I'm developing a Solid Knitting Machine, a machine to create solid knitting, a layer-by-layer volumetric knitting.
So it is a "3D printer" using knitting.
My motivation behind this project is to develop a 3D printer whose prints are unravelable.
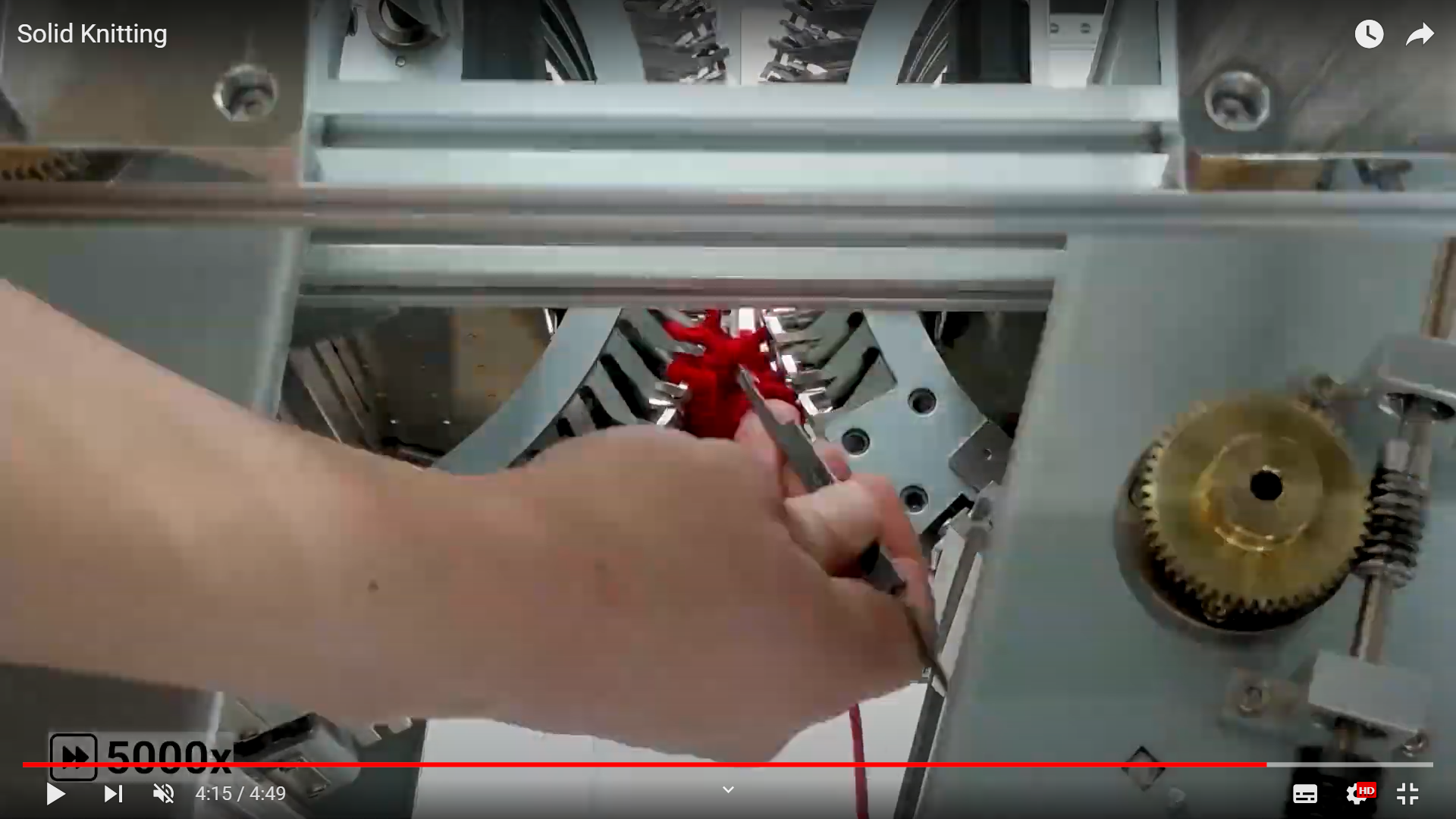
The current knitting machine prototype causes a lot of yarn entanglements, requiring frequent manual interventions.
The main issue on this is that deformation of the holder, a component to hold on loops, leading to loops shape inconsistency.
(Detailed in Section 7.1 Loop Shape Consistency of our paper)
So we need to develop a new design of the holder rigid enought to withstand the yarn tension.
