
Assignments
Final Project
1) DigitalBot
DigitalBot is concept of completing a tast with number of small robot instead of using a big high performace robot. Each small robot unit will consist of uC, few sensors and indicators. Each robot will act as a node, will be able to communicate with each other and will be able to work together to complete a task.

In this project, I have designed and tested one of such robot which can then easily be mass produced.
Application
It can act as development platform for many robotics projetcs. Some examples are given below -
1) Autonomous Navigating Robot.
2) Enviroment data collector.
Specification
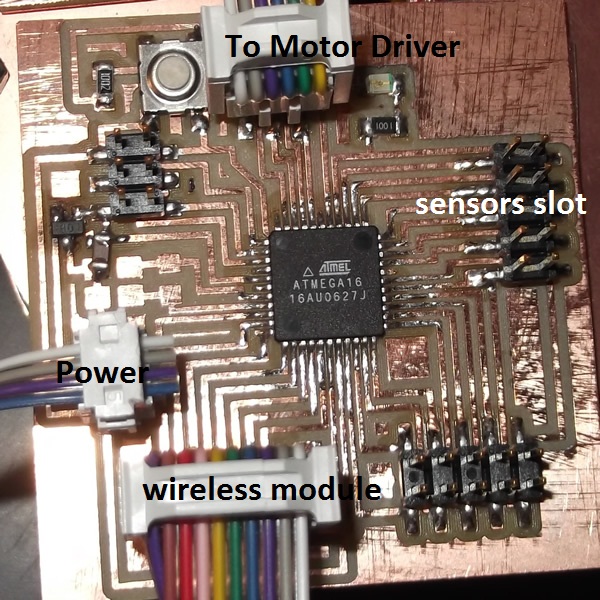
It has an ATMEG16 development board which have slots to attach some sensors, indicators and communication modules. An ATtiny44 based slave board is used to communicate with the master board. The slave board is connected to computer for wireless communication. These slave board can also be used in other simiilar robots so that they can be controlled by the master robot (one with atmega16 board)
Hardware
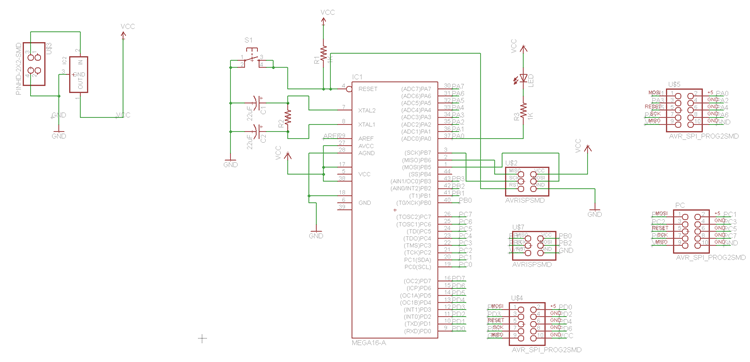
1) Atmega16 Development Board
ATMEGA16 as master uC and ATtiny44 as slave uC.
