Clank / FXY / Flying XY
I was planning on turning my clank machine platform into a real workhorse this term - and it’s close at hand, but I’ve taken a detour to re-design the mid-size / tall aspect ratio machine spec. That ‘spec’ is -fxy, for Flying XY - which we’ll see later.
Clank the Platform
To review - though I’m not sure I’ve said this out loud very often - the clank project wants to be a reliable reference design for almost any process at what I would call the “small / macro” length scale: between 10 and 500mm, where I would wager some ~ 70% of our everyday objects reside.
At this length scale the relaxed “FDM print everything and buy some aluminum extrusions” approach serves pretty well - especially when we do stuff like pay attention to kinematics and preload - something I wrote about a little bit in the mechanical lecture for this class here and here. The approach is worth its weight because it means we can keep BOM costs small, and machine overhead very small (one printer, one miter saw) - ideally this means lots of novices can get into machine building.
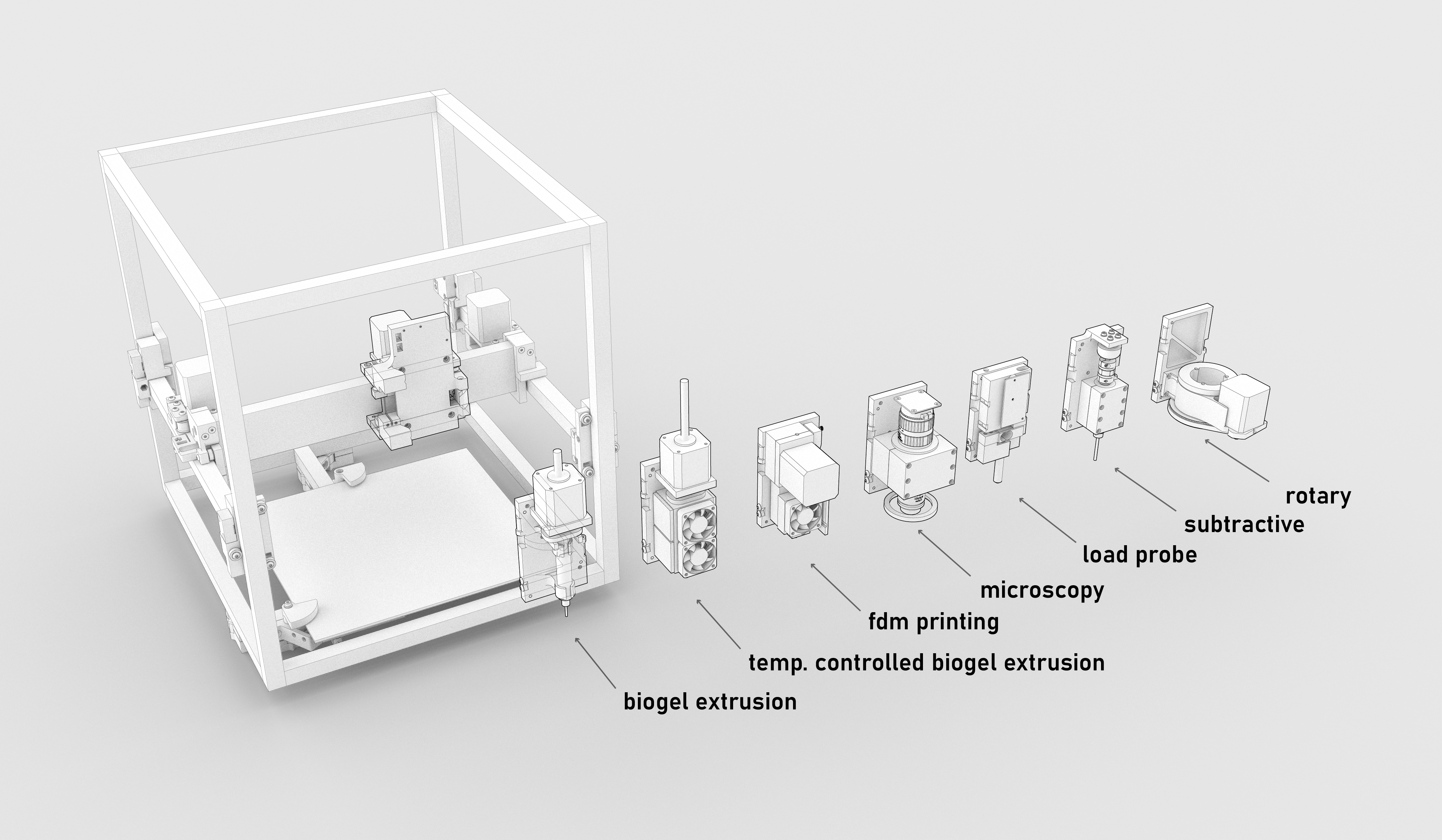
Clank and the hotplate project go hand in hand, the idea is that we will be able to do this:
This is similar to what Joshua Vasquez’ toolchanging Jubilee here and here - but is (1) easier to manufacture (no machining, anywhere) and (2) is - wait for it - a little bit bigger, and a little bit stiffer.
