Week 13 :: Wildcard :: Robots
How do we use a robot to work on wearables?
Work conducted in collaboration with Self-Assembly Lab & Ministry of Supply.
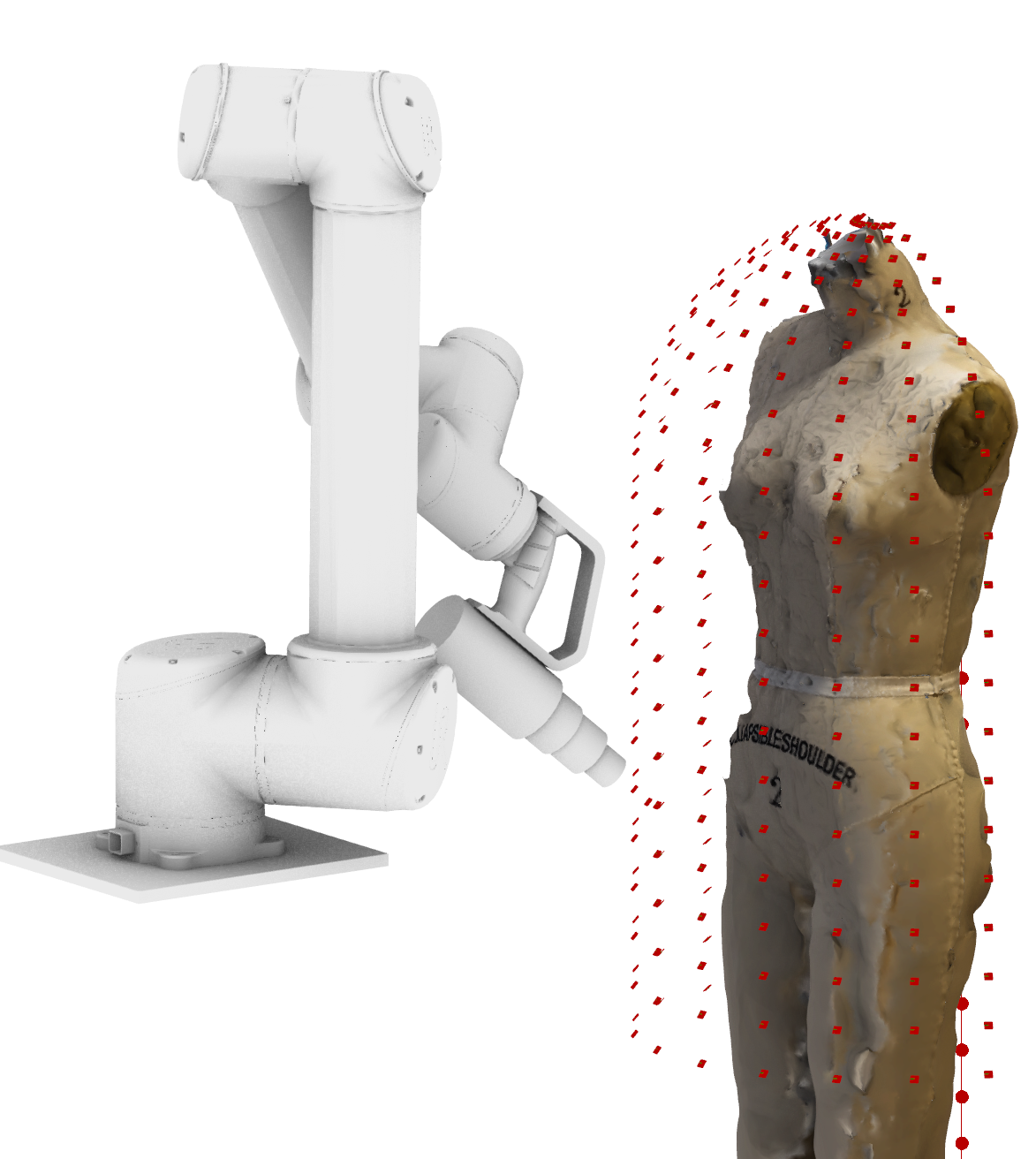 For wildcard week, I'm sharing ongoing work I'm doing the UR10 robots, to map points on a mannequin for the purpose of heat activating knit garments.
Here, you can see a 3D scan of a mannequin, with a preliminary mapping of a coordinate system around the geometry.
For wildcard week, I'm sharing ongoing work I'm doing the UR10 robots, to map points on a mannequin for the purpose of heat activating knit garments.
Here, you can see a 3D scan of a mannequin, with a preliminary mapping of a coordinate system around the geometry.
End Effector
Designing a more compact heat gun.
One of the challenges with working with this particular robot is the size of the workspace we are trying to access.
The mannequin is larger than the robot, meaning that we need to reach quite far to access all points around the mannequin.