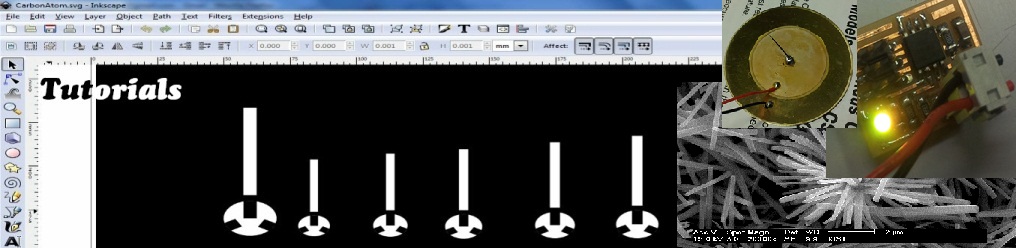
Circuit Diagram
Board layout for milling
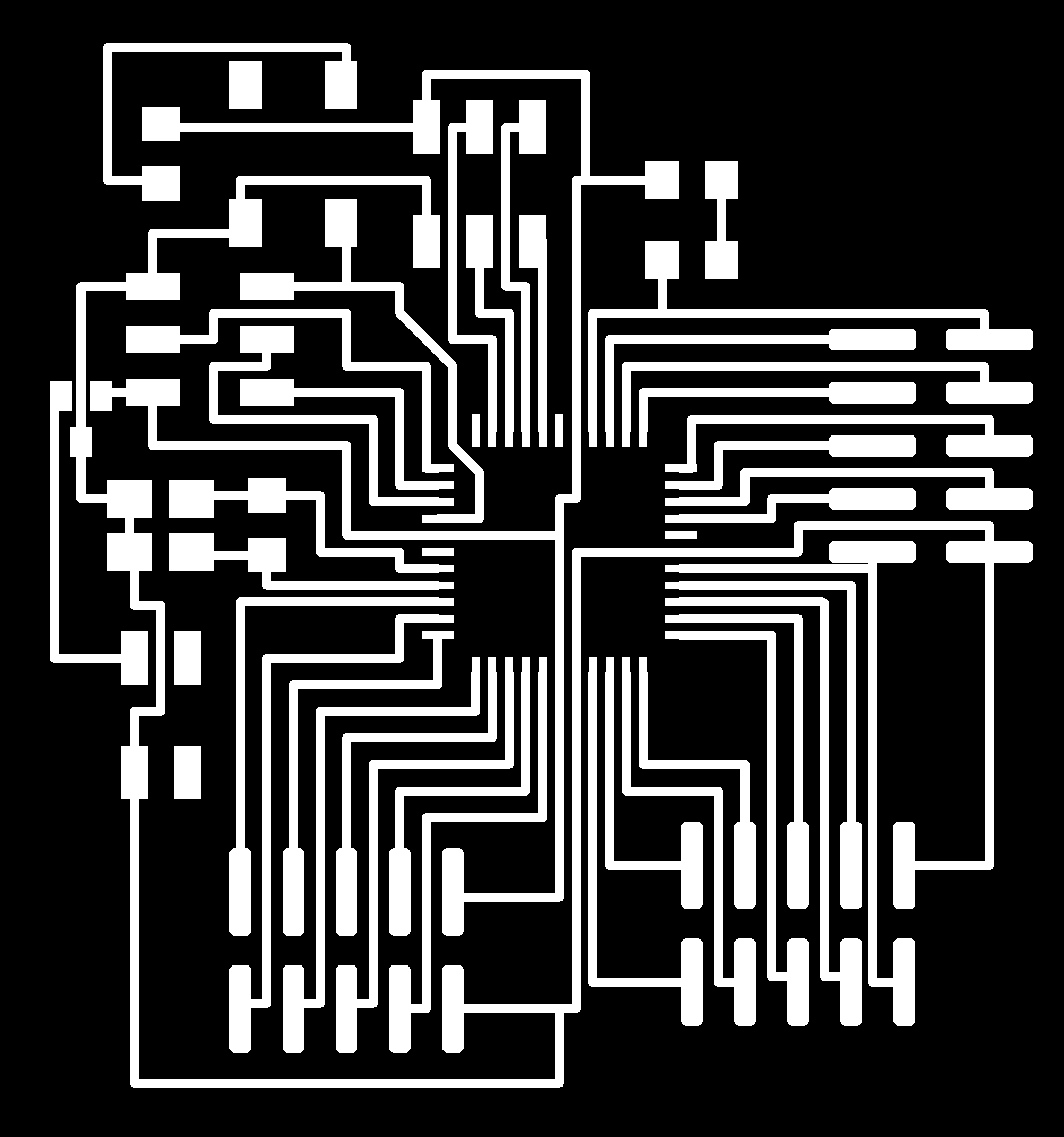{kind=link}
{kind=link}
Example Codes
1) Blink LED (here)
2) USART serial port communication.
