Week 08 :: Input Devices
How can we gather information about gestures?
1. Measure Something
In my original sketch for the final project, I thought it might be useful to incorporate biometric feedback into the design of a haptic glove.
Niklas Hagemann had two suggestions for how I might do this: measure a flex sensor, and measure gyroscope readings.
1.1. Measuring input from a flex sensor.
To get the flex sensor working, I simply referred to code and wiring diagram available in the following tutorial.
I wasn't intending to control lights with the flex sensor, but this example makes it extremely intuitive.
Now that I know I can connect a gesture to an output device, I'm wondering if I might be able to set up gesture control to activate motion tracking in my final project.
1.2. BNO08x, 9 Degree-of-Freedom Orientation IMU
Inertial Measurement Unit (IMU) is an electronic device that measures and reports a body's specific force, angular rate, and sometimes orientation.
Reading the documentation, I learned that the ESP-32C3 I intended to use might not be compatible with the accelerometer. Instead, I'll be trying to use XIAO RP2040 to connect to the IMU.
2. Probe an Input Device's analog levels and digital signals
Working with Niklas Hagemann, we attemped to use the oscilloscope to visualize both analog and digital communication.
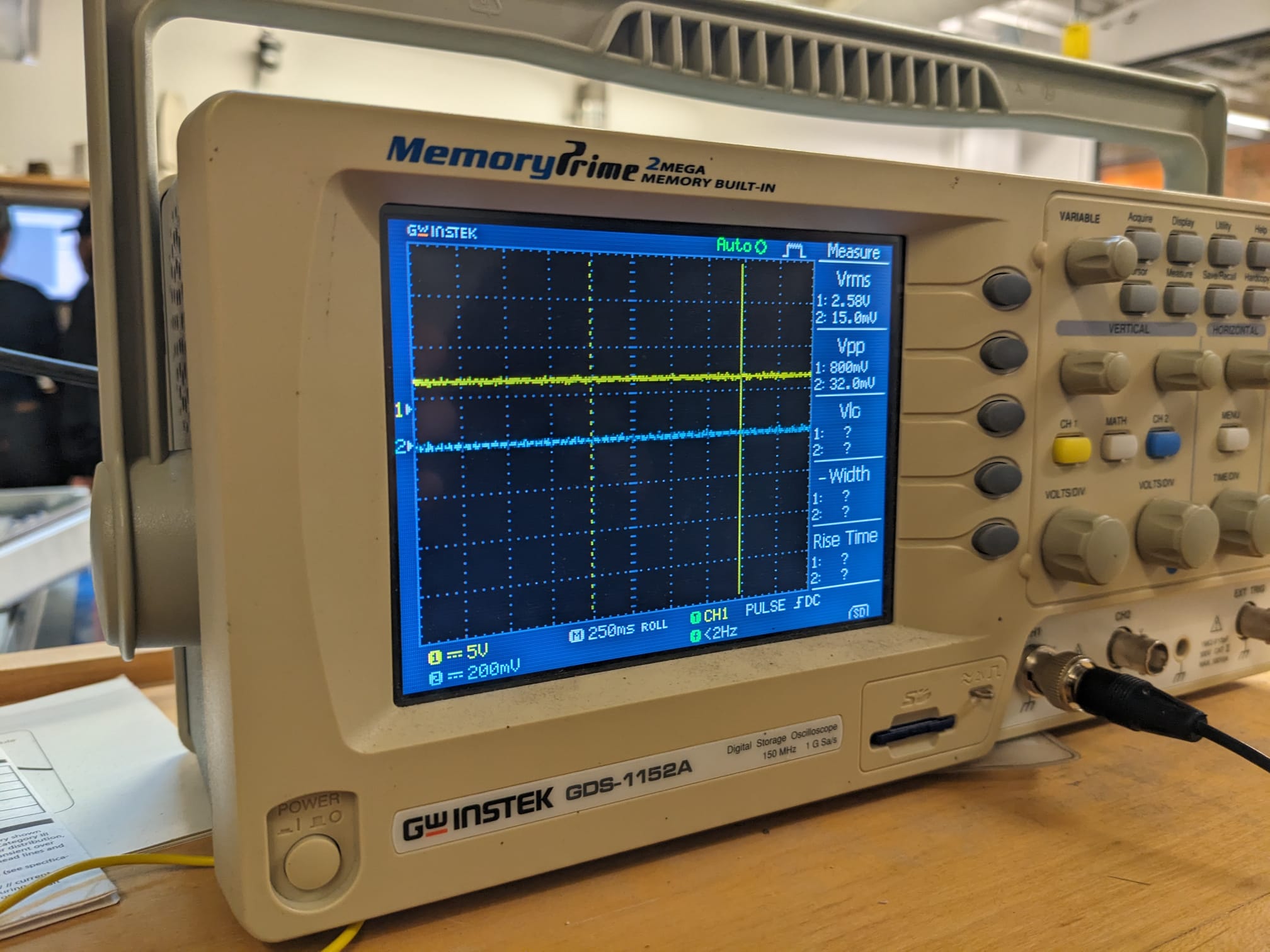 For digital communication, we probed an ESP-32CAM, which uses UART, universal asynchronous receiver / transmtter. Measuring the UOT pin from the oscilloscope, we see a constant signal.
