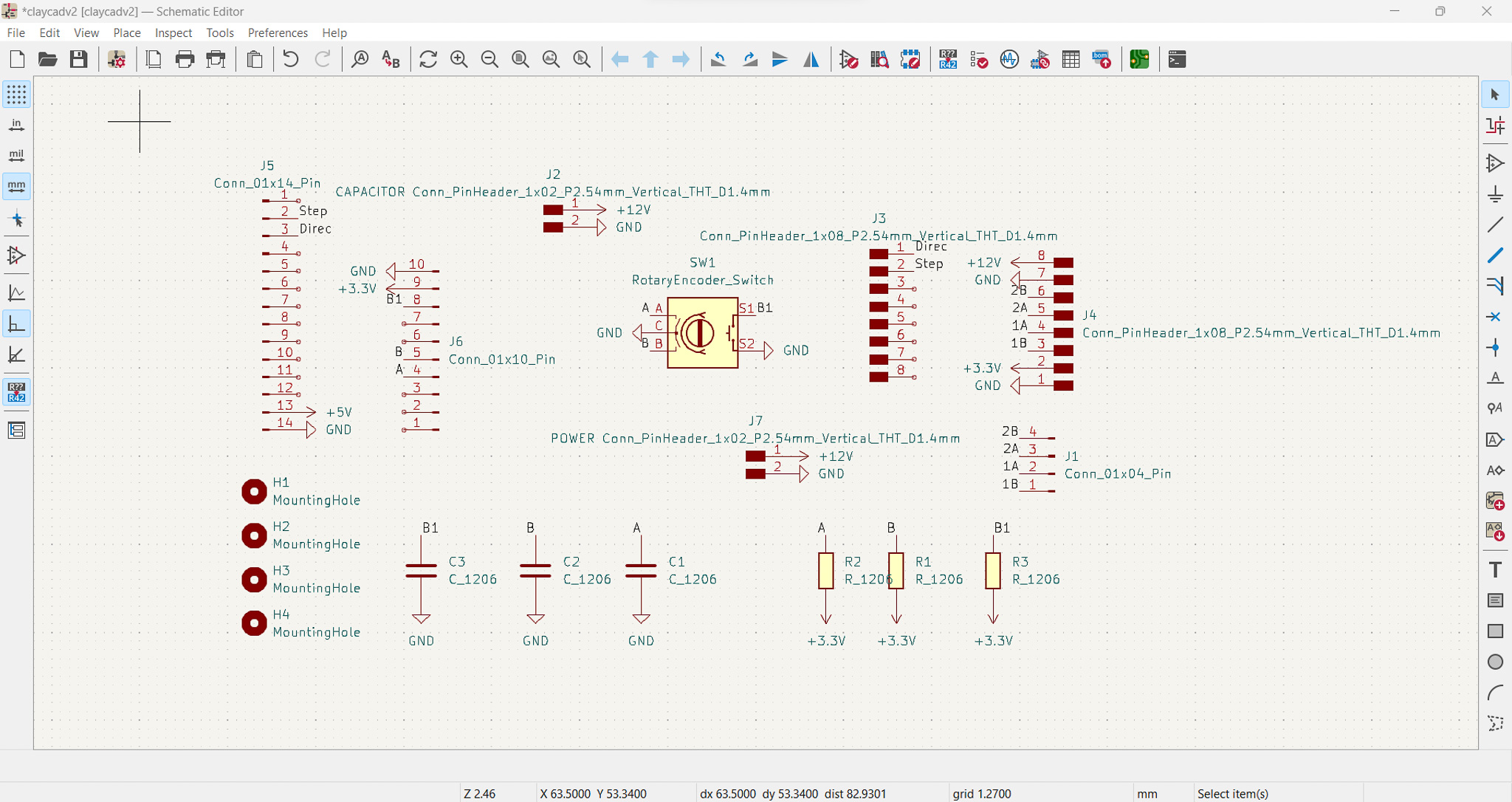
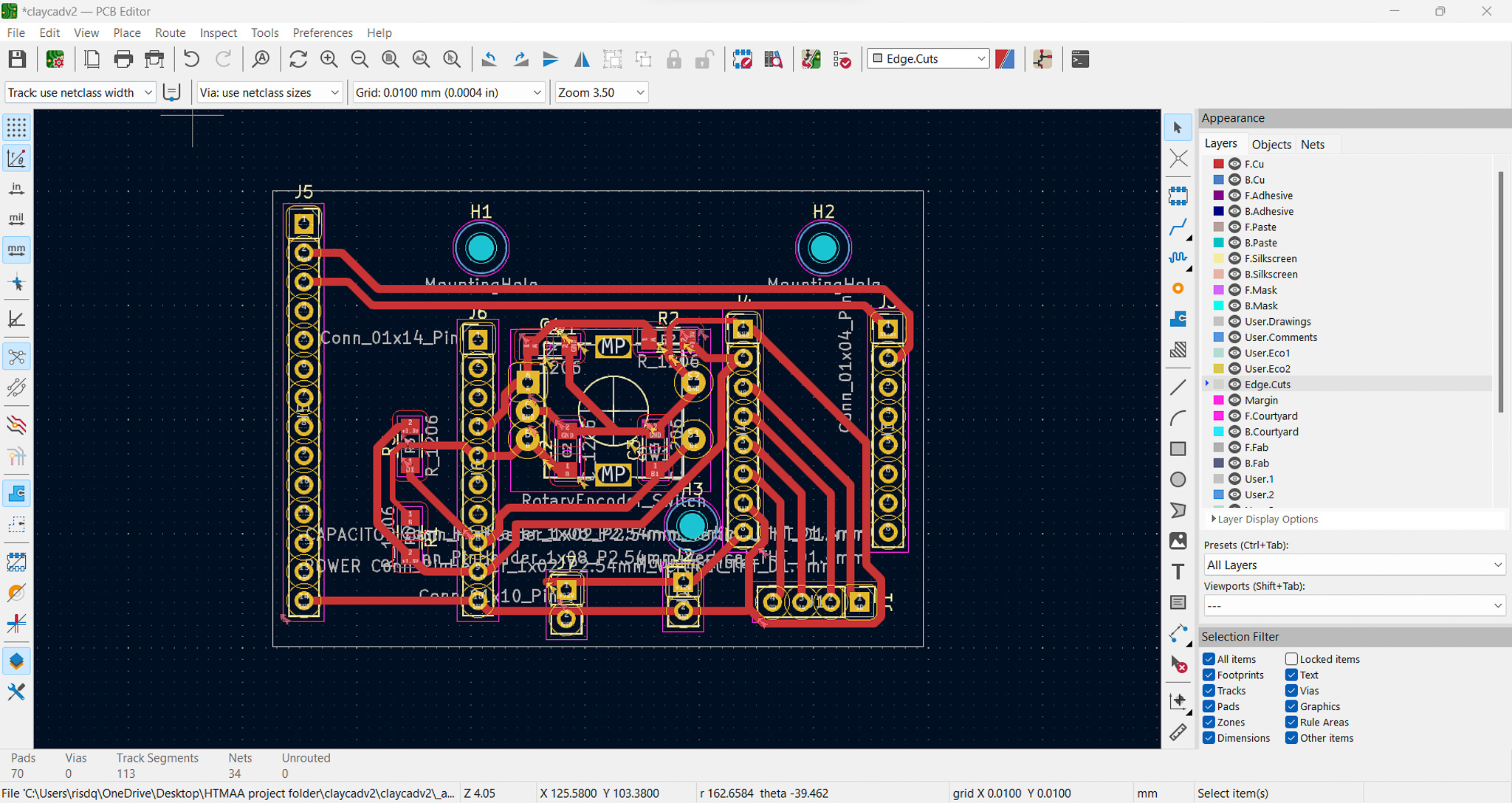
I followed the schematic and design the control PCB. For the micro controller, I am once again forced by lingdong