- To burn on uC (here)
- Matlab code for PC (here)
3) Motors
You need to first connect the motor driver circuit (explained later) (here)
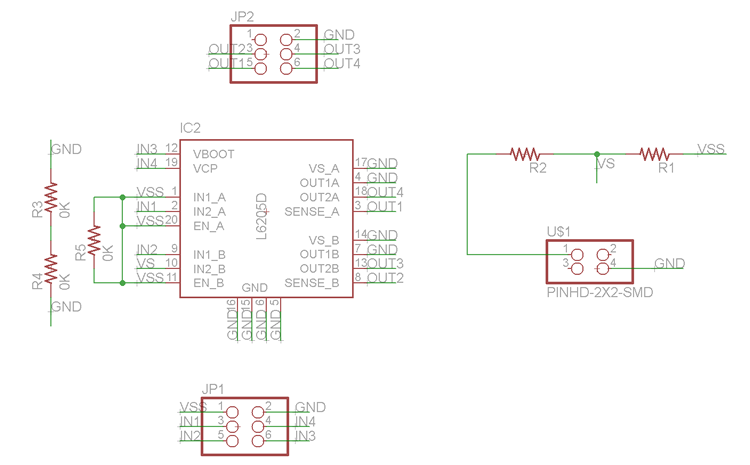
2) Motor Driver Circuit
L293DD motor driver IC is used to drive motor. This driver circuit can be used to -
a) Drive unipolar stepper motor
b) Drive two DC motor (both direction of rotation)
c) Drive four DC motor in only one direction.
The circuit is shown below.
Board layout for milling
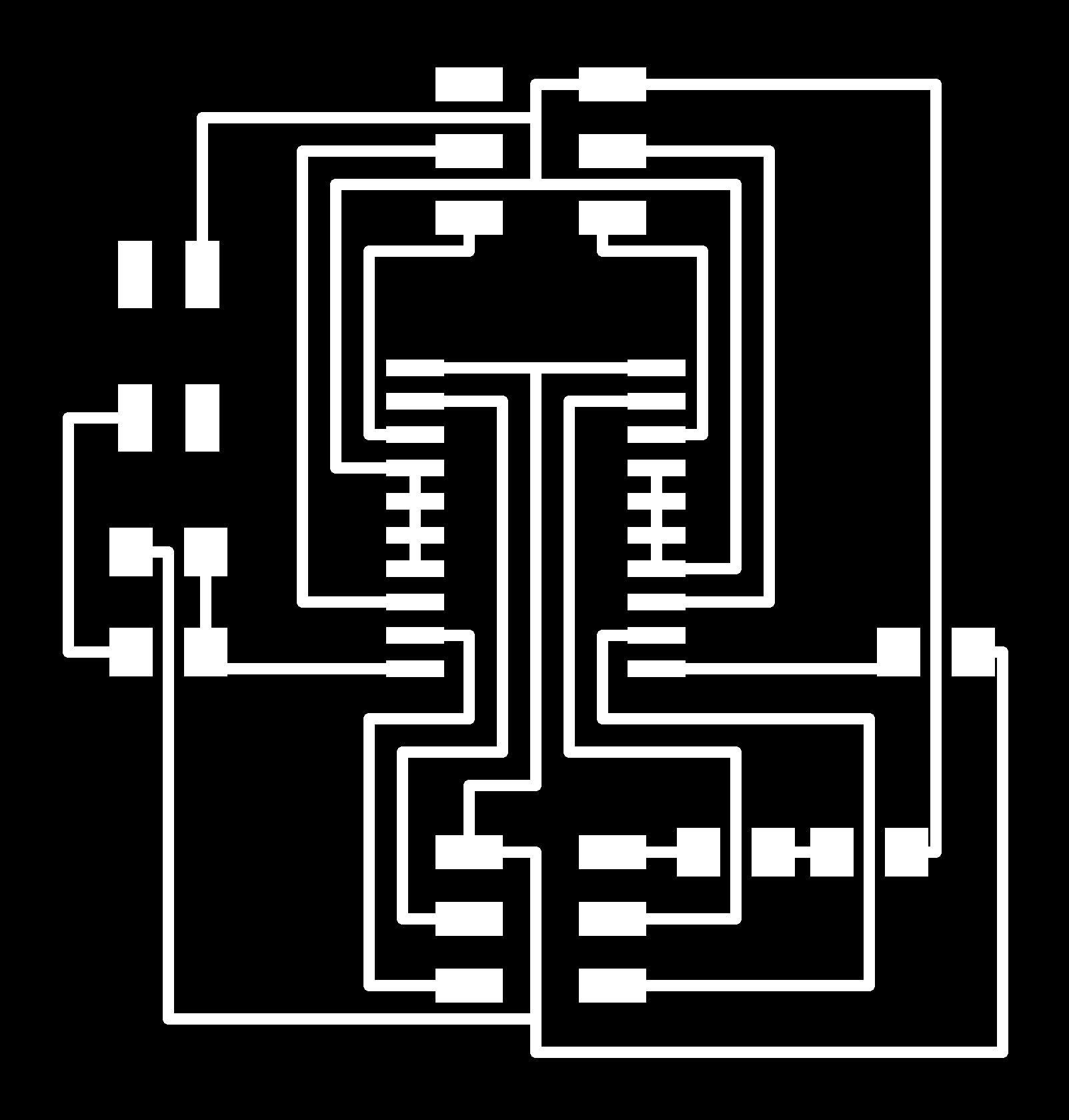{kind=link}
