Collaborative Path Planning
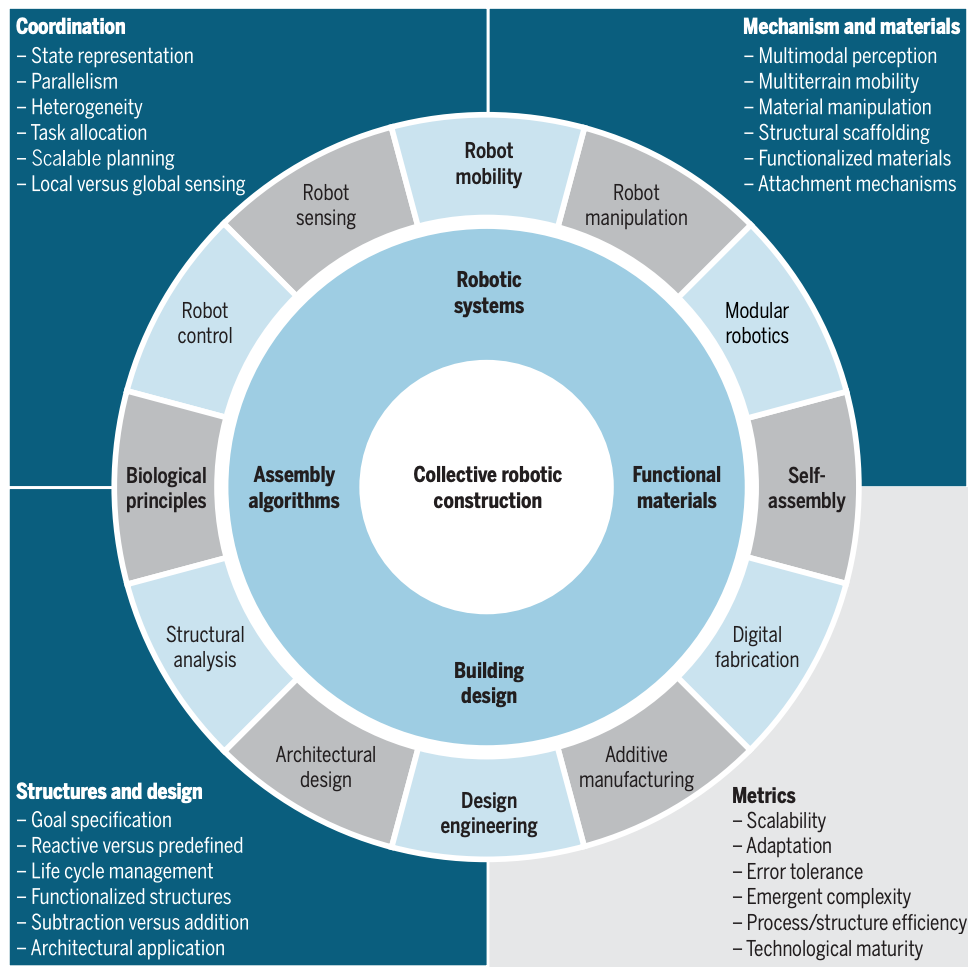
- “A review of collective robotic construction” is great introductory article about collective robotic construction and path planning, the following image is from the paper and summarizes how collective robotic construction depends on and is at the intersection of many other fields:
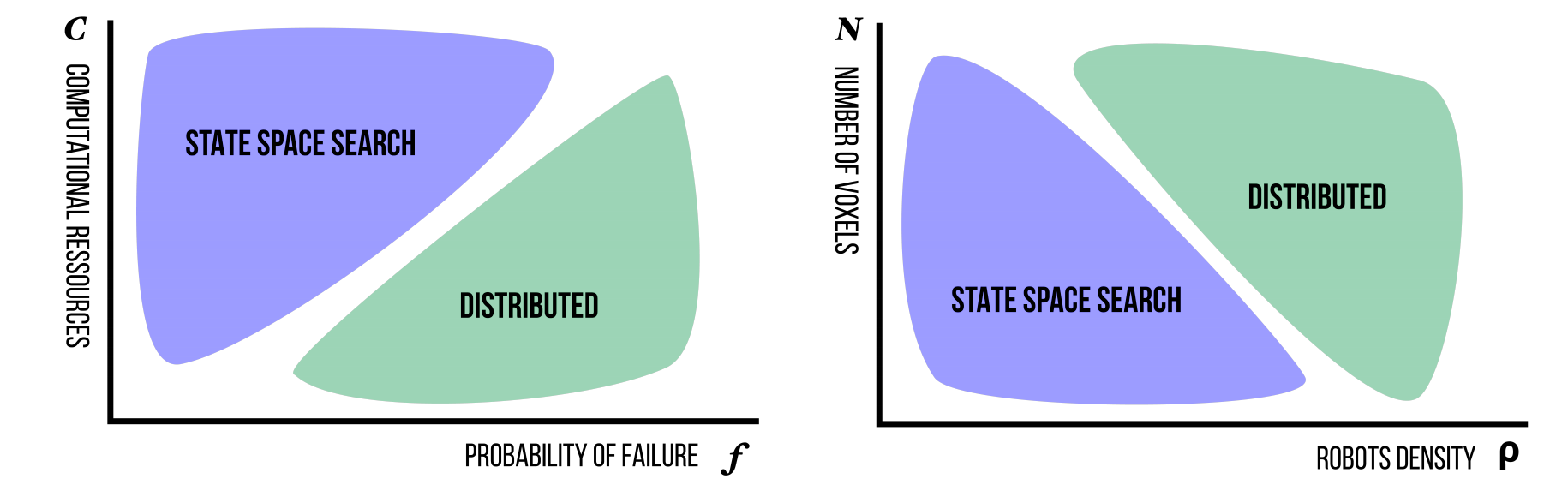
- One of the key decisions when designing a collaborative/swarm construction system is whether centralized or distributed