to use his amazing collection of original break out board design for easier debuging.
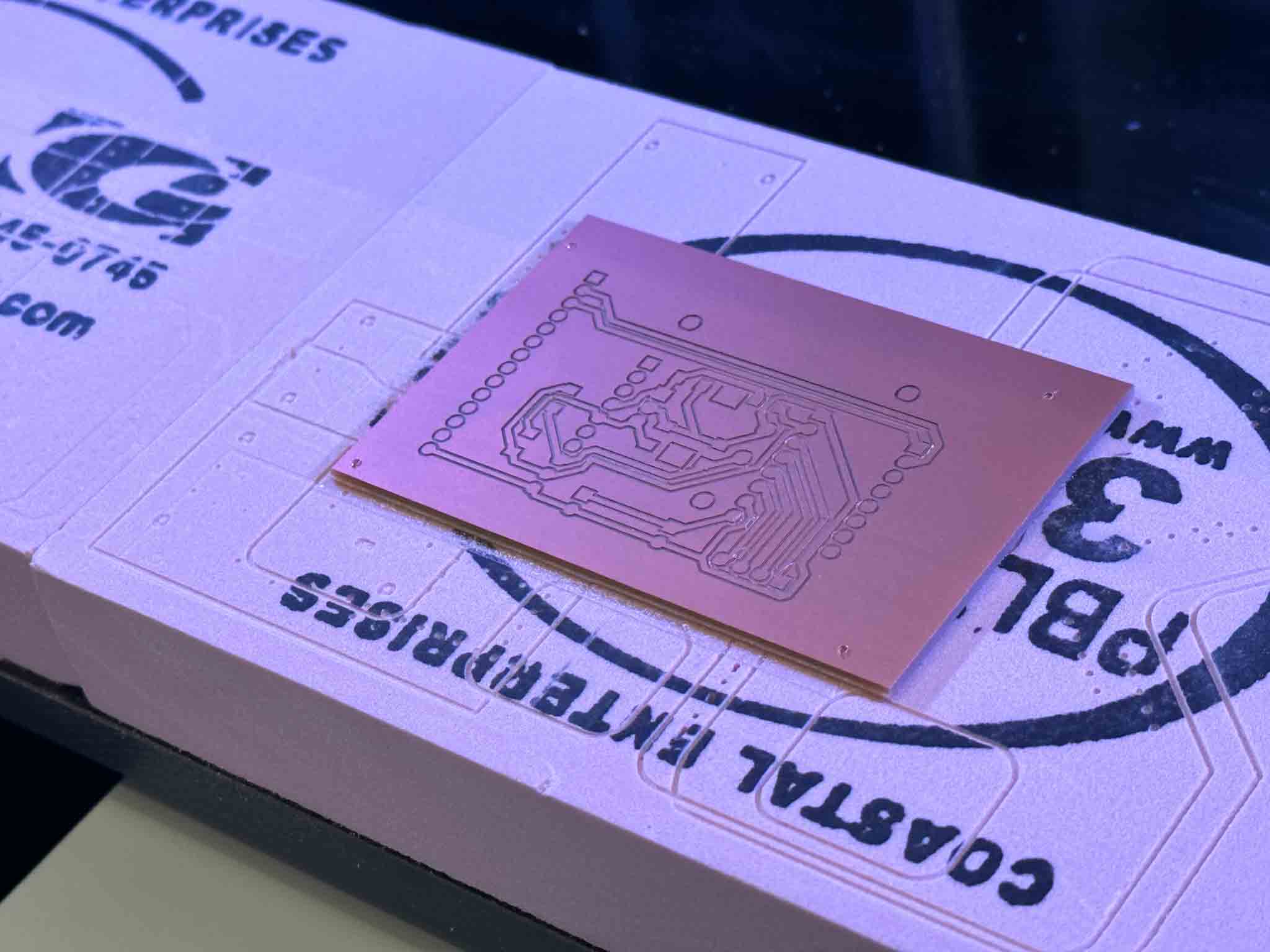
Although the inital milling was smooth and successful, I accidentally