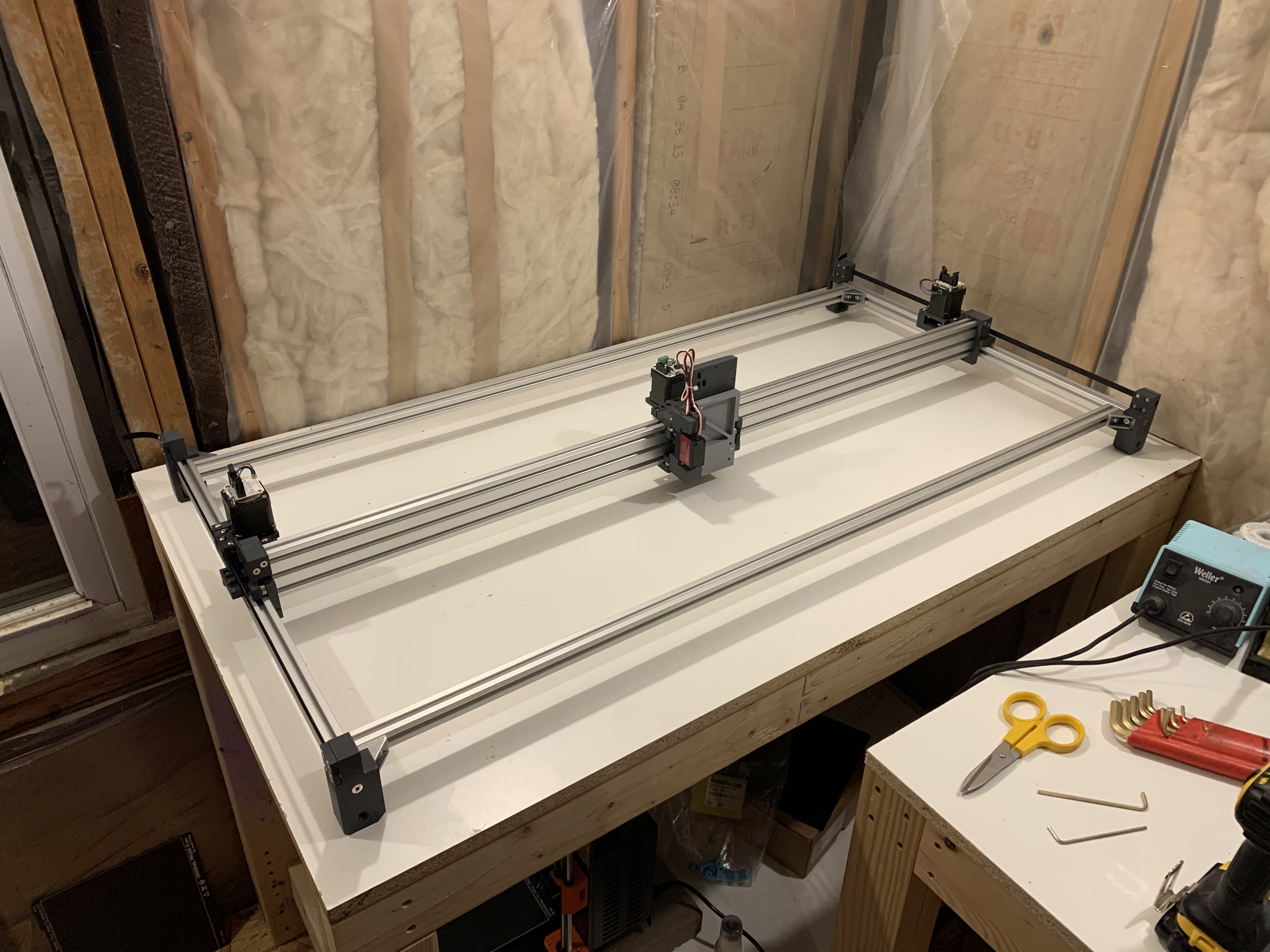
Clank includes the ‘tall’ fxy above and the ‘stretch’ version below:
Big Z Struggles
Machine designers will tell you that the Z axis is often the most painful - if we fit it ‘last’ (meaning it is attached to the x axis, a-la most 4x8’ CNCs) we are challenged to make it small and lightweight (increasing acceleration rates) but are sometimes left with serious ‘diving boards’ - large cantilevers between the tool load and the rest of the motion platform, bringing big abbe error to the party. If we fit it ‘first’ (meaning the