Most commercially available heat guns are designed for manual use, meaning they have a handle sticking out as well as a lots of unnecessary plastic housing.
Starting from a Makita heat gun, we rehoused the electronics into a more compact, lightweight housing, while maintaining functionality of temperature and air flow control.
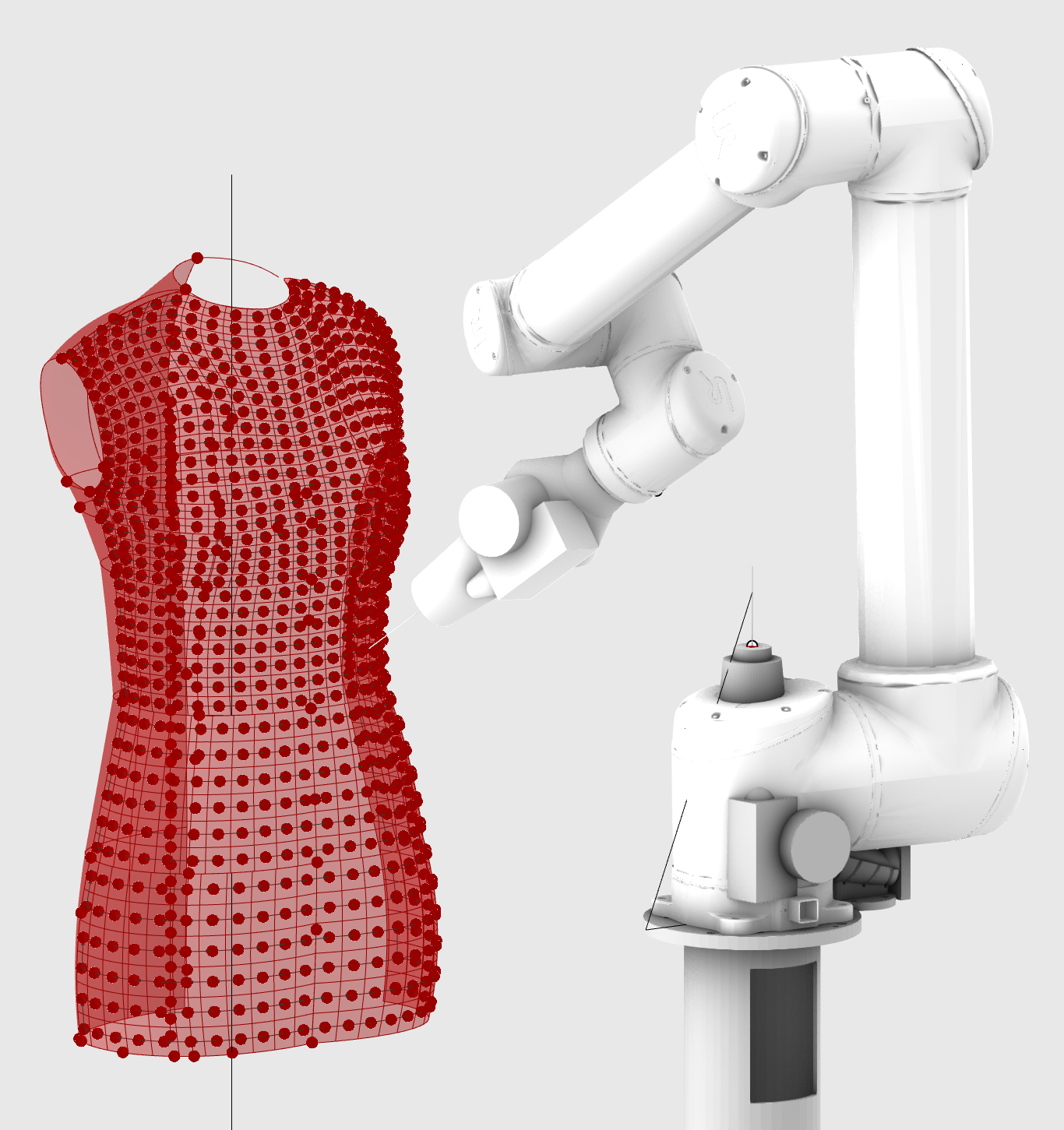 Point mapping progress.
Point mapping progress.
Heat activation is highly sensitive to time and distance. To ensure that toolpathing maintains a constant distance from the mannequin, I built a parametric digital mannequin, which could be used to calibrate the toolpathing by making minor adjustments as we performed test runs.
This experience revealed to me several of the calibration issues using complex toolpathing on body geometry.
Benchmarking and calibration becomes even more important because misalignment issues can be quite unforgiving or even dangerous.
I also learned a lot about collision avoidance and how to avoid singularities while programming with the UR10.
I think it's unlikely that I'll get the chance to incorporate robotic toolpathing into my final project within the scope of this class, but
I'll be looking for the opportunity to incorporate it into later development stages of my wearable.