{kind=link}
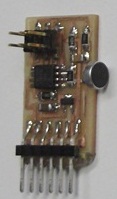
3) Wireless module
A commertially available wireless module is used which runs at 434MHz and used to communicate with the ATtiny44 based slave board which in turn communicate with PC
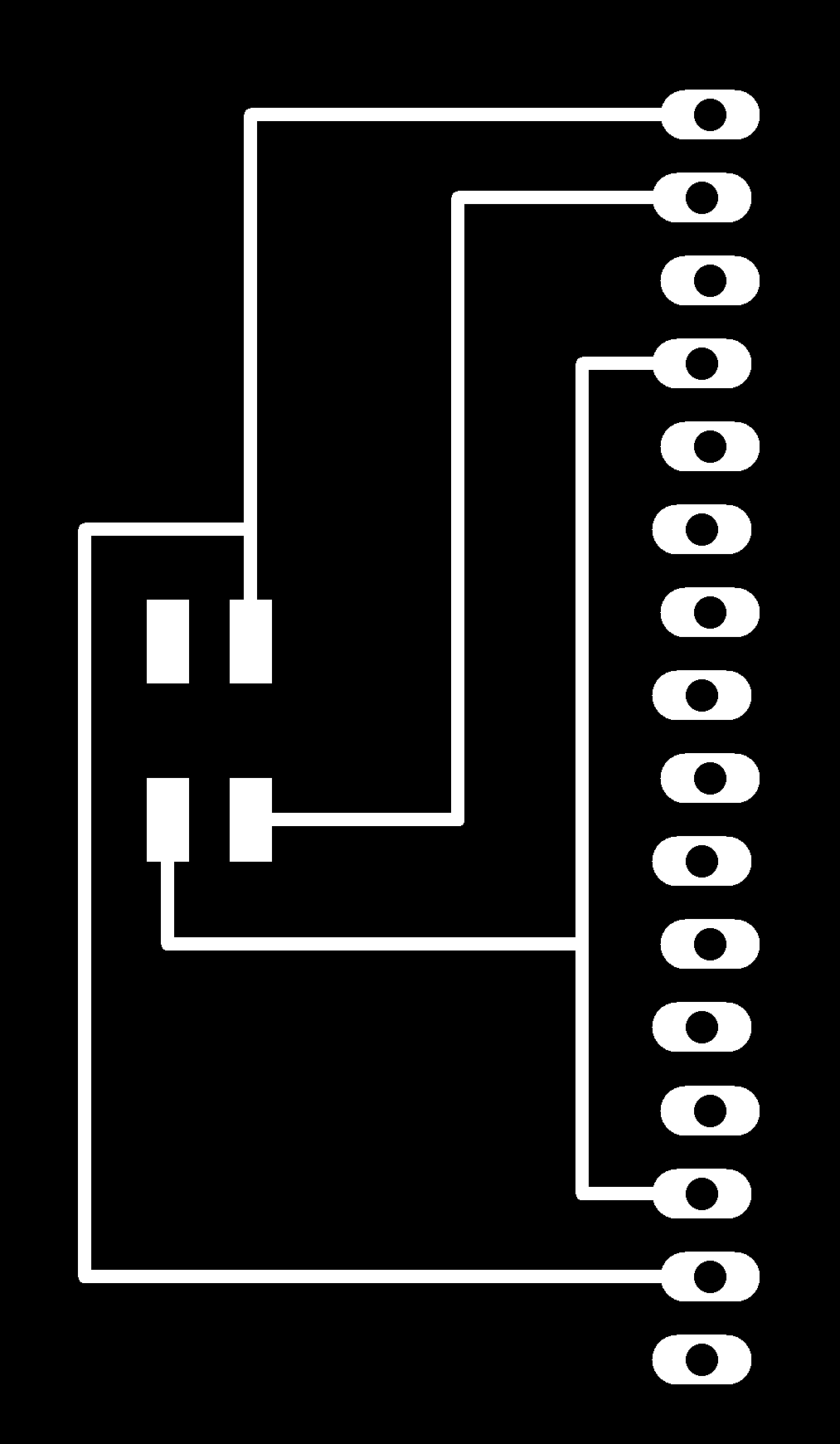
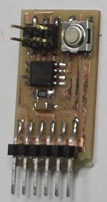
Reciever
Circuit diagram is shown below
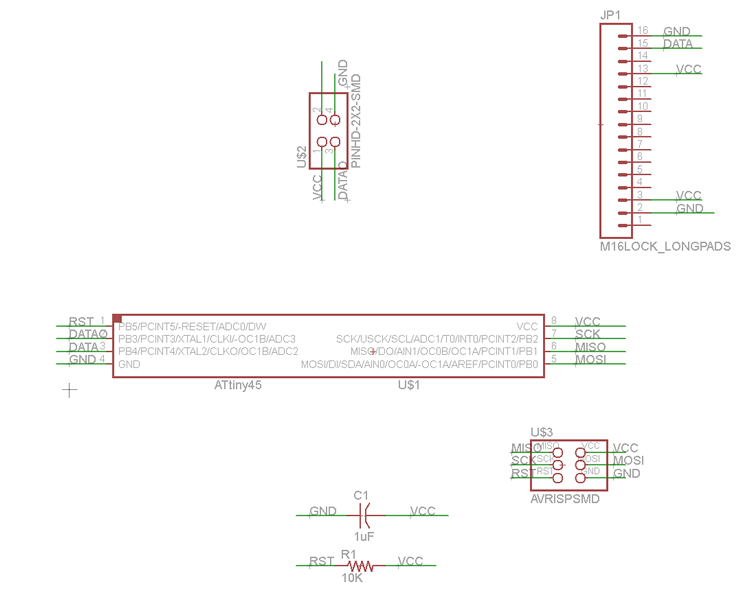
File for milling the board can be found here
{kind=link}
{kind=link}

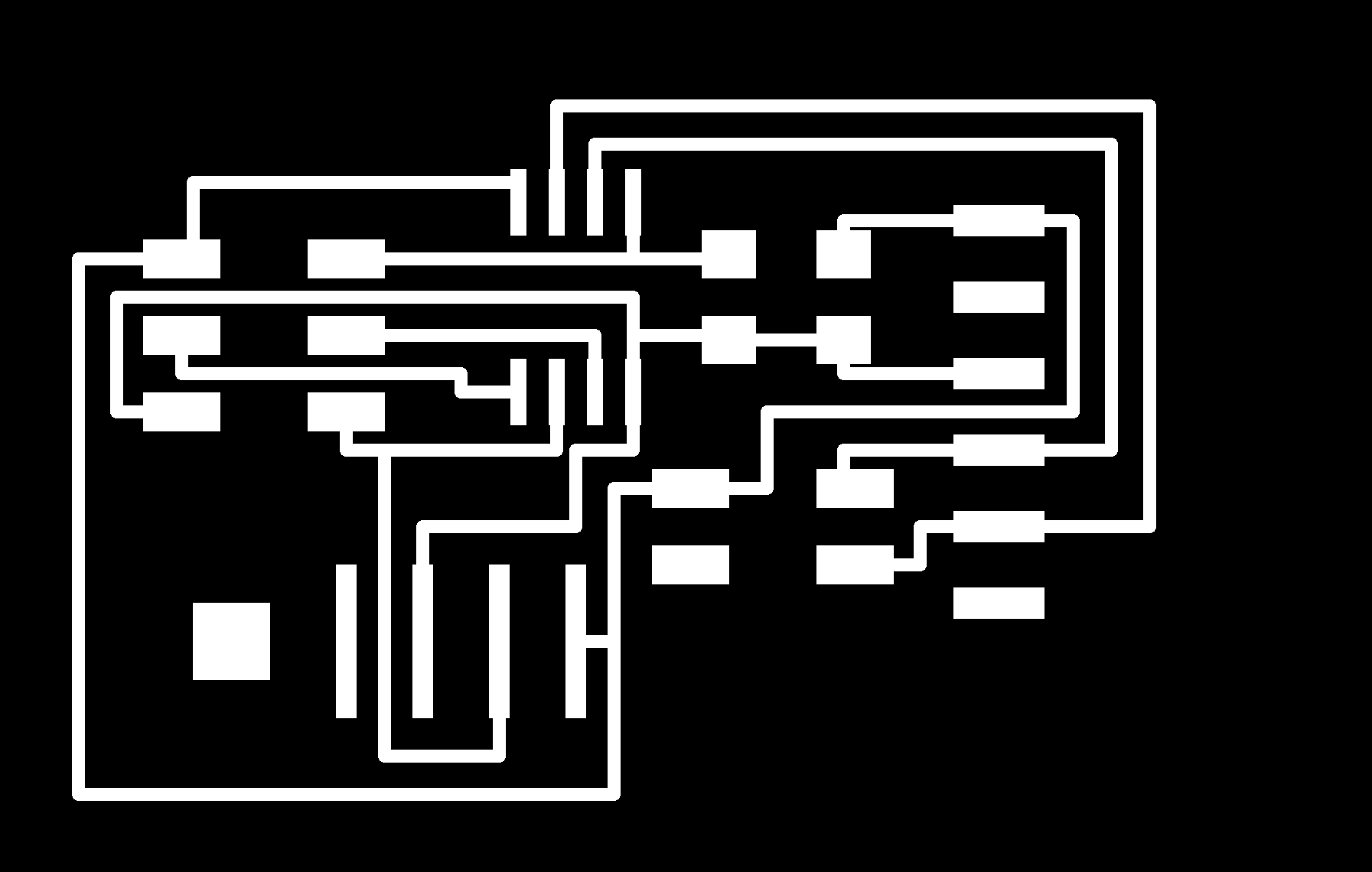
Transmitter