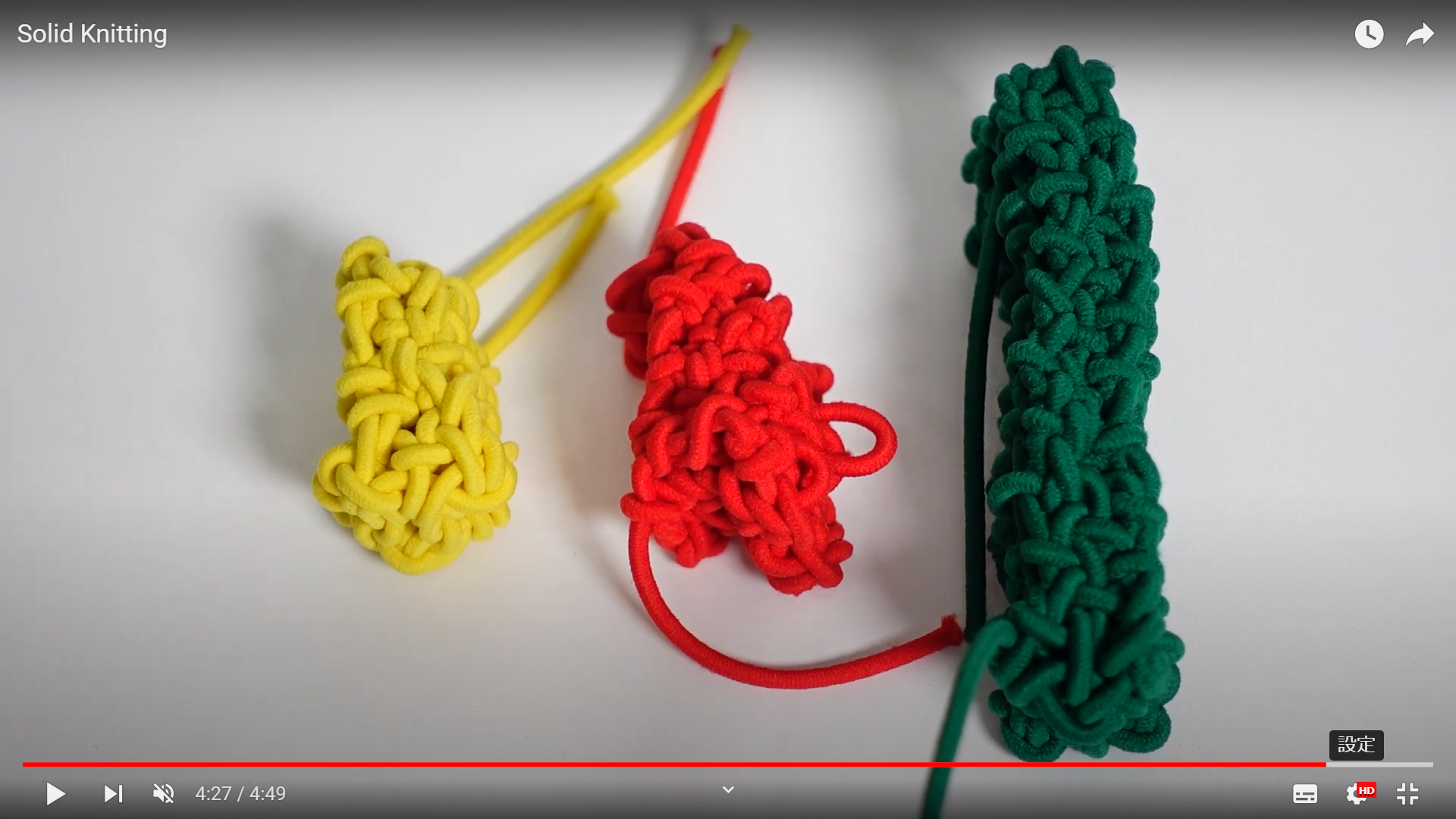
Also the current prototype only can knit these small simple shapes.
We need to enable the machine to do increase and decrease of stitches to knit more complex shapes.
(These sandals are hand-knittied.)
