This week started off with big ambitions. The vision was a fabric (for clothing or soft robot skins) that could sense, record, and replay touch through light. I was very interested in capacitive sensing because it would afford the ability to sense close proximity as well, and because I'd never been able to make it work before.
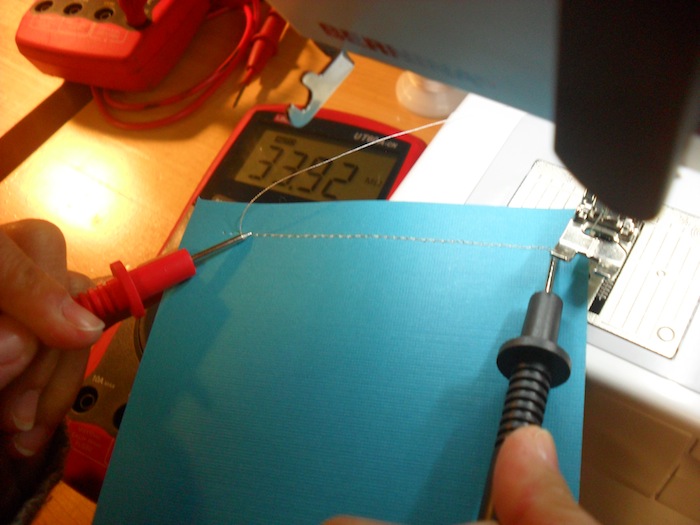
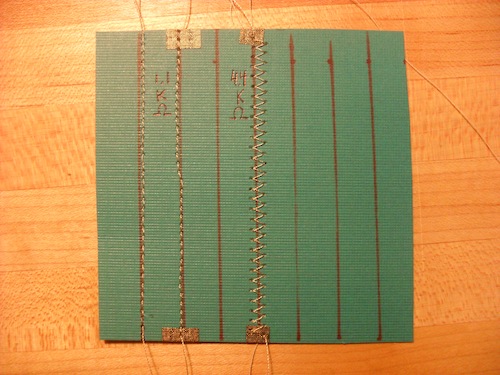
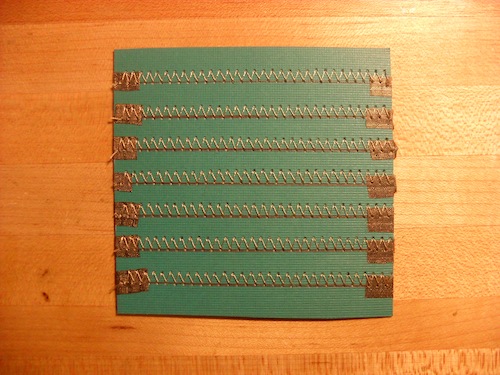
Jie and I were both thinking about paper and textiles so we started the week collaboratively experimenting with resistive paper and thread touch-sensing matrices.
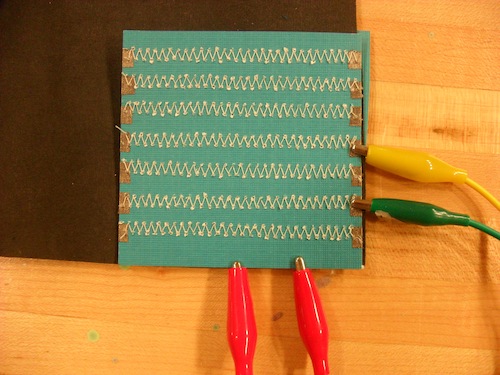

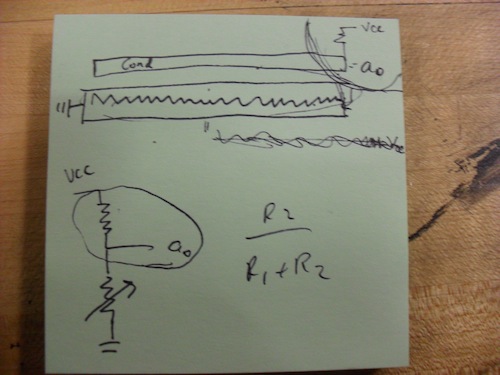
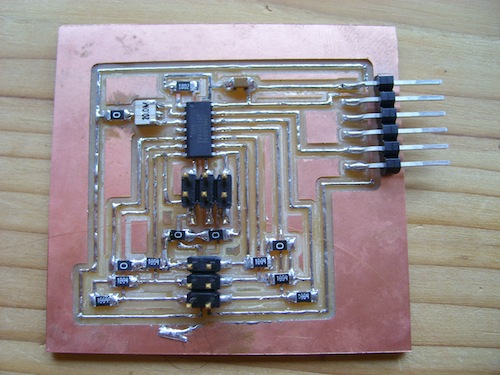
Then I designed, milled, and stuffed a board that would allow 3 row inputs and 3 column inputs using the step-response approach to sense capacitance.