Circuit diagram is shown below
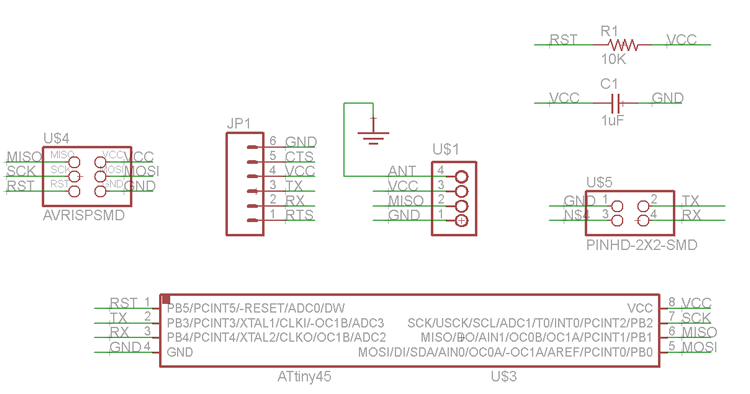
File for milling the board can be found here
{kind=link}
{kind=link}
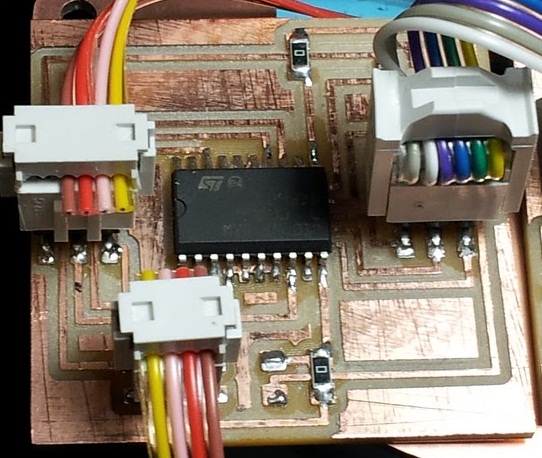
Board is shown below
![]()
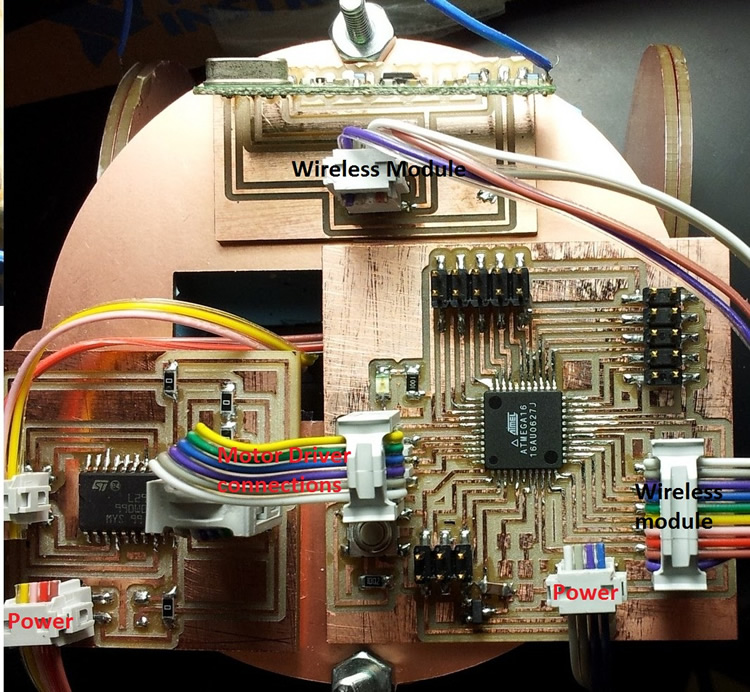
Conneting the parts together
Figure below shows how to connect individual boards
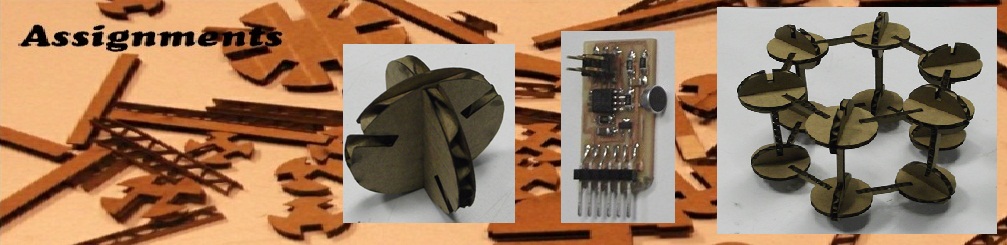
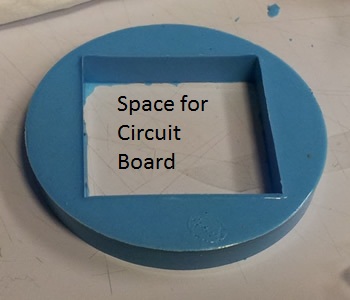
Robot Body
Casting was used for physical structure of the robot so that they can be mass produced. The base