What I Made
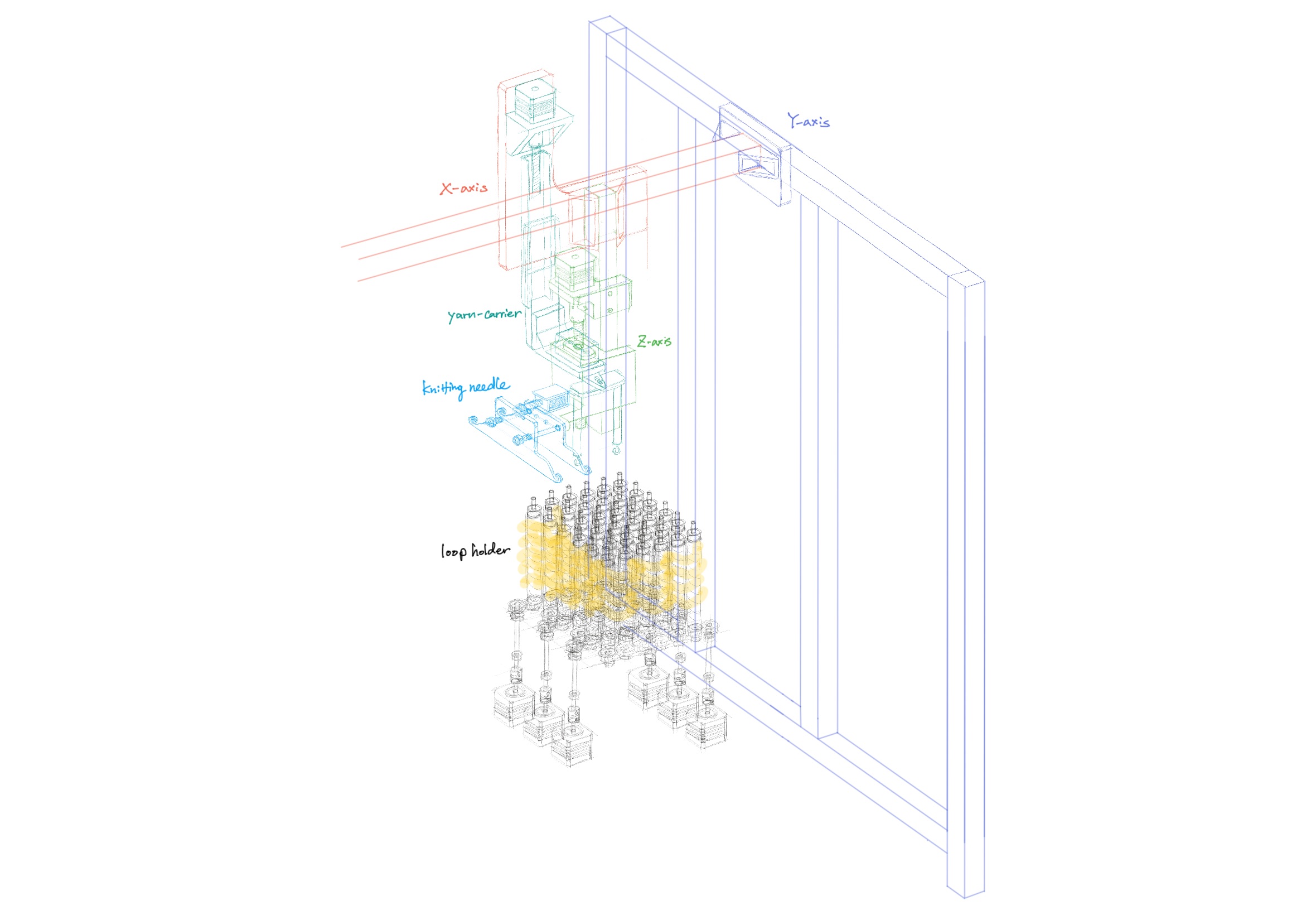
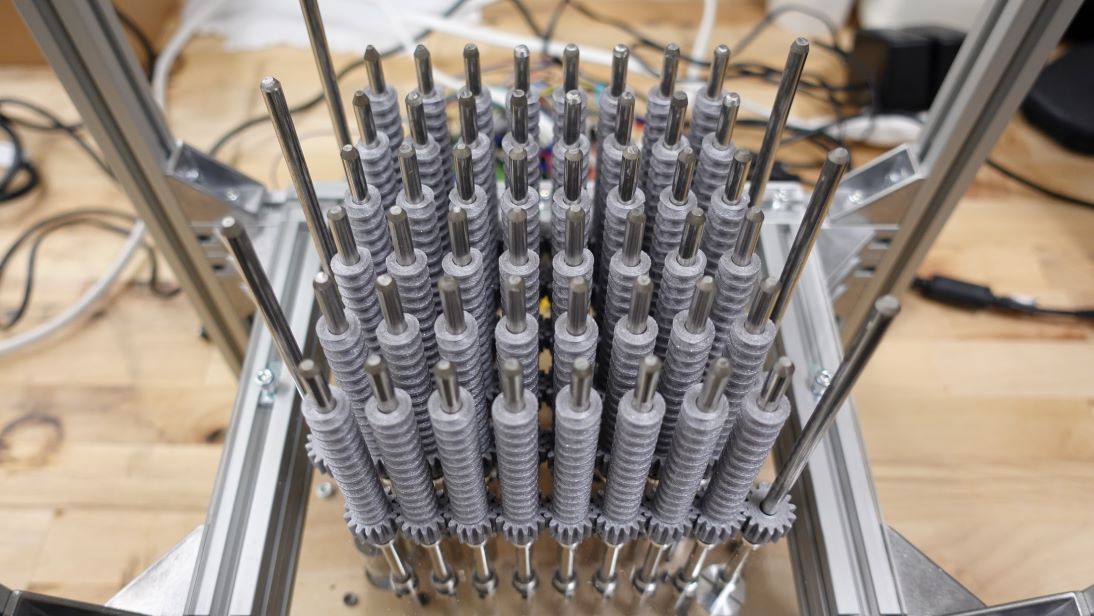
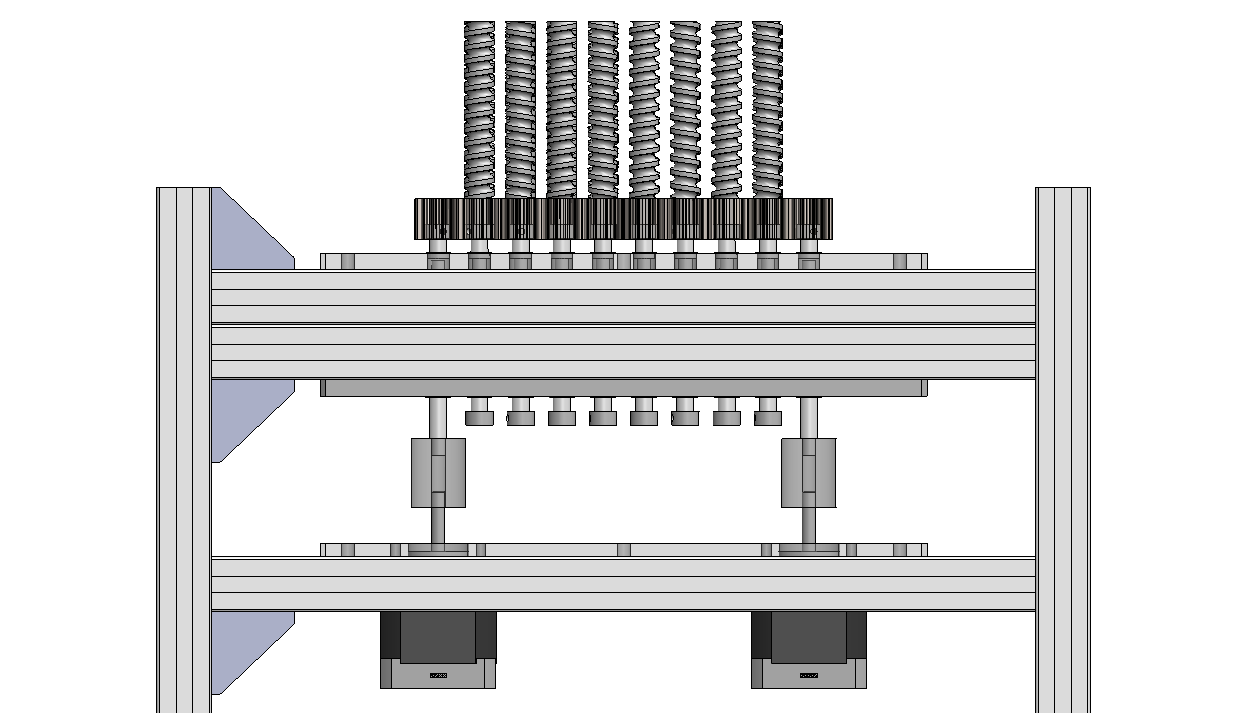