control will be used for the path planning. In the paper “Algorithmic Approaches to Reconfigurable Assembly Systems” there is a comparison between two approaches and the following chart summarizes when each approach is advantageous. Centralized algorithms work best for smaller systems, when there is very low probability of failure, or when accuracy/speed is crucial therefore there is a need for large central computational resources to optimize the process. However, for larger systems, distributed approaches will be cheaper, scalable and more fault tolerant.
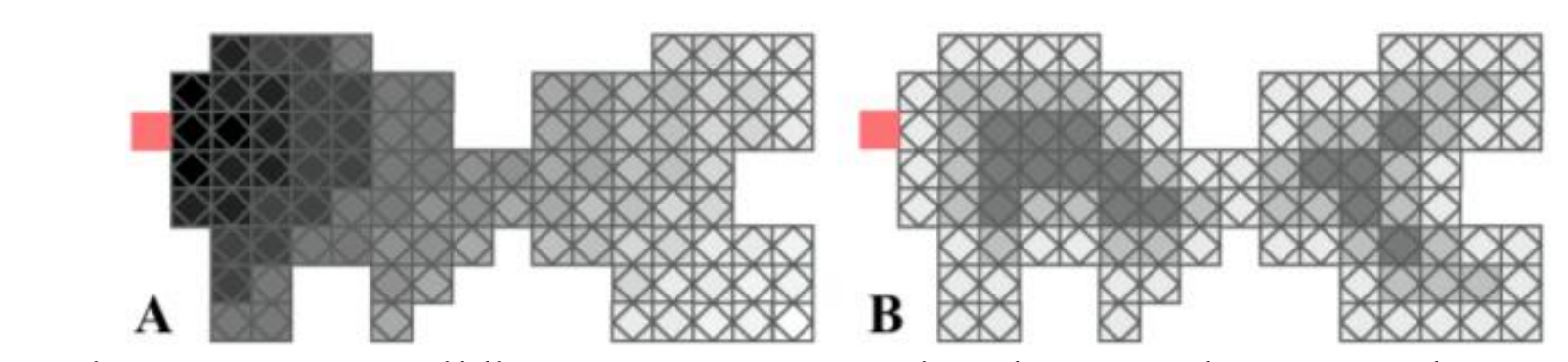
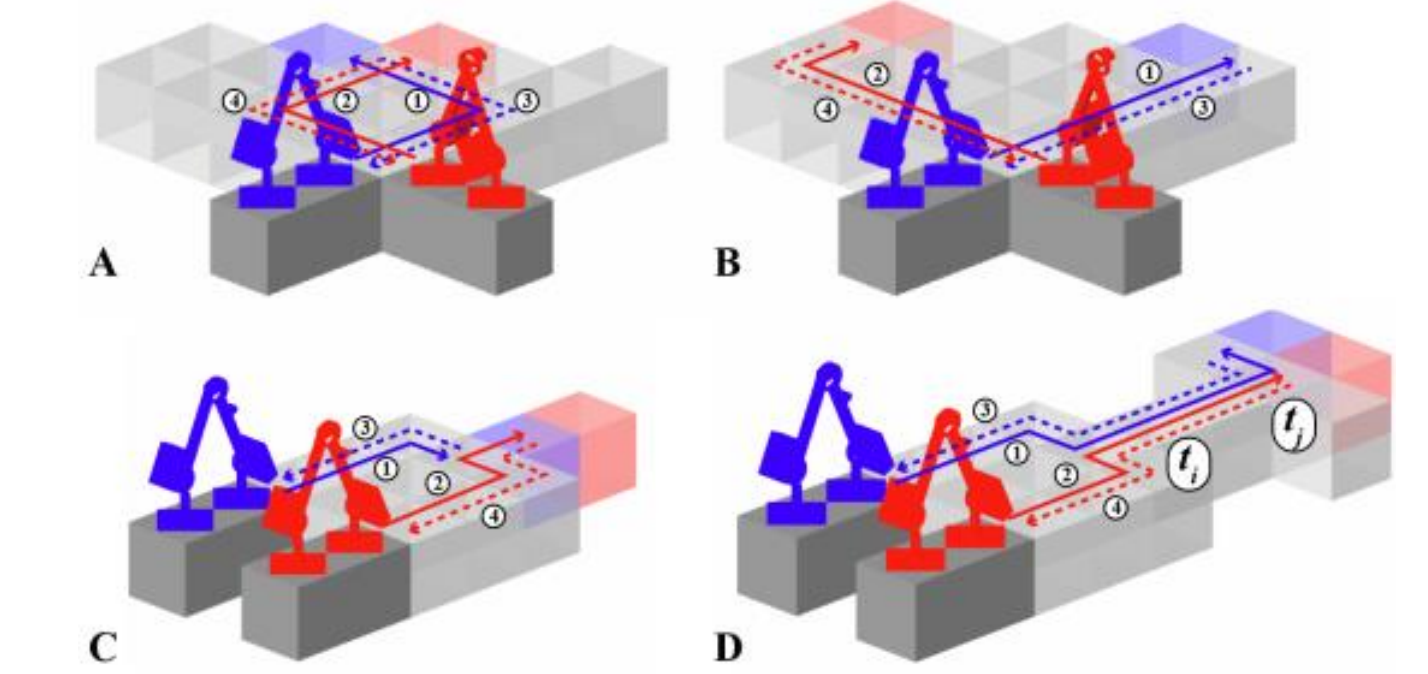
- An example for a multi-agent centralized robot construction system is discussed in this paper: “Material-Robot System for Assembly of Discrete Cellular Structures”.
- the distance field of the target shape to be built is used to get the construction sequence for the building blocks. The centralized systems creates a spatio-temporal map to assign tasks to different robots.
