For networking week, I decided to try a very simple task, but use fast components in anticipation of sending high frequency audio signals in my final project. The RF24L01 had the fastest data transfer rate, so I planned to use my fabduino and accelerometer from earlier in the semester and send this signal to a board that could control a motor. I designed this board. 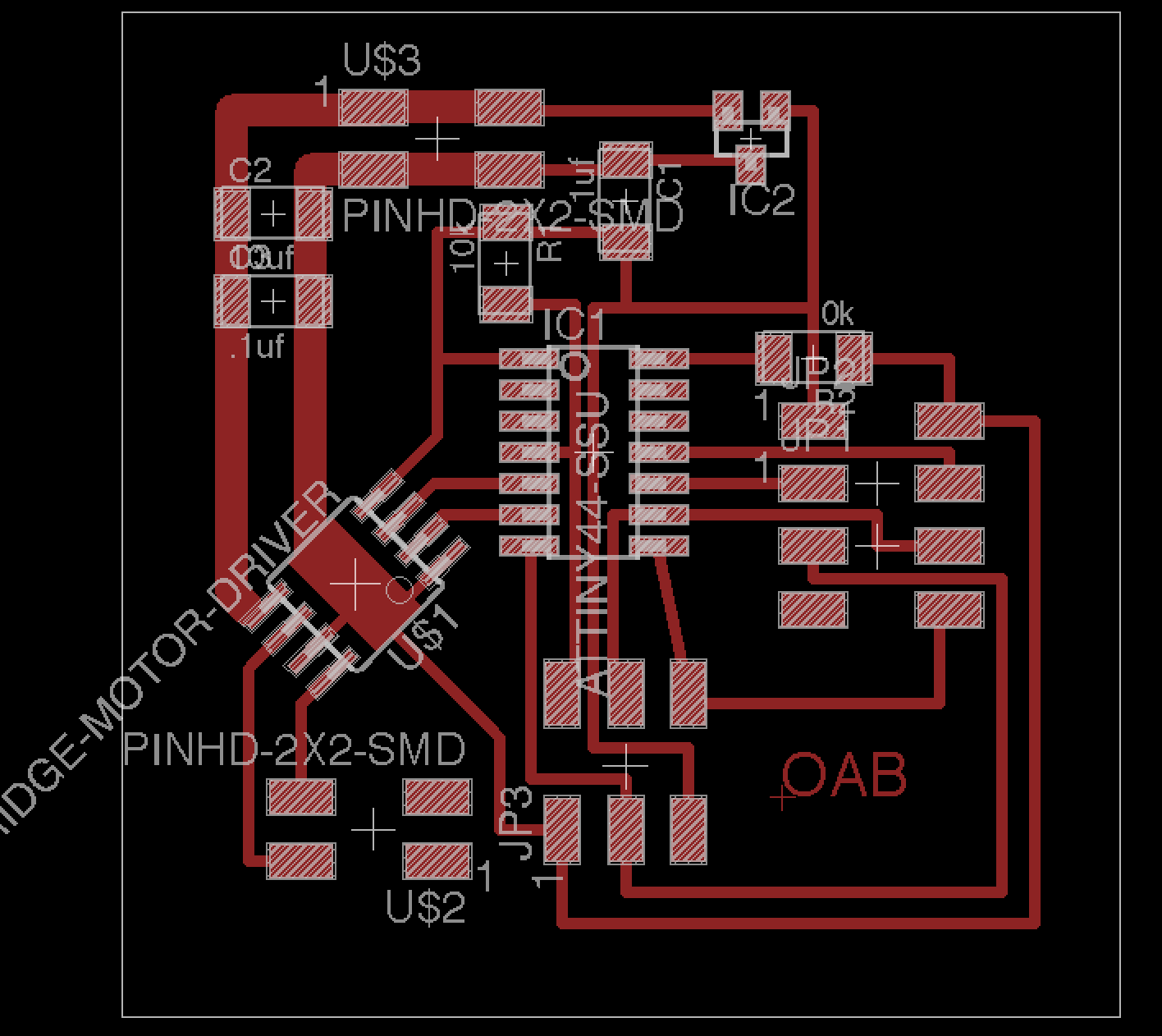
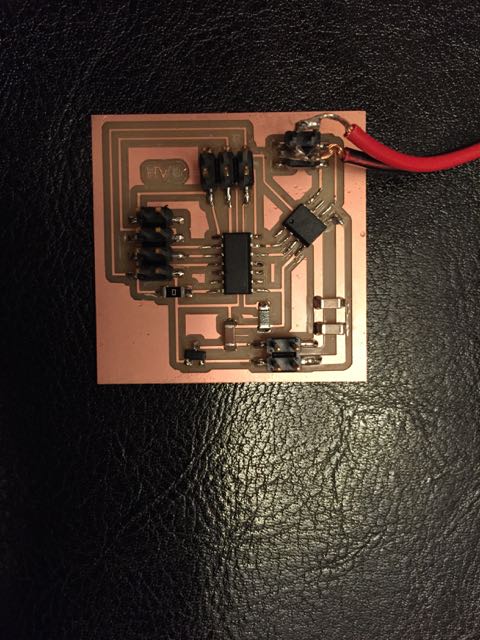
This board has a 2x4 header that directly matches the pins of the RF24. The pins on the RF24 are even nicely labeled on the bottom of the module. This board also has headers for power, motor output, and bootloading. Soldered, the final board looks like this.
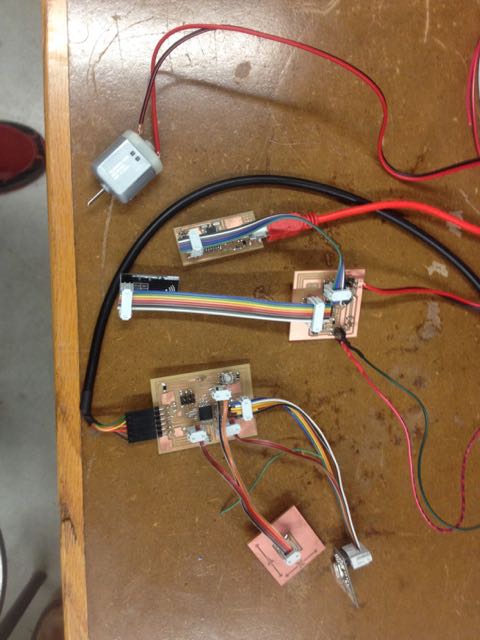
Despite my efforts to keep the board simple and clean, when I hook everything together, it still looks like a mess.
From here, I loaded an arduino bootloader on the new board and attempted to get it to communicat with my Fabduino. my program seemed to work fine on the fabduino, but i could not for the life of me get the ATtiny44 to take the program. It seemed that the SPI commands would not work on the tiny44's Universal Serial Interface. I tried an array of different codes and libraries, with no success. In hindsght, I think the problem may have been not with the SPI/USI issue, but rather with memory. I may have used up all the memory wwith the bootloader and not had enough space for the SPI library. I would like to try running the script again, but first removing the arduino bootloader.