Network and Communications
design, build, and connect wired or wireless node(s) with network or bus addresses
Ble Communication
To be mentioned, the ble-based communication is already be done in Week7-Embedded Computing. In Week9-Input Devices, to make sure the robustness of the data transformation, I used serial port to record data. And this ble-communication version is based on the serial port transformation version. Because the Week7 website page focus more on the system demonstration, I would like to demonstrate the whole code for ble communication and data receiving in this week's websit. In summary, the homework for Week7, 9 and 11 used the same hardware which demonstrated in Week7-Embedded Computing, but focus on different contents.
Wireless Sensors and Signal Transformation
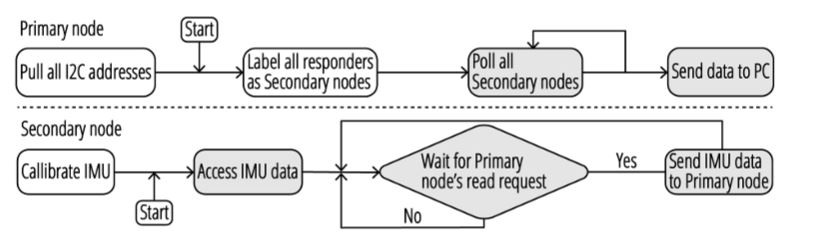
Three IMU sensors are connected together with a controller (Arduino Nano 33 BLE). The controller is responsible for gathering data and transmitting data to a computer via Bluetooth Low Energy (BLE) channel. All data will be sent to a paired computer (laptop), which is responsible for data processing and the presentation of the recognition result. We also enabled smartphones with BLE functionality to control an LED on the primary node to identify each device. A median average filtering algorithm on software was adopted to avoid sensor signal jittering introduced by signal crosstalk, which is common in excessively small PCBs. All IMUs were connected via I2C communication.
import asyncio
import math
import numpy as np
from datetime import datetime
from typing import Callable, Any
# from aioconsole import ainput
from bleak import BleakClient, discover
connection_flag = False
selected_device = []
node = 128 # max length
filterLength = 4
# save the temporary data
qw = np.zeros((node, filterLength))
qx = np.zeros((node, filterLength))
qy = np.zeros((node, filterLength))
qz = np.zeros((node, filterLength))
# save the filtered data
filter_qw = np.zeros(node)
filter_qx = np.zeros(node)
filter_qy = np.zeros(node)
filter_qz = np.zeros(node)
i = 0
threshold = 0.4
error_num = np.zeros((node, 4))
filter_flag = True
def filter(quaternions):
global i
sumqw, sumqx, sumqy, sumqz = [], [], [], []
for num, w, x, y, z in quaternions:
num = int(num)
if i < filterLength:
qw[num][i], qx[num][i], qy[num][i], qz[num][i] = w, x, y, z
else:
# remove the abnormal value
if w > 1.1 or w < -1.1: # made by noise
w = qw[num][filterLength-1]
elif math.fabs(w - qw[num][filterLength-1]) > threshold and error_num[num][0] <= 4: # made by noise or fast moving
w = qw[num][filterLength-1]
error_num[num][0] += 1 # detect error made by fast moving
else:
error_num[num][0] = 0
if x > 1.1 or x < -1.1:
x = qx[num][filterLength-1]
elif math.fabs(x - qx[num][filterLength-1]) > threshold and error_num[num][1] <= 4:
x = qx[num][filterLength-1]
error_num[num][1] += 1
else:
error_num[num][1] = 0
if y > 1.1 or y < -1.1:
y = qy[num][filterLength-1]
elif math.fabs(y - qy[num][filterLength-1]) > threshold and error_num[num][2] <= 4:
y = qy[num][filterLength-1]
error_num[num][2] += 1
else:
error_num[num][2] = 0
if z > 1.1 or z < -1.1:
z = qz[num][filterLength-1]
elif math.fabs(z - qz[num][filterLength-1]) > threshold and error_num[num][3] <= 4:
z = qz[num][filterLength-1]
error_num[num][3] += 1
else:
error_num[num][3] = 0
# update the buffer array / move left 1 unit
qw[num][:-1], qx[num][:-1], qy[num][:-1], qz[num][:-1] = qw[num][1:], qx[num][1:], qy[num][1:], qz[num][1:]
qw[num][filterLength-1], qx[num][filterLength-1], qy[num][filterLength-1], qz[num][filterLength-1] = w, x, y, z
# get the index of the max/min value in arrays
maxqw, maxqx, maxqy, maxqz = np.argmax(qw[num]), np.argmax(qx[num]), np.argmax(qy[num]), np.argmax(qz[num])
minqw, minqx, minqy, minqz = np.argmin(qw[num]), np.argmin(qx[num]), np.argmin(qy[num]), np.argmin(qz[num])
# sum except the max/min value
for k in range(filterLength):
if k != maxqw or k != minqw:
sumqw.append(qw[num][k])
if k != maxqx or k != minqx:
sumqx.append(qx[num][k])
if k != maxqy or k != minqy:
sumqy.append(qy[num][k])
if k != maxqz or k != minqz:
sumqz.append(qz[num][k])
# mean
w, x, y, z = sum(sumqw)/len(sumqw), sum(sumqx)/len(sumqx), sum(sumqy)/len(sumqy), sum(sumqz)/len(sumqz)
# update the buffer array / remove the max/min value
qw[num][maxqw], qw[num][minqw] = w, w
qx[num][maxqx], qx[num][minqx] = x, x