bed moves, as in many 3D printers), we are challenged by fairly complex mechanism to ‘lift’ a wide aspect ratio bed cleanly - we can consider the alignment issue.
My previous design for a ‘tall’ clank used a cantilevered Z axis, like this:
This simplifies drive (one motor) but I found it lacking in stiffness, and even with a reduction on the Z motor, not enough holding torque - meaning there were dropouts whenever the motor would stall. We could counter this with closed loop controllers everywhere, but the mechanical complexity hardly seemed worth it.
See the drop around ~ 2:54:
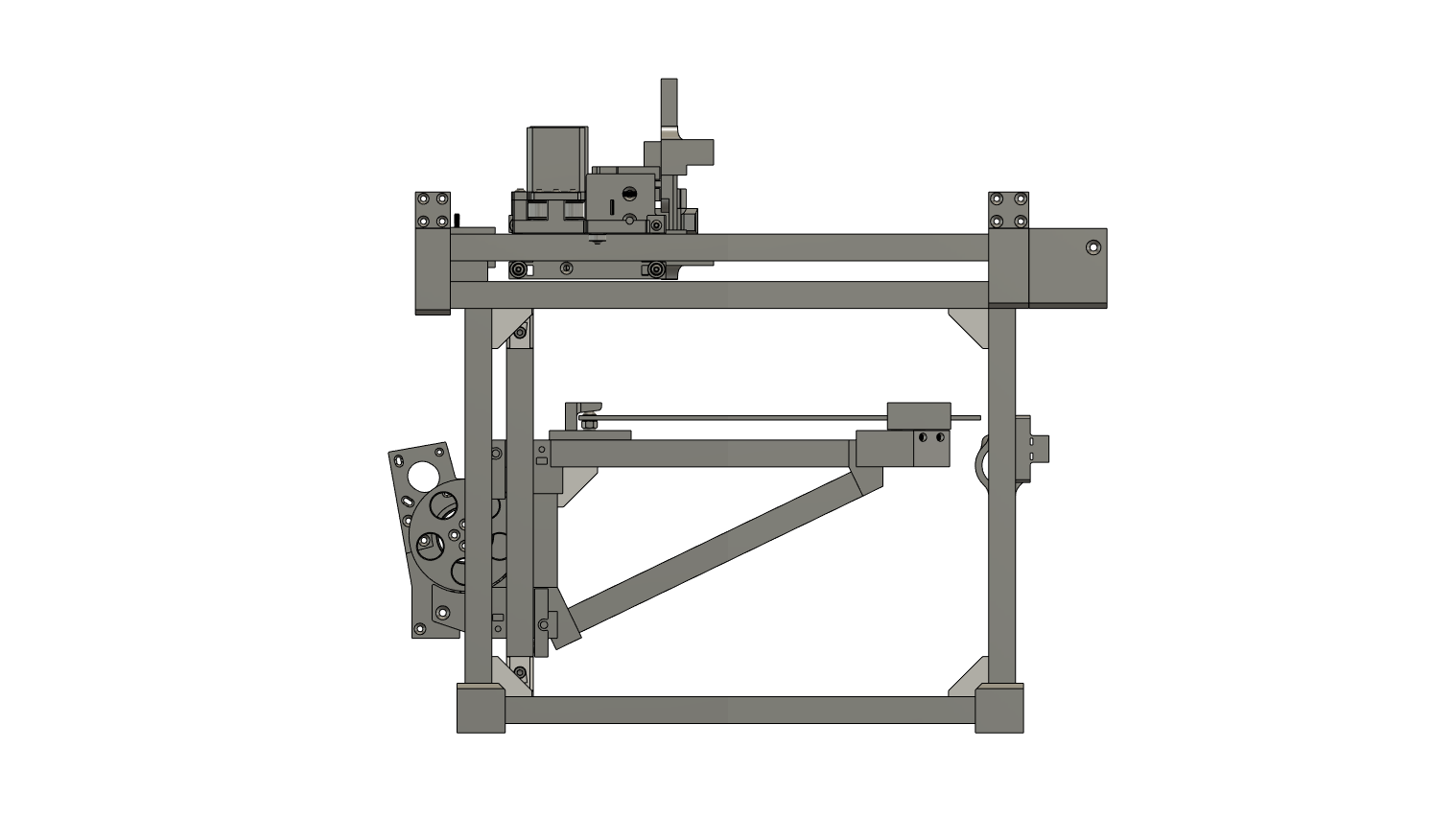