structure is casted using oomoo which accomodate two motors and 9V battery. This is sandwiched between two PCB. Initial plan was to embed circuitry in the body of the robot which resulted in using PCB board as some sort of structural material. Design file can be found here

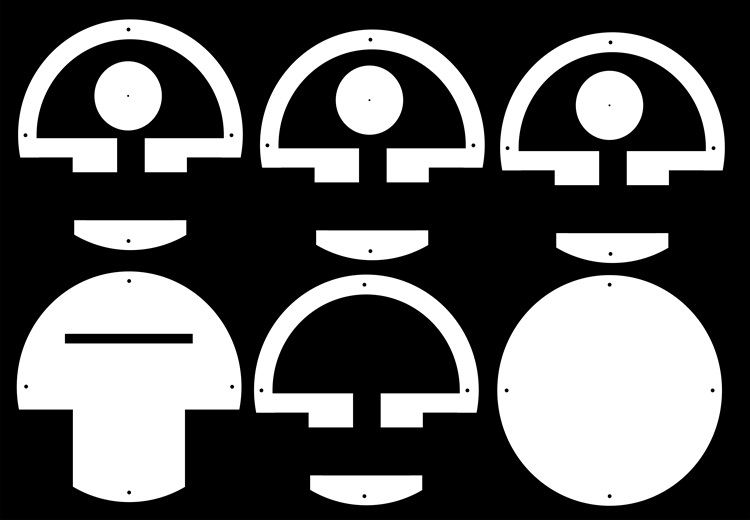
I also decided to use laser cutter, correspoding desig files can be found here
Final Robot
Final robot is shown below.

Video of wireless robot in working