deleted a roll of through holes used to attached the breakout board. Time to mill another one.
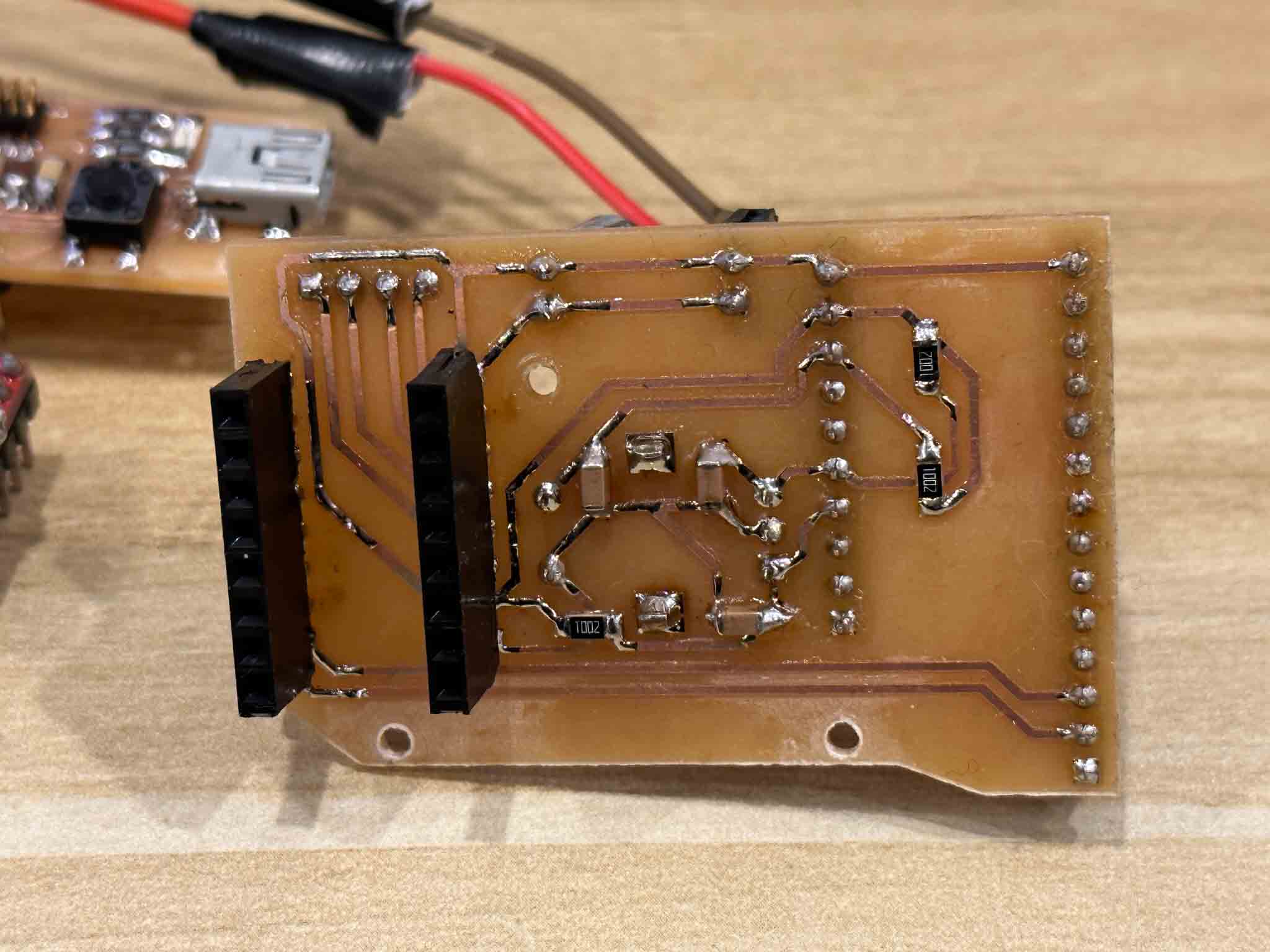
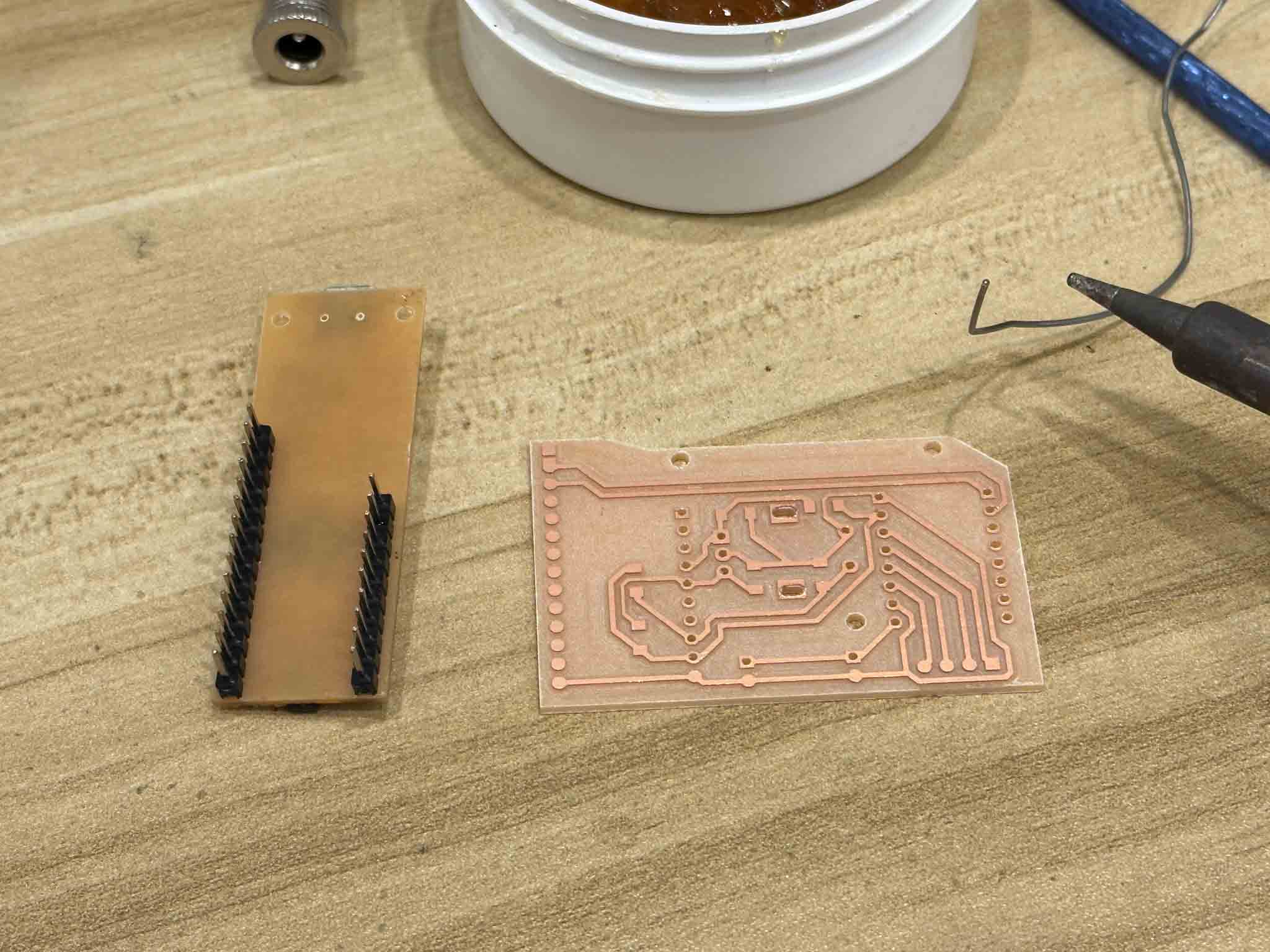
Second attempt was much smoother. The only mess up was that I forgot to flip the female headers to the other side of the pcb, but I manage to solder it on by levitating it a bit off of the copper surface.