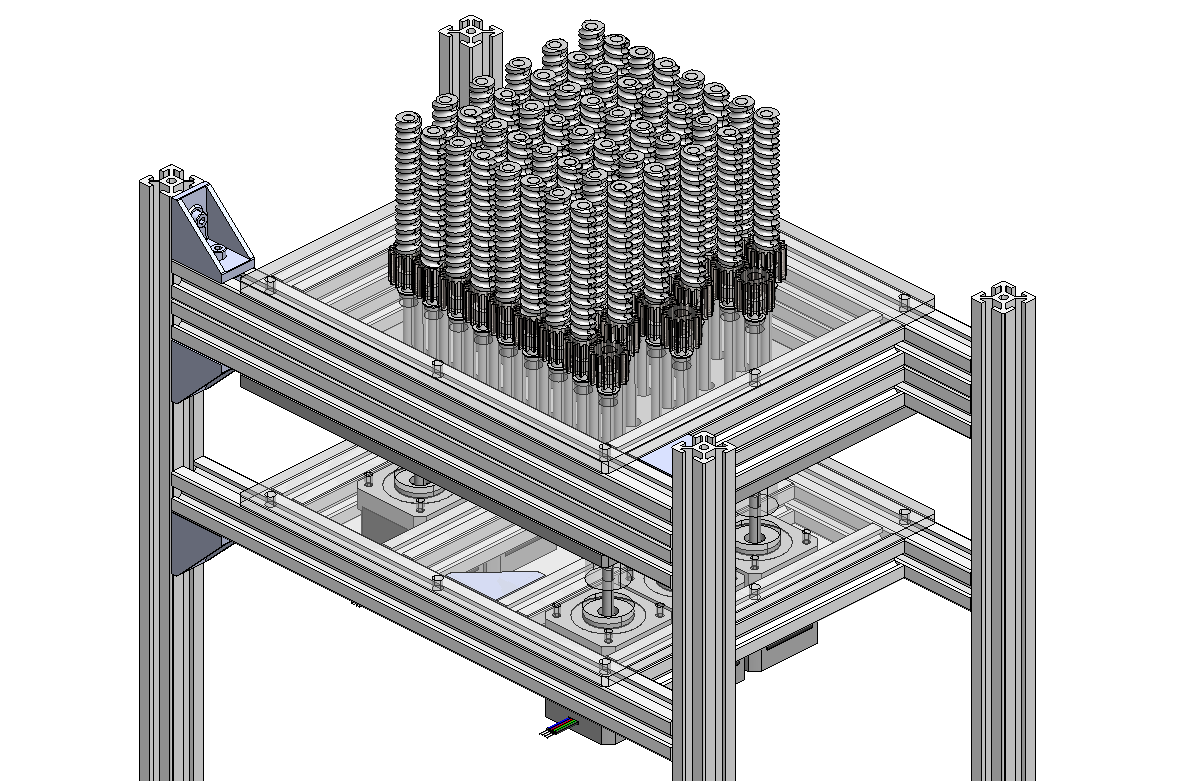
I changed the holder design from the current arched design to this "lead-screw" one, which can raise and lower loops.