The first prototype: a bracelet that senses and locates touch.


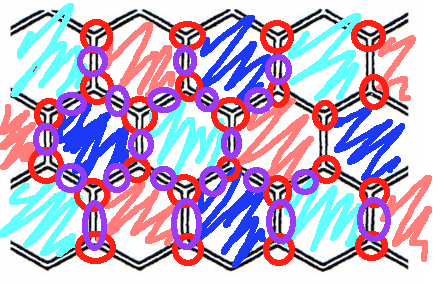
Touch or proximity is detected where rows and columns intersect. There is a certain ambiguity when touching only two; the touch could be anywhere in the 2 by 2 square.
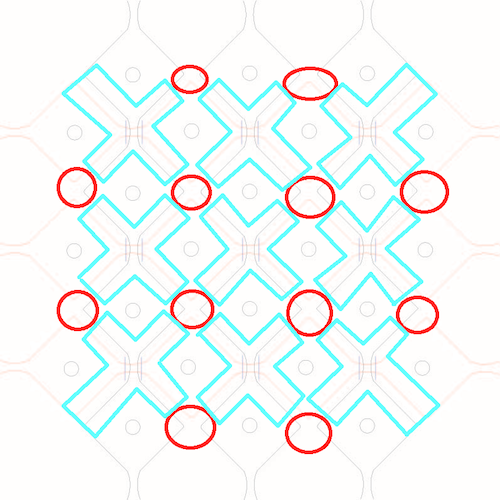
I started thinking about other weave patterns that would reduce this ambiguity in an optimal way (number of pins relative to senseable surface area and resolution).
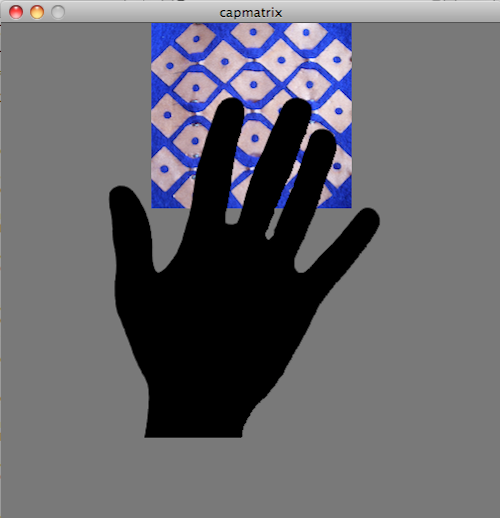
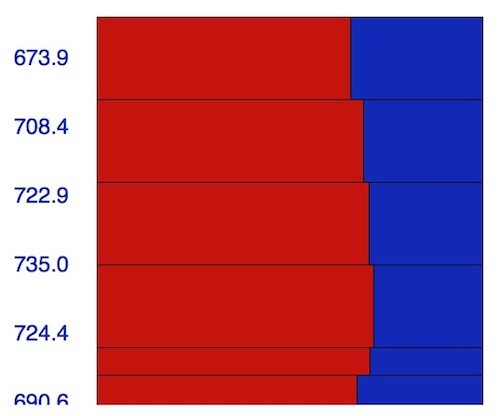
First visualization looks at one pad at a time.
The next one should locate a hand placed on the fabric, still in progress.