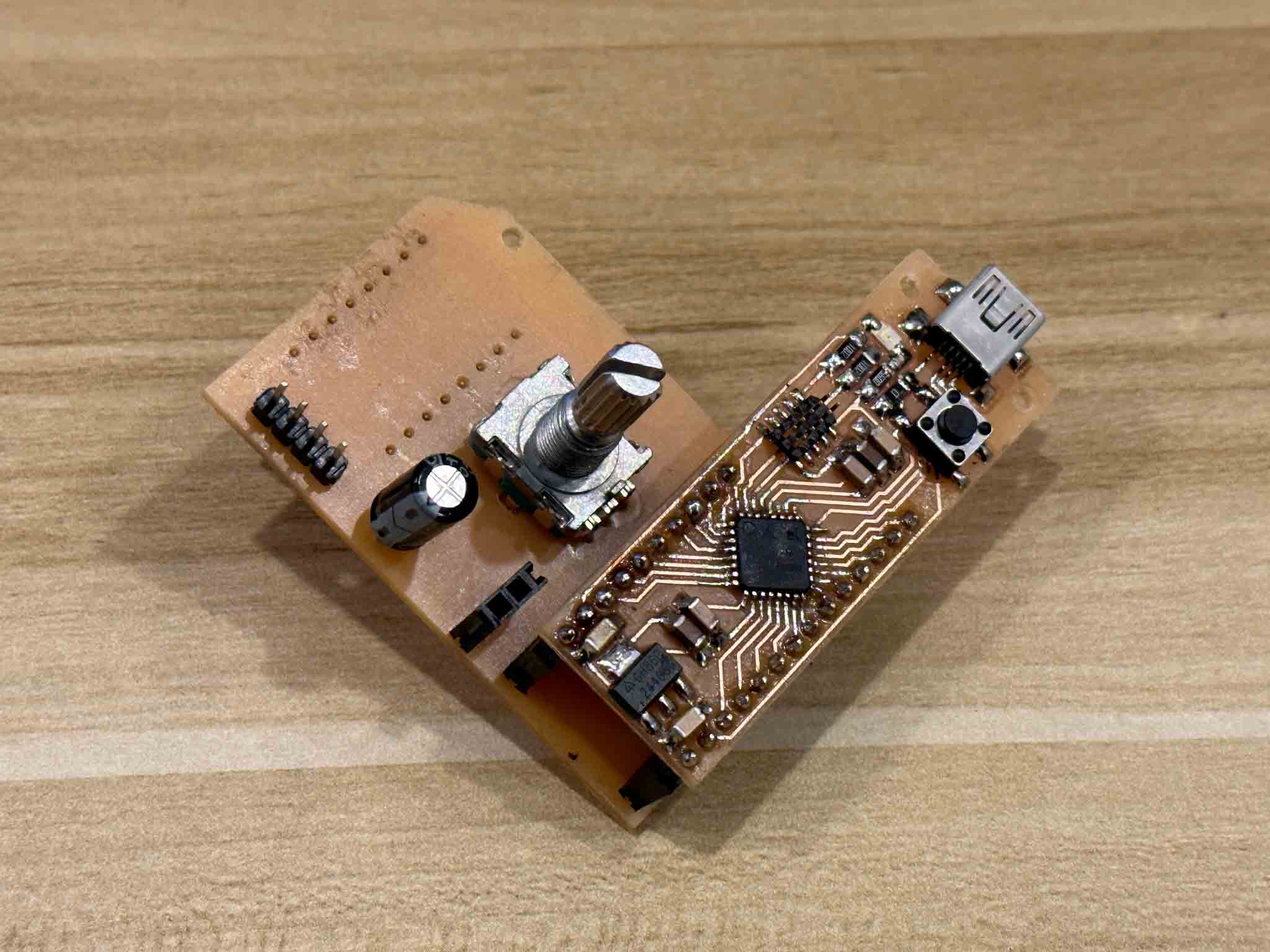
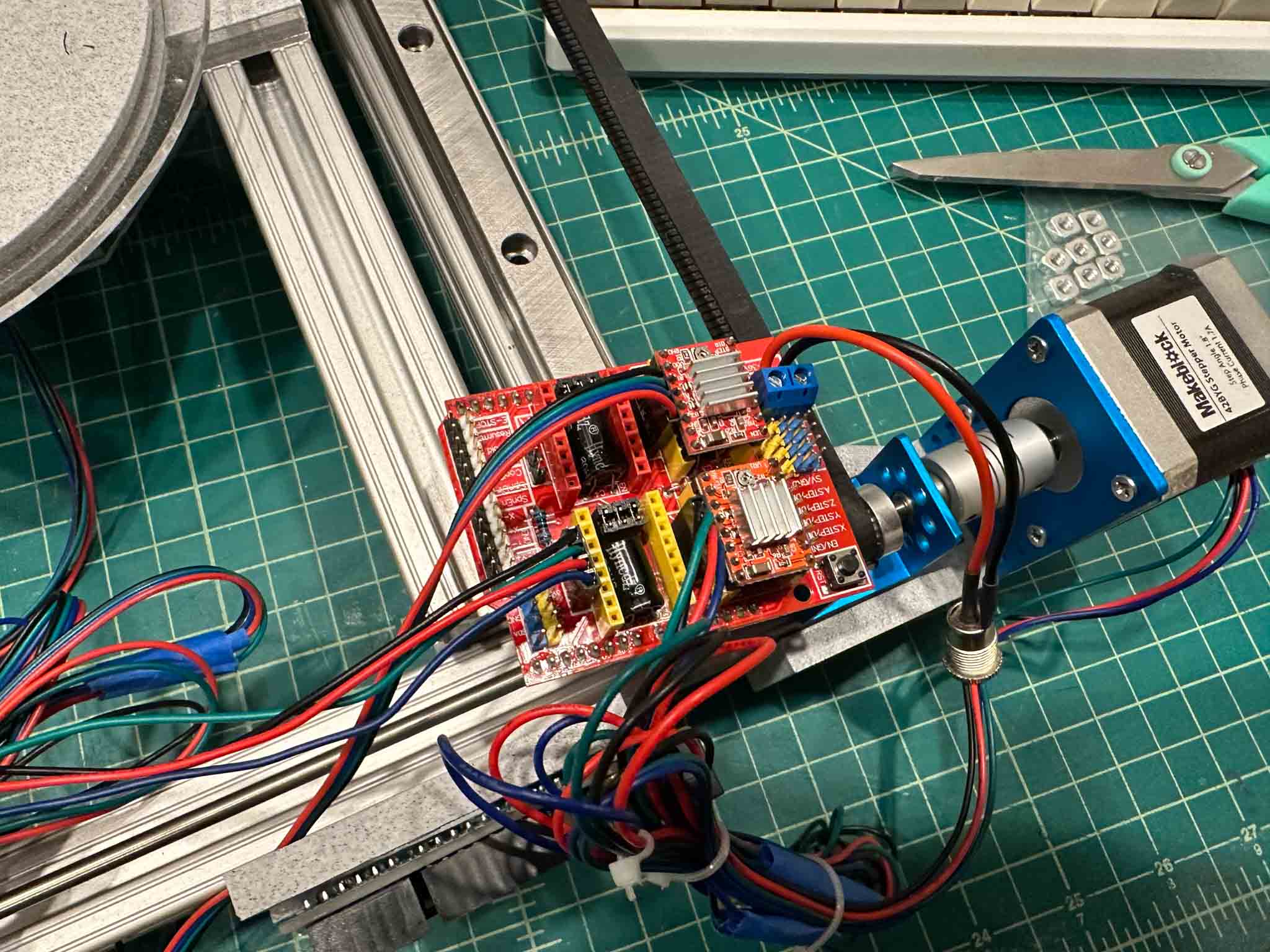
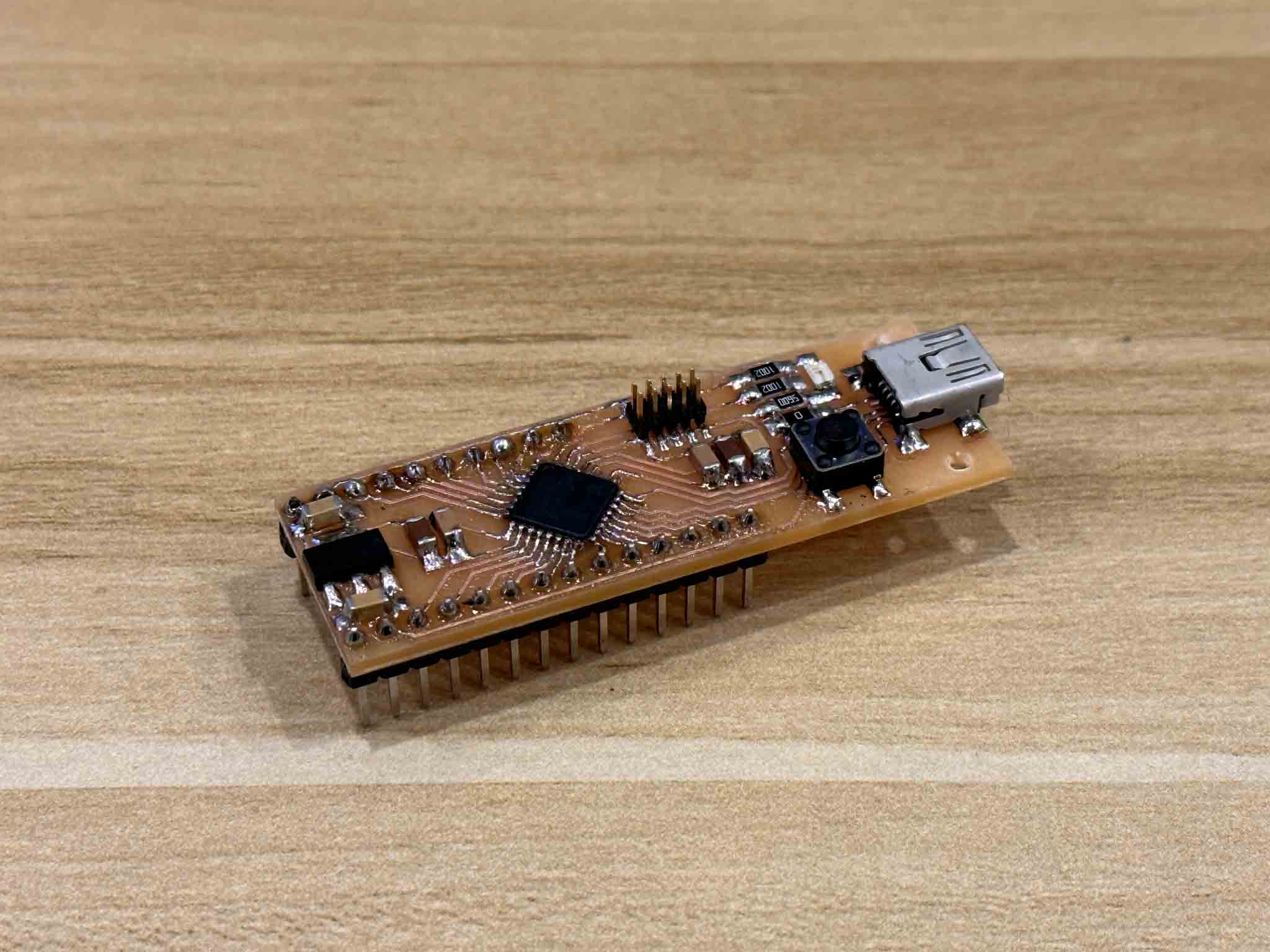
The assembled control board and microcontroller. Originally I had trouble getting the assembly to work until I went to a office hour by jake where he informed me that I have some floating pins, specifically the sleep and reset pin must be connected. After connecting the two pins, it worked as expected, here is the arduino code:
