Overview
This week combined mechanical design and machine automation in a group project to create an actuated icosahedron - a twenty-faced polyhedron where each triangular face displays Neil Gershenfeld's face and the entire structure can expand, contract, and rotate. The machine includes mechanisms for actuation, automation features with motor control, functional transformation capabilities, and a user interface through sound. The project demonstrates principles of kinematic design, mechanism integration, and coordinated multi-axis actuation in creating an expressive kinetic sculpture.
Design Concept: The Neil Icosahedron
An icosahedron is a polyhedron with 20 equilateral triangle faces, 30 edges, and 12 vertices - one of the five Platonic solids. Our design takes this elegant geometric form and transforms it into a kinetic sculpture that can breathe, pulsate, and spin. Each of the 20 triangular faces features an image of Neil Gershenfeld, creating a faceted, almost disco-ball-like appearance when assembled. The machine can expand and contract like a living organism while rotating to create dynamic visual effects.
The design incorporates multiple mechanisms: a radial expansion system that allows all faces to move outward and inward simultaneously while maintaining the icosahedral shape, a central rotation drive for spinning the entire structure, and a speaker system for audio playback of Neil's words. This combination of mechanisms creates a machine that's part sculpture, part automaton, expressing both geometric beauty and playful interactivity.
3D Model Visualization
Below is the interactive 3D model of our actuated icosahedron. You can rotate and explore the geometry to see how the faces are arranged and how the mechanism is structured.
The 3D model shows the icosahedral geometry with each triangular face mounted on a radial arm. The central core houses the actuation mechanisms - motors for rotation and linear actuators for expansion/contraction. The faces are connected through a linkage system that maintains geometric constraints while allowing coordinated motion.
Prototyping and Scaling
Initial Proof of Concept