This was for sure the biggest issue - on a power-down event, or motor stall, the failure is fairly violent. Since I would like the same machine to also handle i.e. milling fixtures (a vaccuum chuck) in the future, likely increasing bed weight, I went through (and am still doing) a redesign of the z structure, to instead lift the whole XY stage.
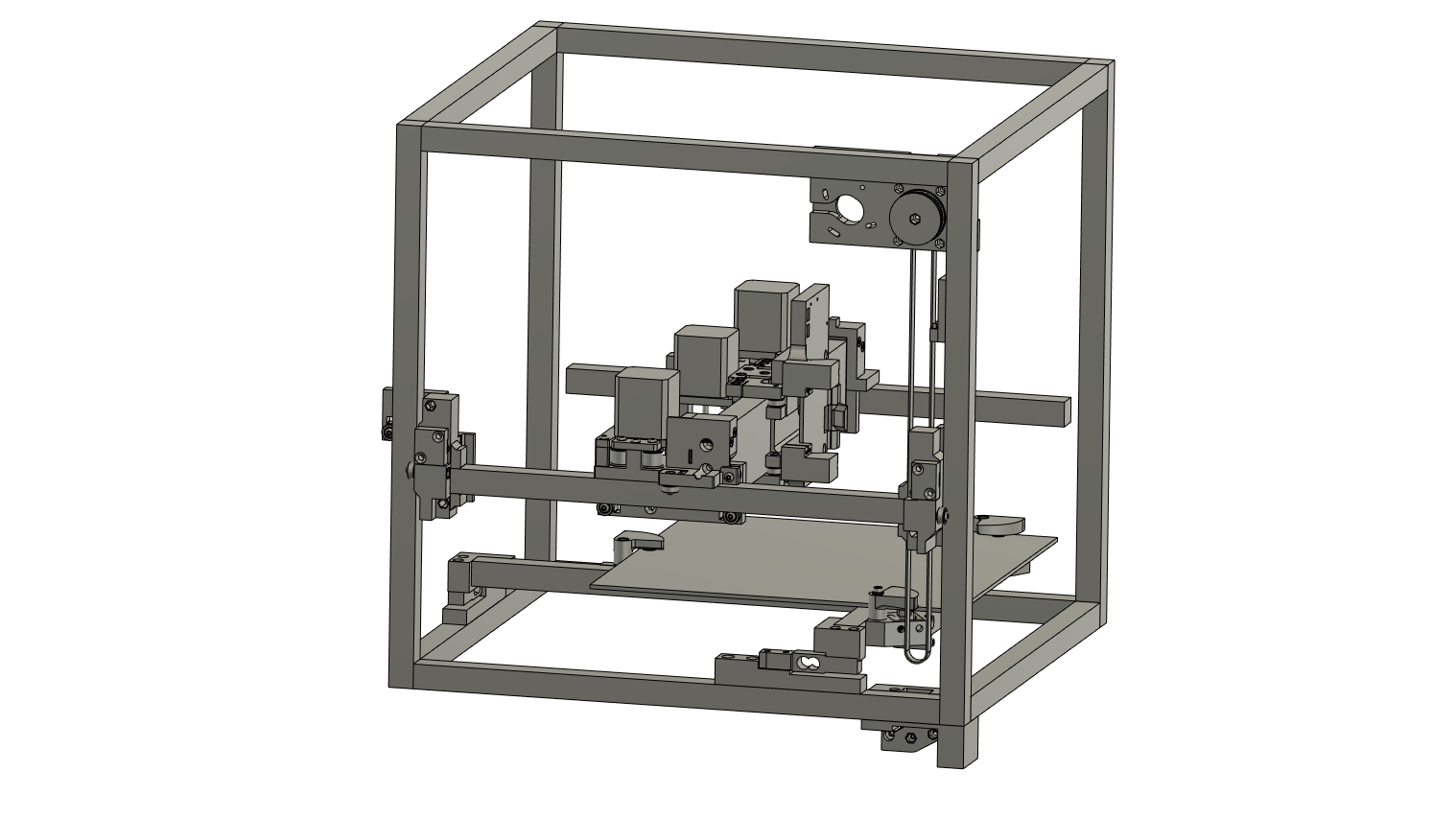
So this new design lifts each corner of the Y rails on four z motors - meaning we have lots of power available to haul it around and because the whole thing is handled well kinematically, we actually have an extra 2 DOF (and one spare) to adjust A/B tramming: the angular relationship between the tool and the bed.