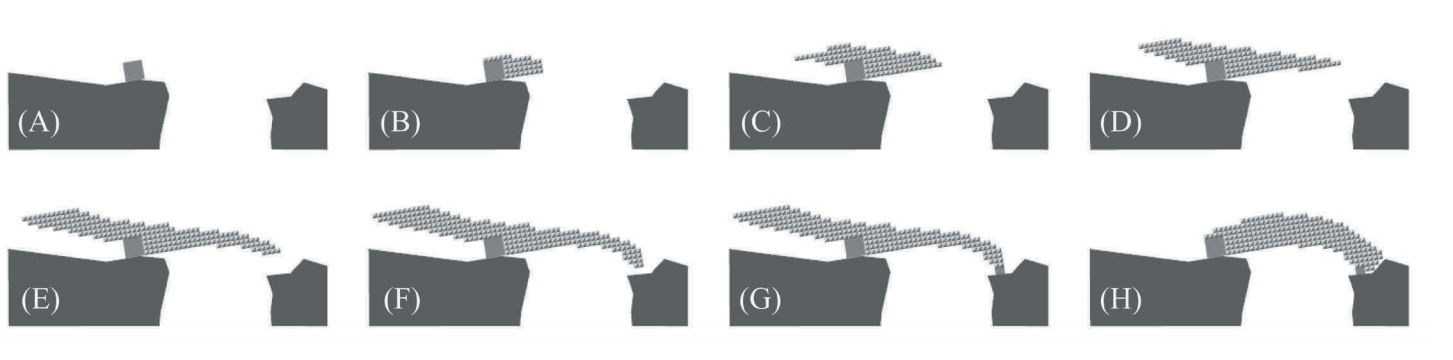
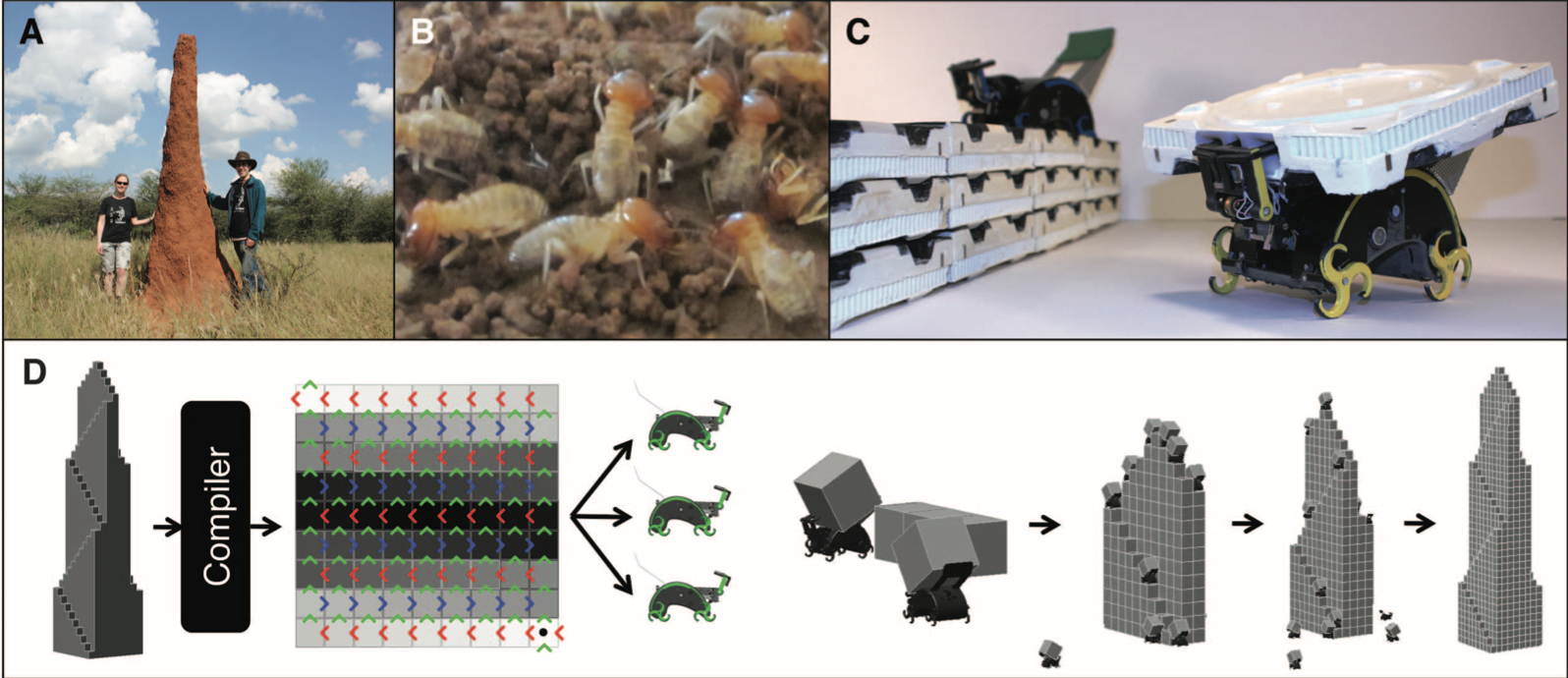
- An example for a distributed multiagent construction system is “Termes”. In the paper “Designing Collective Behavior in a Termite-Inspired Robot Construction Team”. Inspired by termites and how they use stigmergy and local cues to build large structures, the agents use a height map of the desired target structure to create a set path (that all the robots follow) with local rules on when to build/deposit material.
