Week 3.0: 3D Scanning
One of the objectives for this week was to learn to use the 3D scanners in the CBA Fab Lab and to 3D scan one or more objects. I was very excited about the scanning assignment, because I always wanted to be able to digitally clone everyday objects. I was even considering purchasing a 3D scanner some time ago. Therefore, this assigment seemed like the perfect opportunity to learn about and experiment with some modern (and quite expensive) 3D scanners. NextEngine and Sense were the two 3D scanners available in the shop. The design of the NextEngine made it seem superior to the Sense, so I started with the NextEngine 3D scanner first. (After trying them both, however, the Sense turned out to be the more superiod of the two.)
NextEngine 3D Scanner
 I first tried 3D scanning a golf ball on the NextEngine 3D Scanner. To learn how the scanner works and how to properly position the object, I began by experimenting with the different settings in the software. I set the resolution to medium and chose the "Bracket" setting, which scans the object from only 3 angles separated by 30 degrees. The result was not terrible but was worse that expected. But I thought at higher resolution and a 360 degree scan, I would get a much better result. Thus, after centering the object on the table as perfectly as possible, I ran a high-resolution, 360 degree scan. Several hours later, I returned to the shop and the scan was complete. I was eager to see the results, but was unpleasantly surprised. The images were not stitched properly, and several images contained no information. I tried using the options in the included software to make fixes and adjustments, but that did not help much. The scan was ultimately unsuccessful.
I first tried 3D scanning a golf ball on the NextEngine 3D Scanner. To learn how the scanner works and how to properly position the object, I began by experimenting with the different settings in the software. I set the resolution to medium and chose the "Bracket" setting, which scans the object from only 3 angles separated by 30 degrees. The result was not terrible but was worse that expected. But I thought at higher resolution and a 360 degree scan, I would get a much better result. Thus, after centering the object on the table as perfectly as possible, I ran a high-resolution, 360 degree scan. Several hours later, I returned to the shop and the scan was complete. I was eager to see the results, but was unpleasantly surprised. The images were not stitched properly, and several images contained no information. I tried using the options in the included software to make fixes and adjustments, but that did not help much. The scan was ultimately unsuccessful.
I thought perhapts the material of the golf ball is responsible for this behavior. Hence, I tried scanning a different object - a pocket book. This time, the images were stitched properly but most of them did not contain much information. Only one side of the book was scanned well. Finally, I made a third scanning attempt - an opaque plastic keychain. Result was the same as before - most of the images contained no datapoints.
Sense 3D Scanner
After my disappointment with NextEngine, I tried the Sense. There were several students in the shop at this time working on this assigment, so we first tried sanning each other. We found that the best method for scanning a person or another object is to have the Sense move around the person, while the person remains stationary. The alternative approach, where the person rotates, while the scanner is stationary did not work at all. The rason for this is that the software calculates how to stitch the different frames based on changes in the surrounding geometry. More generally, the softwre expects that the positions and orientations of all objects in a scene remain unchanged relative to one another during the scanning of the scene.. Even with this realization, however, it is still quite difficult to obtain a good scan. That is because the scanner is handheld and it is difficult to move it around an objct while keeping the object at the sencer of the scene. Moreover, keeping the motion steady is nearly impossible. It would be great if there was a platform for the scanner, such that an object is placed at the center of that platform and the scanner revolves around the object - thereby ensuring the scanner is always pointing at the object and that its motion is stable. Here is a great video showing how this can be done, and suggesting some additional tips.
What I ended up scanning with the Sense were two objects that I found in the shop - a tape holder and measuring tape.
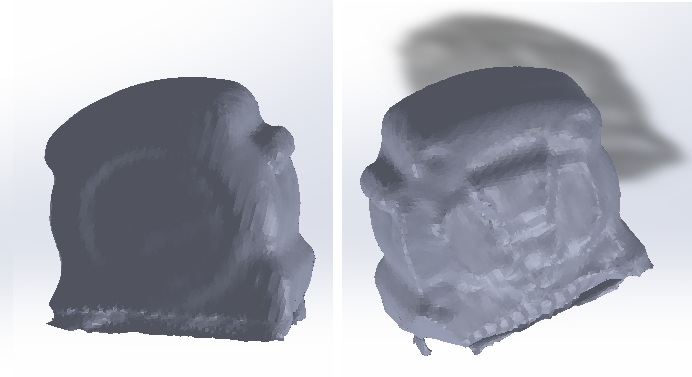
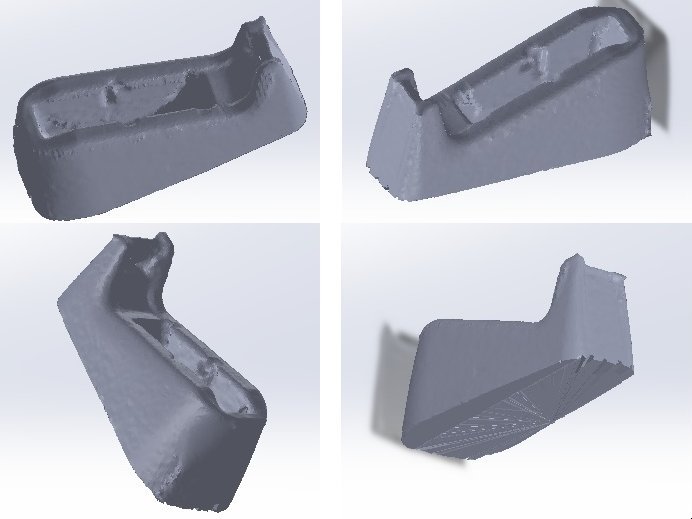
The 3D scans were not perfect and it took me several trials until I was able to achieve those results. To achieve those results, I actually had to cut a piece of cardboard using the laser cutter, tape the scanner to the cardobard, and then use the cardboard both as an aiming device and as a supporting device, while I was circling the object I was scanning.

Despite the shortcomings and difficulties, the Sense produces results orders of magnitude better in comparison to the NextEngine scanner.
My impressions about the Sense, however, were generally not positive. With a price tag of 400$ as of October 2015, it is a highly overpriced product that is not worth more than $50. It is very difficult to aim properly, since one has to look at a computer screen to determine where the sensor pints. The USB cable always gets in the way when trying to take a 360 degree scan. And it is nearly impossible to move steadily during a scan. Moreover, the software that comes with it has severe limitations. If it looses track of the posiiton of the object during a scan, it makes the user go back exactly to the last successfully scanned position AND orientation - which is nealry impossible. It does not allow images taken from different scans of the same object to be stitched together; a scan must be performed in a single session, which makes it physically impossible to scan that face of the object on which the object is resting. The software has nearly no editing capabilities, and is closed source - thus the user can only guess what are the assumptions made by the software during stitching of the images, what works best as far as background, and whether more frames result in better scans. Some of those shortcomings can easily be fixed by the manufacturer. For example, a laser pointer could be attached to the Sense to help with aiming. The device could be made wireless. And it could come with a scanning platform like the one described previously. Moreover, the software should allow a scan to be completed in multiple sessions - since it is otherwise impossible to scan all faces of an object. Only after these and other shortcomings are fixed will a $400 price tag be reasonable.