#include <Stepper.h>
#define STEPS 200
// Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver
Stepper stepper(STEPS, 19, 22); // Pin 2 connected to DIRECTION & Pin 3 connected to STEP Pin of Driver
#define motorInterfaceType 1
int Pval = 0;
int potVal = 0;
int ENC_CL = 3;
int ENC_DT = 4;
int ENC_SW = 7;
int PRV_CL = LOW;
int PRV_SW = HIGH;
int ONOFF = 0;
void setup() {
pinMode(ENC_CL, INPUT_PULLUP);
pinMode(ENC_DT, INPUT_PULLUP);
pinMode(ENC_SW, INPUT_PULLUP);
Serial.begin(9600);
// Set the maximum speed in steps per second:
stepper.setSpeed(1000);
}
void loop() {
int m = digitalRead(ENC_SW);
if (PRV_SW == LOW && m == HIGH){
Serial.print("c");
}
if (PRV_SW == HIGH && m == LOW){
Serial.print("d");
}
PRV_SW = m;
int n = digitalRead(ENC_CL);
if (PRV_CL == LOW && n == HIGH){
if (digitalRead(ENC_DT) == LOW){
Serial.print("a");
stepper.step(-100);
}else{
Serial.print("b");
stepper.step(100);
}
}
PRV_CL = n;
}
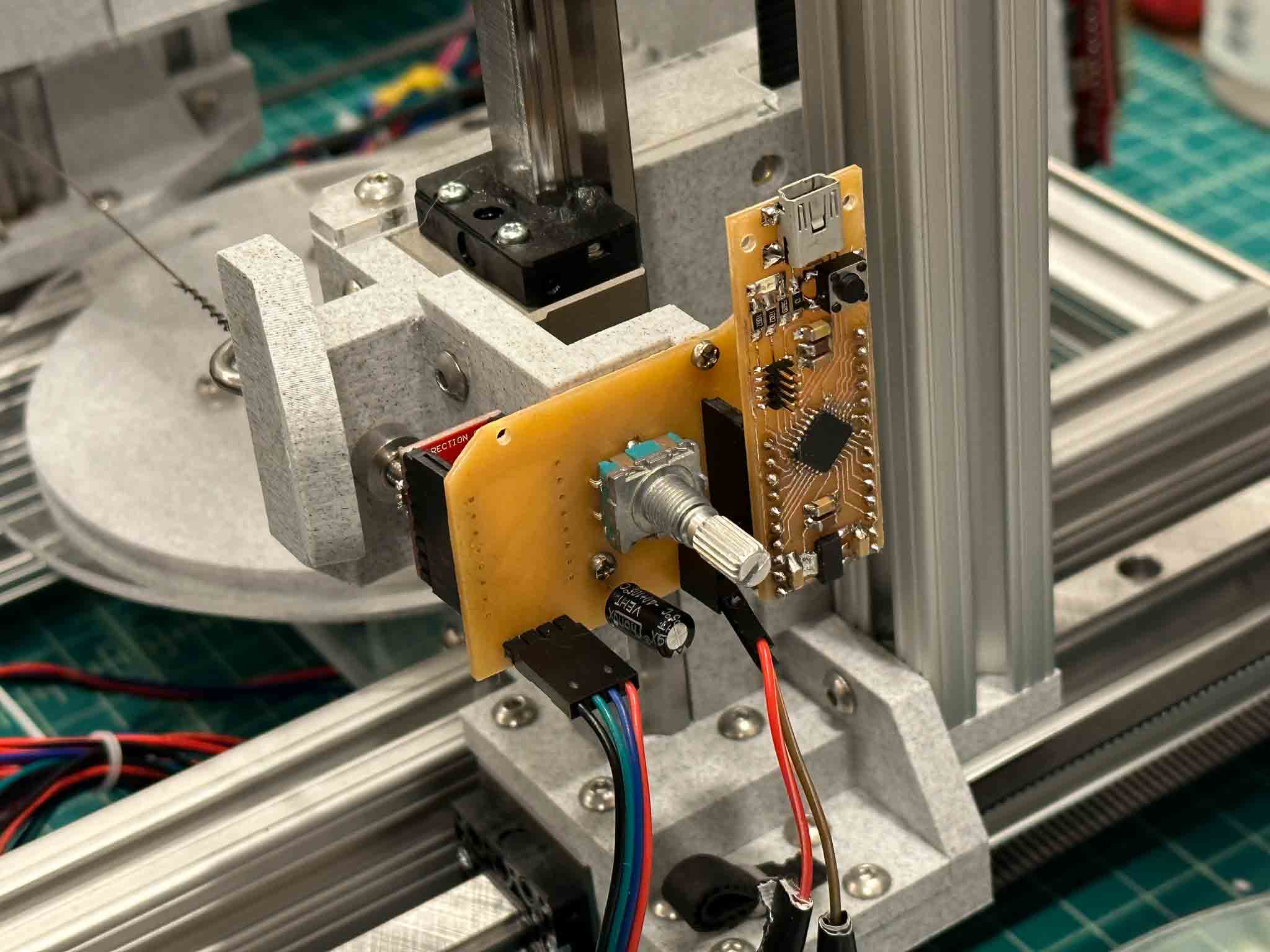
Added the module to the old prototype to test interaction ands ergonmics.
Quick test.
2:30am on a tuesday night.

TA Lingdong saving lives.

painful pcb debug is more fun together.
Prusa x6.

MDX50
Welcome any HTMAA classmates to use our space and equpiment located next to harvard GSD. We have a MDX50, 6 x prusa and a Form3 SLA printer.