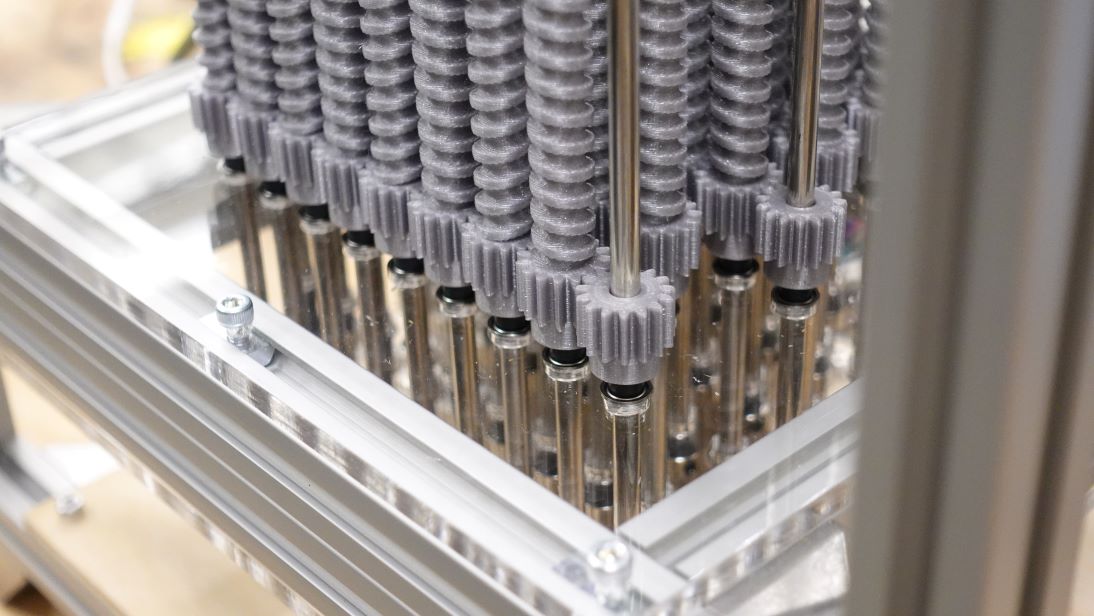
We need to raise and lower each row, but not each loop, so each row is equipped with a motor.