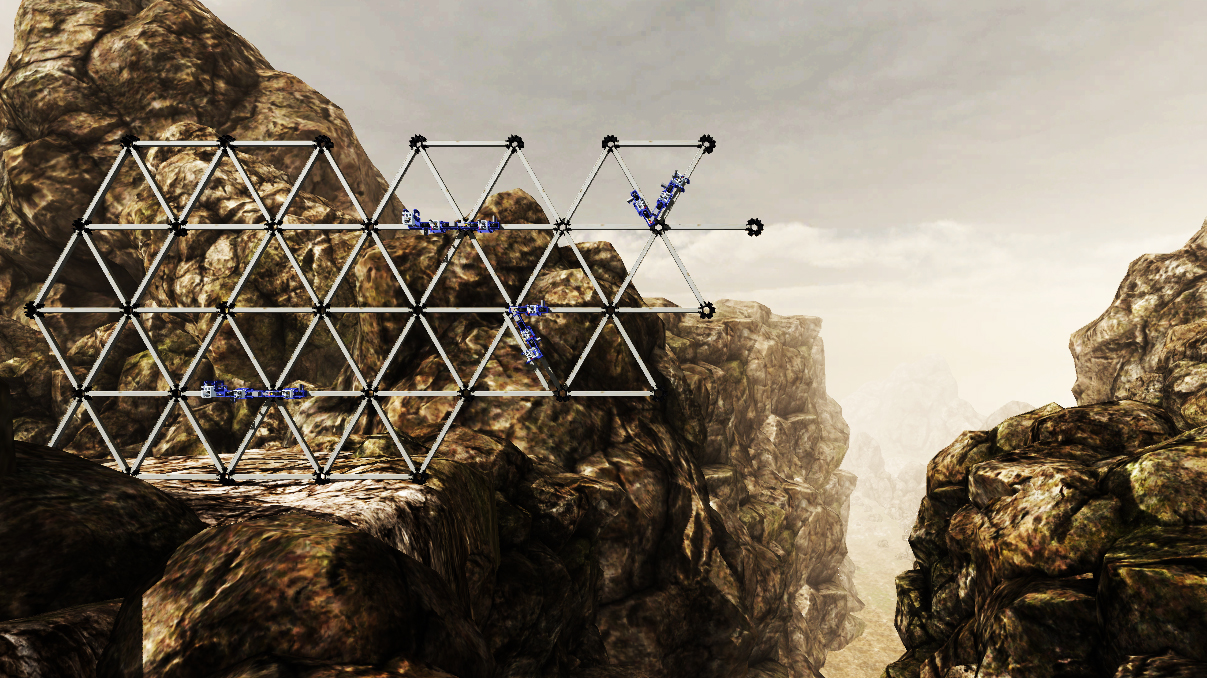
- Moreover, force aware distributed robotic construction was explored in detail in Nathan Melenbrink paper: “Local force cues for strength and stability in a distributed robotic construction system”