Early stick prototype exploring the expansion mechanism

True-scale prototype validating dimensions and geometry
We began with low-fidelity prototypes using simple materials - sticks, tape, and cardboard. These early models helped us understand the kinematic constraints of the icosahedron and test different expansion mechanisms. The stick prototype demonstrated that a radial push-pull system could work, with each face mounted on an arm that slides along a guide. The true-scale prototype validated our size calculations and revealed clearance issues between adjacent faces during expansion.
Prototyping at multiple scales proved valuable. Small models built quickly let us iterate on mechanism concepts. Full-scale mockups revealed practical issues with weight, balance, and the forces required for actuation. We discovered that the faces needed to be surprisingly light to avoid overloading the motors, and that the expansion range needed limits to prevent geometric binding when faces came too close together.
Fabrication Process
Face Production
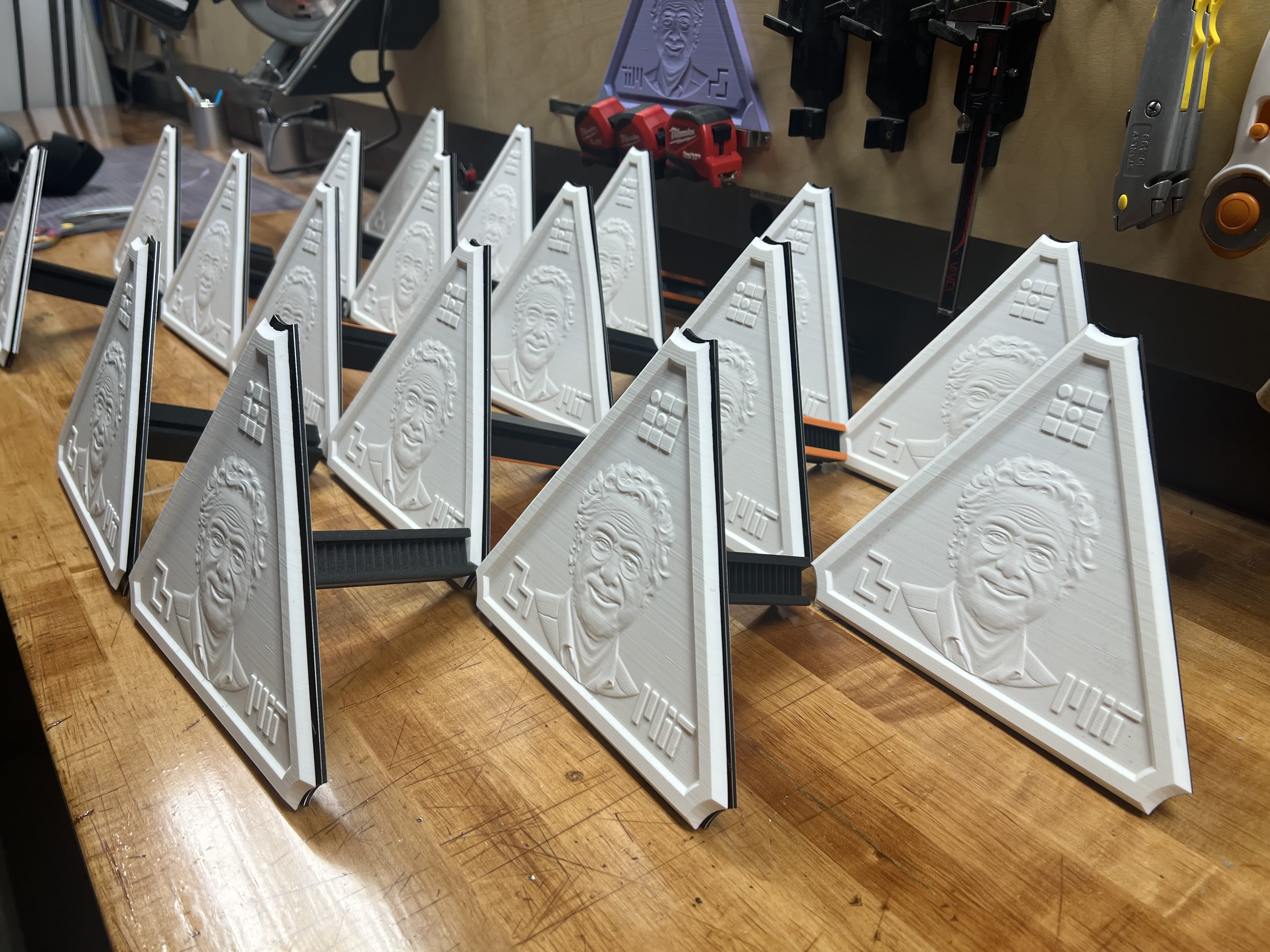
Fabricating the 20 triangular faces with Neil's image
Producing 20 identical triangular faces required efficient manufacturing. We laser-cut the triangles from lightweight material - thin plywood or acrylic provided structural rigidity without excessive mass. Each face received a image of Neil's face using casting. The printing and mounting process needed to be repeatable to ensure all 20 faces matched in appearance.