qy[num][maxqy], qy[num][minqy] = y, y
qz[num][maxqz], qz[num][minqz] = z, z
filter_qw[num], filter_qx[num], filter_qy[num], filter_qz[num] = w, x, y, z
sumqw, sumqx, sumqy, sumqz = [], [], [], []
if i < filterLength:
i += 1
start_time = datetime.now()
end_time = datetime.now()
class DataToFile:
column_names = ["time", "delay", "data_value"]
def __init__(self):
pass
def write_to_txt(self, data_values, addr):
print("---------------------------")
with open('/tmp/sensors-{}.txt'.format(addr), 'a') as f:
f.write(data_values + '\n')
try:
quaternions = data_values.split(';')[:-1]
ts = int(quaternions[0])
quaternions = quaternions[1:]
for i in range(len(quaternions)):
quaternion = quaternions[i].split(' ')
quaternions[i] = quaternion[:5]
print('timestamp: {:+}ms'.format(ts))
quaternions = np.array(quaternions)
quaternions = quaternions.astype(np.float16)
filter(quaternions)
for num, w, x, y, z in quaternions:
num = int(num)
print("{} {:+4.2f} {:+4.2f} {:+4.2f} {:+4.2f}".format(num, filter_qw[num], filter_qx[num], filter_qy[num], filter_qz[num]))
with open("/tmp/sensor-{}-{}.txt".format(num, addr), 'w') as f:
f.write("{:+4.2f} {:+4.2f} {:+4.2f} {:+4.2f}".format(filter_qw[num], filter_qx[num], filter_qy[num], filter_qz[num]))
except Exception as e:
print(e)
return
class Connection:
client: BleakClient = None
def __init__(
self,
loop: asyncio.AbstractEventLoop,
read_characteristic: str,
write_characteristic: str,
data_dump_handler: Callable[[str, Any], None],
data_dump_size: int = 10,
):
self.loop = loop
self.read_characteristic = read_characteristic
self.write_characteristic = write_characteristic
self.data_dump_handler = data_dump_handler
self.last_packet_time = datetime.now()
self.dump_size = data_dump_size
self.connected = False
self.connected_device = None
self.rx_data = ''
self.rx_timestamps = []
self.rx_delays = []
async def cleanup(self):
if self.client:
await self.client.stop_notify(read_characteristic)
await self.client.disconnect()
async def manager(self):
print("Starting connection manager.")
while True:
if self.client:
await self.connect()
else:
await self.select_device()
await asyncio.sleep(5.0)
async def connect(self):
if self.connected:
return
try:
print('try connecting')
await self.client.connect()
self.connected = await self.client.is_connected()
if self.connected:
print(F"Connected to {self.connected_device.name}")
await self.client.start_notify(self.read_characteristic, self.notification_handler,)
while True:
if not self.connected:
break
await asyncio.sleep(1.0)
else:
print(f"Failed to connect to {self.connected_device.name}")
except Exception as e:
print(e)
async def select_device(self):
print("Bluetooh LE hardware warming up...")
await asyncio.sleep(2.0) # Wait for BLE to initialize.
devices = await discover()
print("Please select device: ")
response = -1
while response == -1:
for i, device in enumerate(devices):
print(f"{i}: {device.name}")
if device.name == 'IMUsMonitor':
response = i
if response == -1:
devices = await discover()
# while True:
print("Select device: ", response)
print(f"Connecting to {devices[response].name}")
self.connected_device = devices[response]
self.client = BleakClient(devices[response].address, loop=self.loop)
def record_time_info(self):
present_time = datetime.now()
self.rx_timestamps.append(present_time)
self.rx_delays.append((present_time - self.last_packet_time).microseconds)
self.last_packet_time = present_time
def clear_lists(self):
self.rx_data = ''
def notification_handler(self, sender: str, data: Any):
try:
self.rx_data = str(data, 'utf-8')
except:
print(data)
return
self.data_dump_handler(self.rx_data, sender)
self.clear_lists()
async def main():
while True:
# connection_flag = self.client.is_connected()
# YOUR APP CODE WOULD GO HERE.
# print('nihao')
await asyncio.sleep(1)
#############
# App Main
#############
read_characteristic = "00001143-0000-1000-8000-00805f9b34fb"
write_characteristic = "00001142-0000-1000-8000-00805f9b34fb"
if __name__ == "__main__":
while True:
# Create the event loop.
loop = asyncio.get_event_loop()
data_to_file = DataToFile()
connection = Connection(loop, read_characteristic, write_characteristic, data_to_file.write_to_txt)
try:
asyncio.ensure_future(connection.manager())
loop.run_forever()
except KeyboardInterrupt:
print()
print("User stopped program.")
break
finally:
print("Disconnecting...")
loop.run_until_complete(connection.cleanup())