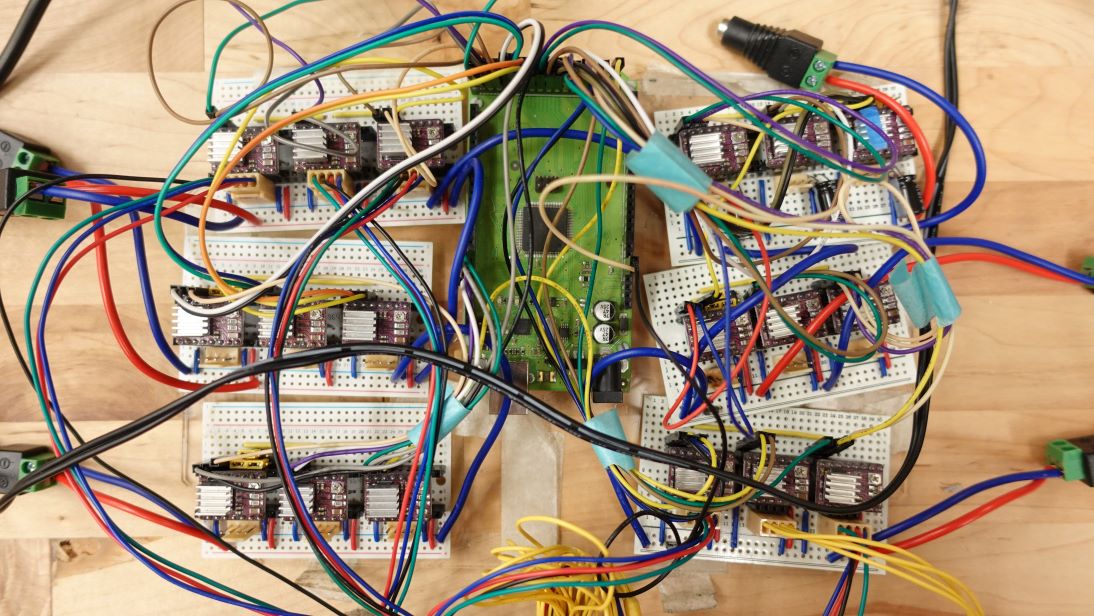
The motors are controlled by an Arduino Mega 2560 alternative (Whats Next? Green - WN00002) with DRV8825 stepper motor drivers.
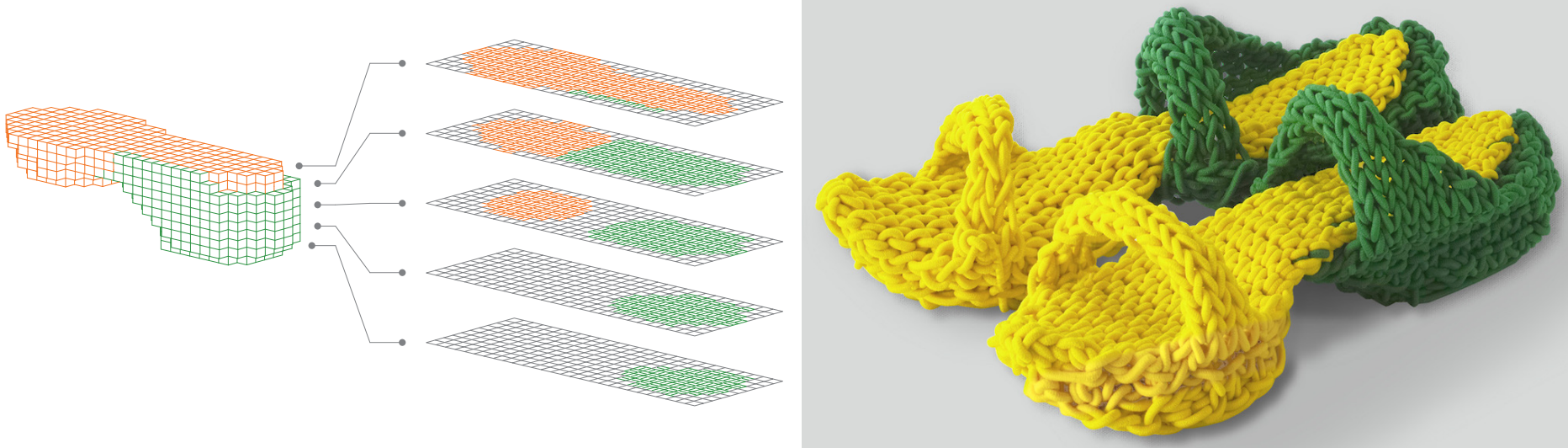
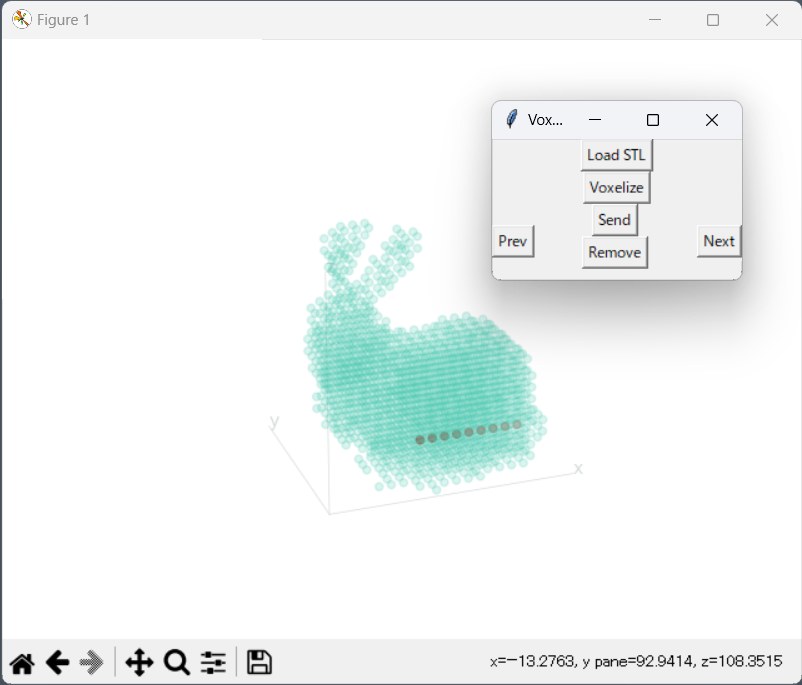
I also developed a software tool to voxelize a STL file and send a command to rotate a motor assigned to the current row.
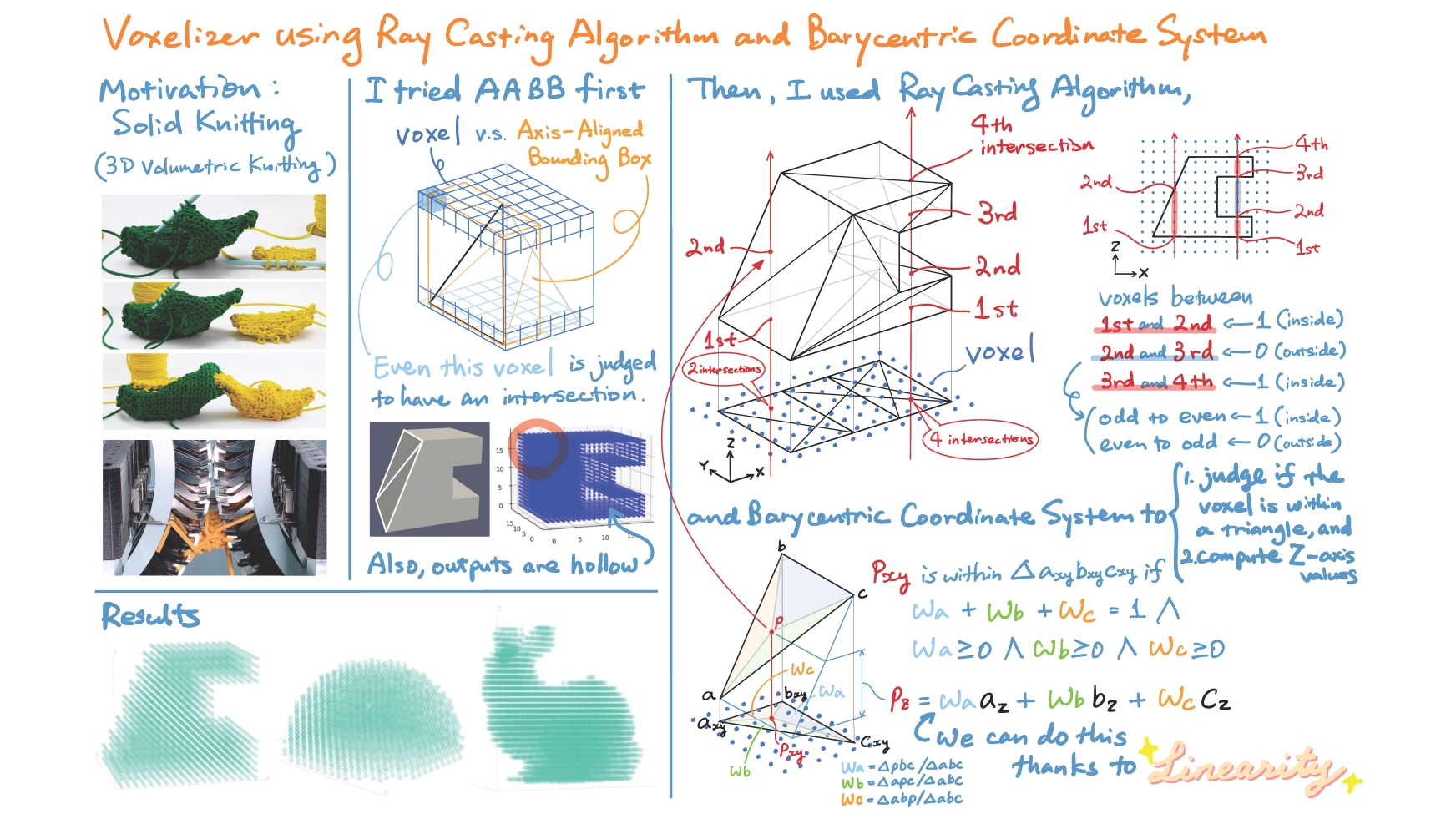
I made it by tweaking the voxelizing tool I made before using ray casting algorithm.