For digital communication, we probed an ESP-32CAM, which uses UART, universal asynchronous receiver / transmtter. Measuring the UOT pin from the oscilloscope, we see a constant signal.
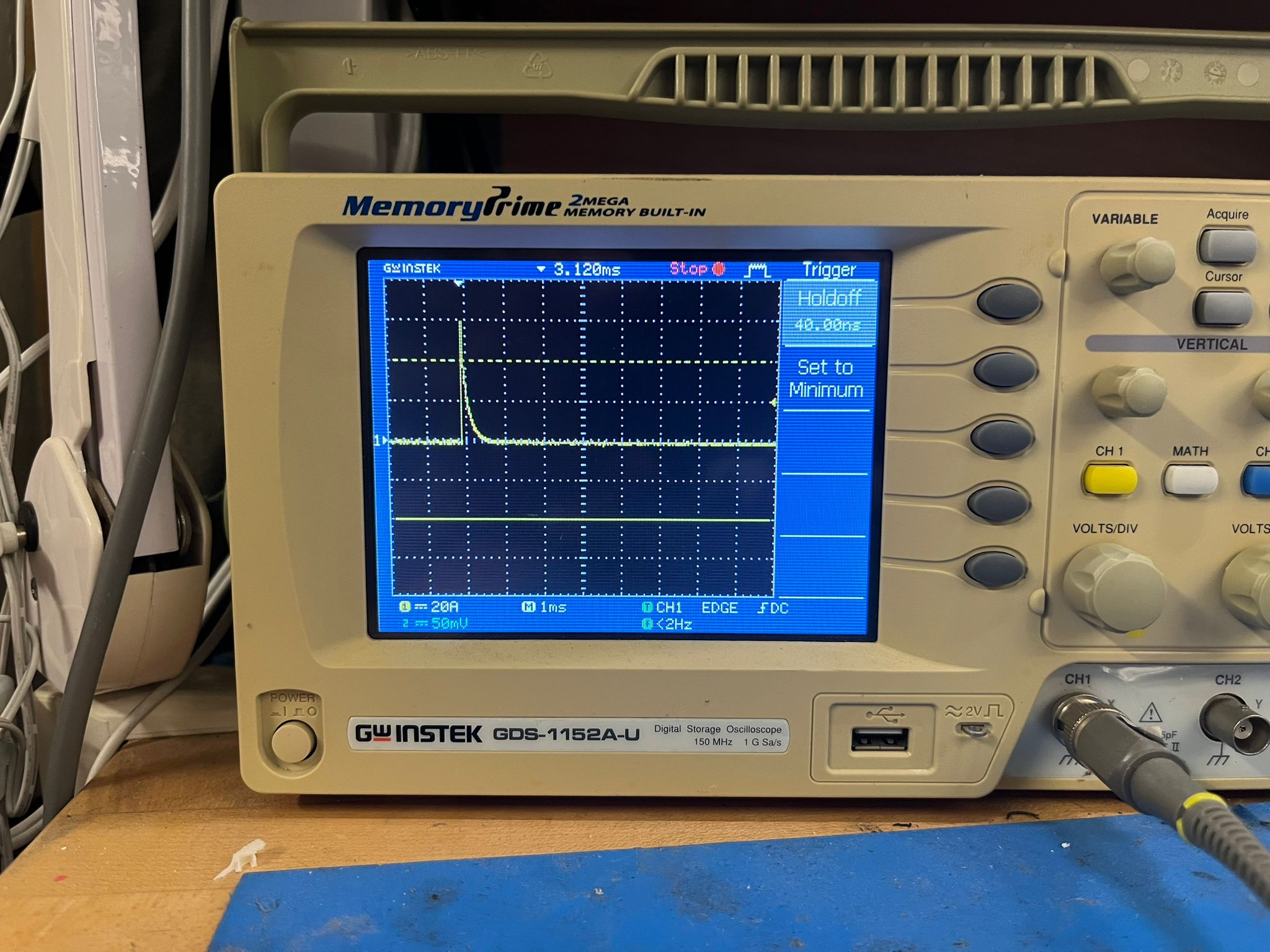 For analog communication, we measured the signal from a capacitive sensor.
For analog communication, we measured the signal from a capacitive sensor.