Brian's HTMAA Diary 2024
Week 12: Interface & Application Programming
For Interface & Application Programming, I used the PCB I made for output weak as input for the interface.
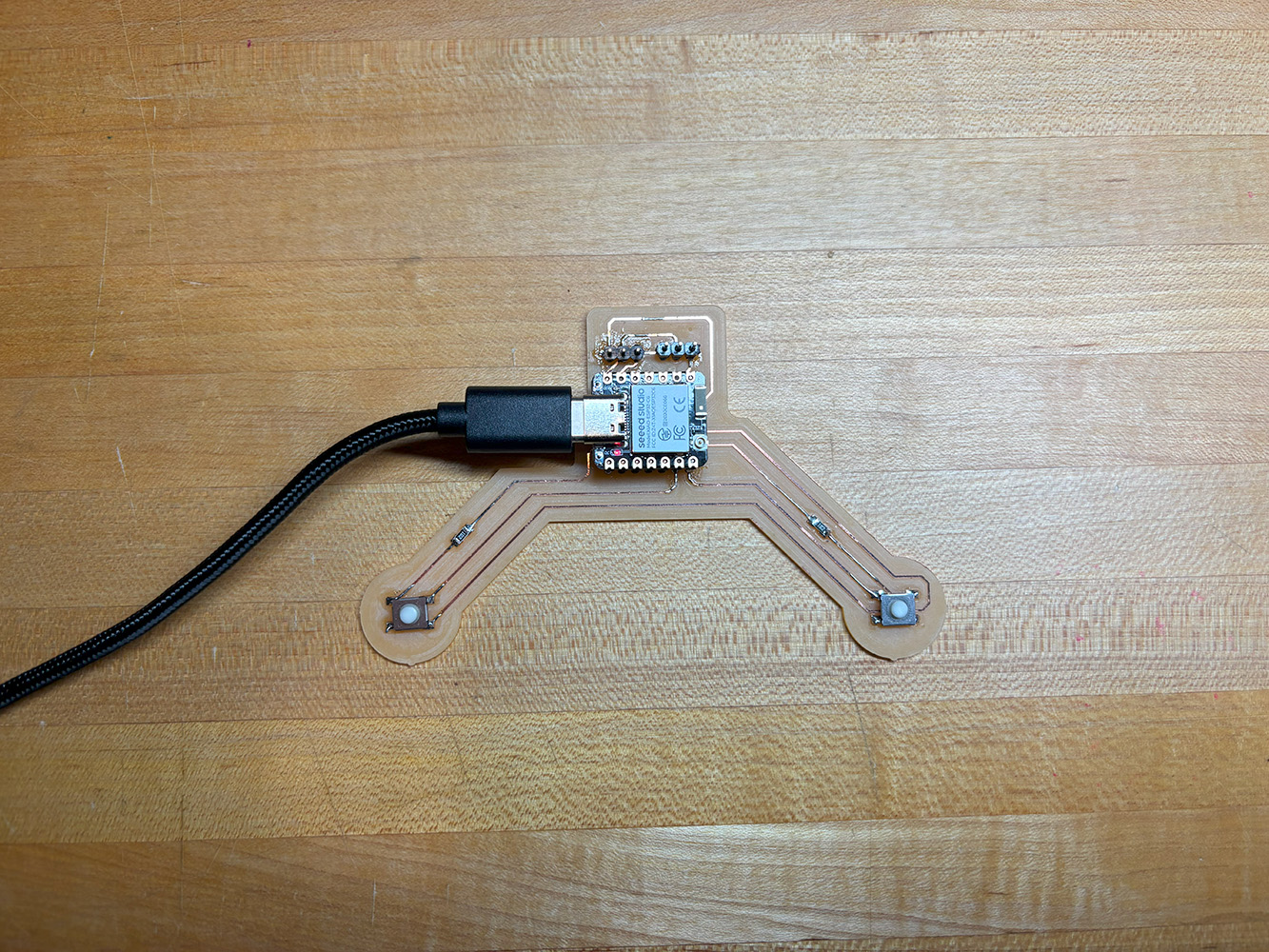
I modified the arduino code so that it just serves as a controller for push buttons whereas previously it controlled servos.
const int PushButton01 = 23;
const int PushButton02 = 16;
void setup() {
Serial.begin(9600);
pinMode(PushButton01, INPUT);
pinMode(PushButton02, INPUT);
}
void loop() {
int buttonState01 = digitalRead(PushButton01);
int buttonState02 = digitalRead(PushButton02);
if ( buttonState01 == HIGH ) {
Serial.println("1");
delay(20);
}
if ( buttonState02 == HIGH ) {
Serial.println("2");
delay(20);
}
}
I first was thinking of making something with p5.js as I had experience with it before, but I decide to try something new and looked into WebGPU.
import serial
import pylinalg as la
import pygfx as gfx
import time
from wgpu.gui.auto import WgpuCanvas
ser = serial.Serial(
port='COM3',
baudrate=9600,
timeout=1,
)
canvas = WgpuCanvas(size=(720, 480), title = "Mobius Strip")
scene = gfx.Scene()
camera = gfx.cameras.PerspectiveCamera(50, 16/9)
camera.local.position = (0, 50, 250)
camera.look_at((0, 0, 0))
obj = gfx.Mesh(
gfx.mobius_strip_geometry(50, 50, 128, stitch=False),
gfx.MeshPhongMaterial(color="#336699"),
)
scene.add(obj)
scene.add(gfx.DirectionalLight())
scene.add(camera.add(gfx.DirectionalLight()))
def rotate():
rot = la.quat_from_euler((0, 0.03, 0))
obj.local.rotation = la.quat_mul(rot, obj.local.rotation)
def controls():
if ser.in_waiting > 0:
data = ser.readline().decode('utf-8').strip()
if data == "1":
obj.world.x -= 2
if data == "2":
obj.world.x += 2
if __name__ == "__main__":
gfx.show(scene,canvas=canvas, after_render=controls, before_render=rotate,camera=camera)