The python voxelizing tool and Arduino firmware are here.
Results and Future Development
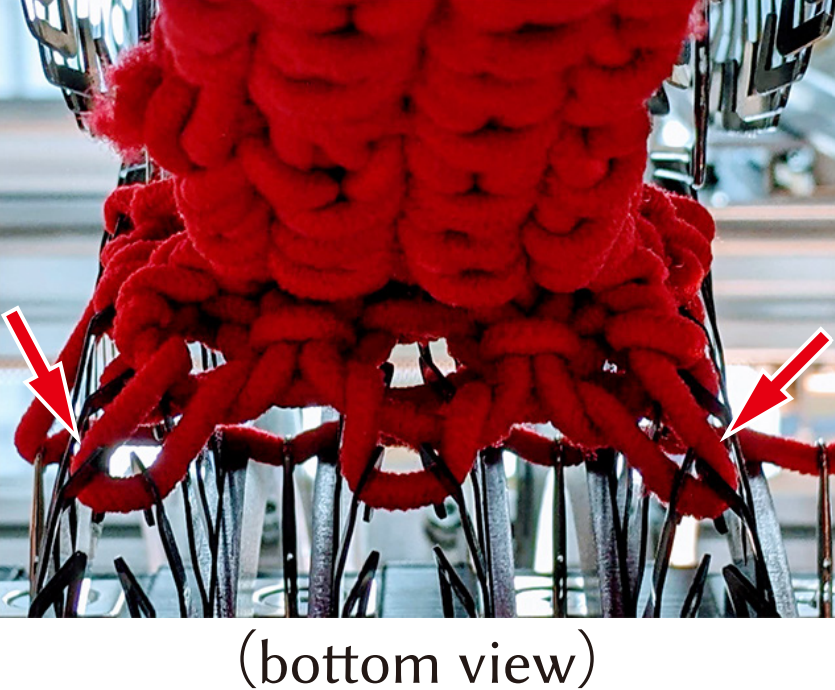
As the number of layers increased, the load became considerably larger than expected, especially on "lead-screws" in the middle, where loops from the both directions were hung.
(I rotated them half way through.)
This led to stepping out of the stepper motors. We need to add a reduction function.
Yellow: the result produced by the machine; Gray: the same structure, hand-knitted.
Also the results are very loose. This is because the machine doesn't have any tensioning function.
We need to add a mechanism that continuously pulls the yarn (elastic cord) to maintain higher tension.
At the same time, we should reconsider the design to reduce the distance between the lead screws.
This time, I only developed the holder part, not the knitting part. This is one of the future development, too.