This is very much in progress, and I have a laundry list of items before it’s up to spec and work-horsing:
- complete latest adjustments to design
- complete bed kinematic stage for swappable fixture / print bed
- design / build tool ‘posts’ (hang-up when not in use)
- controller update to include tramming capability, automatic bed levelling and homing
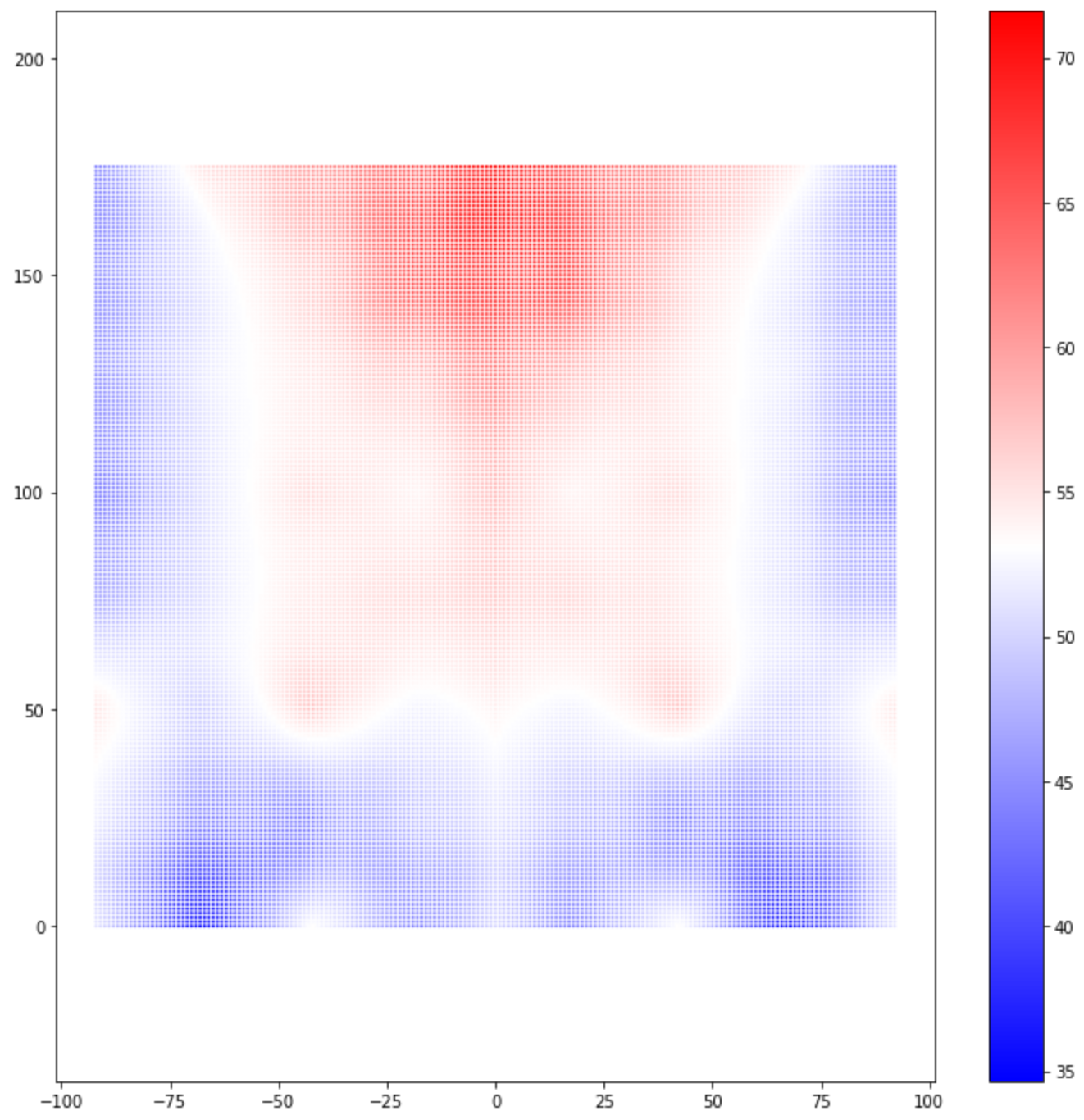
A large advantage to this is that I can mount the bed on loadcells, meaning regardless of the tool design I can extract some load data during whichever process. I have done this once to build a bed stiffness map:
Carrying on, the project wants lots of tools: hotends, spindles, probes, cameras, etc. I also want to include a pogo-pin connector at the toolchanger that will allow a networked connection to modular tool electronics. The bus I am using tolerates hot-plugging, which means this is possible.
Plan is to stabilize designs on -fxy and -stretch through the summer, and bring the toolchanger / pogo pin / bus design so that I can carry through next year with development of tools and processes on the machine. This will teach us something about the difficulties of approaching heterogeneous digital fabrication processes on a single machine platform, and will give us a platform to learn about all kind of process control questions / automatic calibrations / etc.