The video below shows the testing of robot while sending the data manually from the transmitter. The transmitter can also be connected to computer and using the matlab code can be controlled from computer.
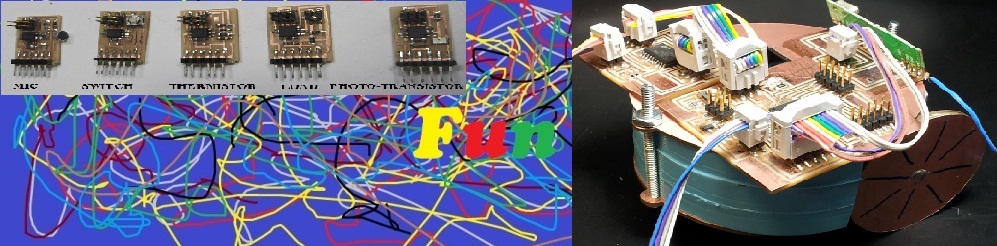
Sensors modules
All Neil's input board are fabricated and the master board is desiged in such a way that all of this boards can be directly attached to the atmega16 master board without any modification.
- Light Intensity Sensor

- Temperure Sensors

- Sound
- Switch
Indicators/ Output devices
All Neil's output board are fabricated and the master board is desiged in such a way that all of this boards can be directly attached to the atmega16 master board without any modification.
- 2x16 Characters LED
- Indicator LEDs
- Buzzer/Speaker
Materials and Components
Electronics -
- ATMEGA16
- ATTINY44
- 2 DC Motor
- Stepper Motor driver (L293DD)
- LCD
Material -
- Casting material for robot body
- Plywood.
It was a great experiance of taking this class.
" This is not the end but the new beginning"
For follow up visit www.patilprashant.com