Mobility concept
A possible way for Baksi to move around its little workshop.
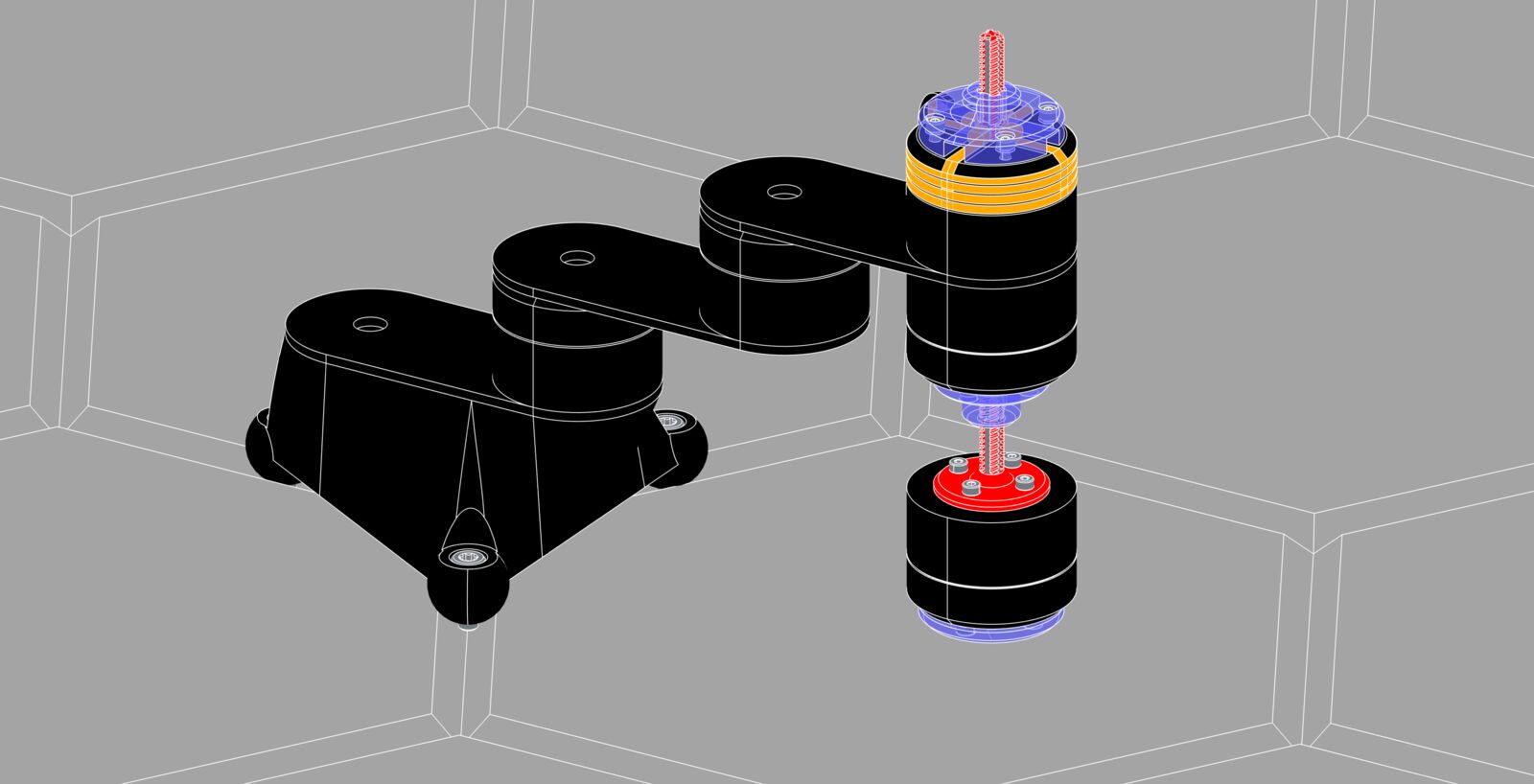
The bot is located with three balls that go into three V-shaped grooves in e.g. an MDF sheet. The bot is fastened with three bolts. If the bot needs to move, it unscrews itself and scooches to a new location.
This is also a solution to a problem that I've had with hobby robots. Every time I detach the robot, I can't reattach it in exactly the same place again, so I have to redo all the programming.
Seeing the image above, I realize that Baksi is probably too weak to fasten the screws in its own base, and it will definitely tip over while it's trying to do it.
One screw in the middle of the base might be better, with a heavily geared DC motor to attach and detach the bot from the board. I ordered these two to try out:
 According to this bolt fastening torque calculator, the tiny gearmotor on the left can give me 12-20 kg of clamping force when fastening one 3 mm bolt (if I can trust its specs). If that's not enough, then I'll try the servo on the right.
According to this bolt fastening torque calculator, the tiny gearmotor on the left can give me 12-20 kg of clamping force when fastening one 3 mm bolt (if I can trust its specs). If that's not enough, then I'll try the servo on the right.
I may also want to add recesses on the MDF board that Baksi can hang onto with a gripper tool while it lifts its base and moves it to a different spot.
Note
The mobility concept is on hold.