The faces also required mounting hardware. Each triangle has attachment points at its center for connection to the radial arm mechanism. These mounting points needed careful positioning. We used small brackets or 3D printed clips to secure faces to the mechanism while allowing easy removal for maintenance or replacement.
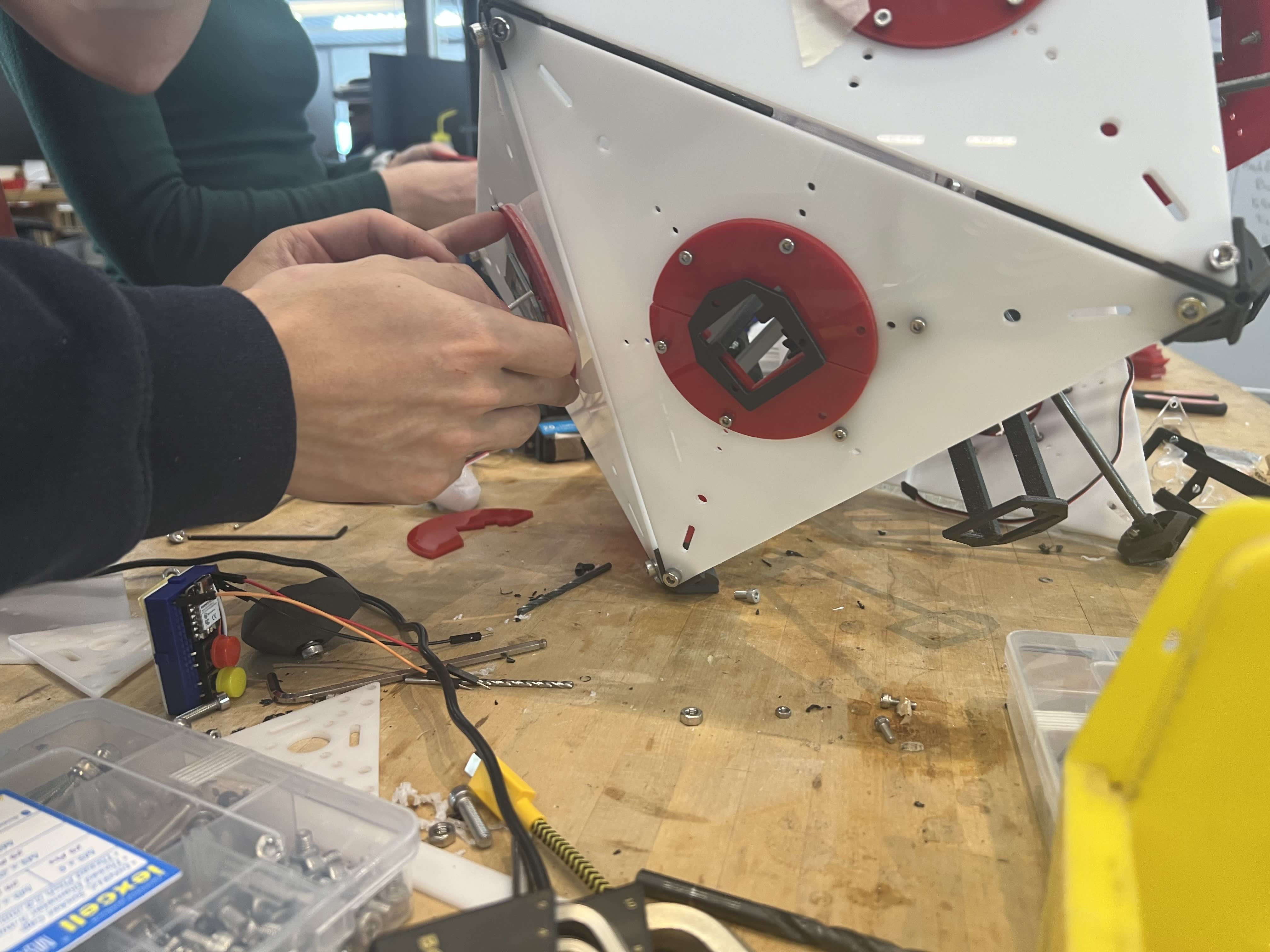
Mechanical Assembly

Assembling the central actuation core

Integrating stepper motors for actuation
The core mechanism presented the most complex assembly challenge. At the center sits a hub containing the rotation motor and the expansion drive system. The rotation uses a servo motor with a large gear that spins. The expansion mechanism employs a linear actuator pushes and pulls a central slider.

Mounting faces to the radial mechanism
Final assembly with structural shell
Attaching the faces to the mechanism required precise alignment. Each face arm extends from the central hub at the correct angle to maintain icosahedral geometry. The structural shell provides stability and houses the electronics while maintaining an aesthetic appearance when the faces are contracted.
Actuation and Automation
Motor Control System
The automation required coordinating multiple motors with precise timing. A XIAO ESP32-C3 sends step pulses to servo motors wirelessly.
Audio Integration
The speaker system adds an auditory dimension to the machine's expression. A small amplified speaker mounts within the central core, protected but positioned where sound can emanate outward through the gaps between faces.
Final Result
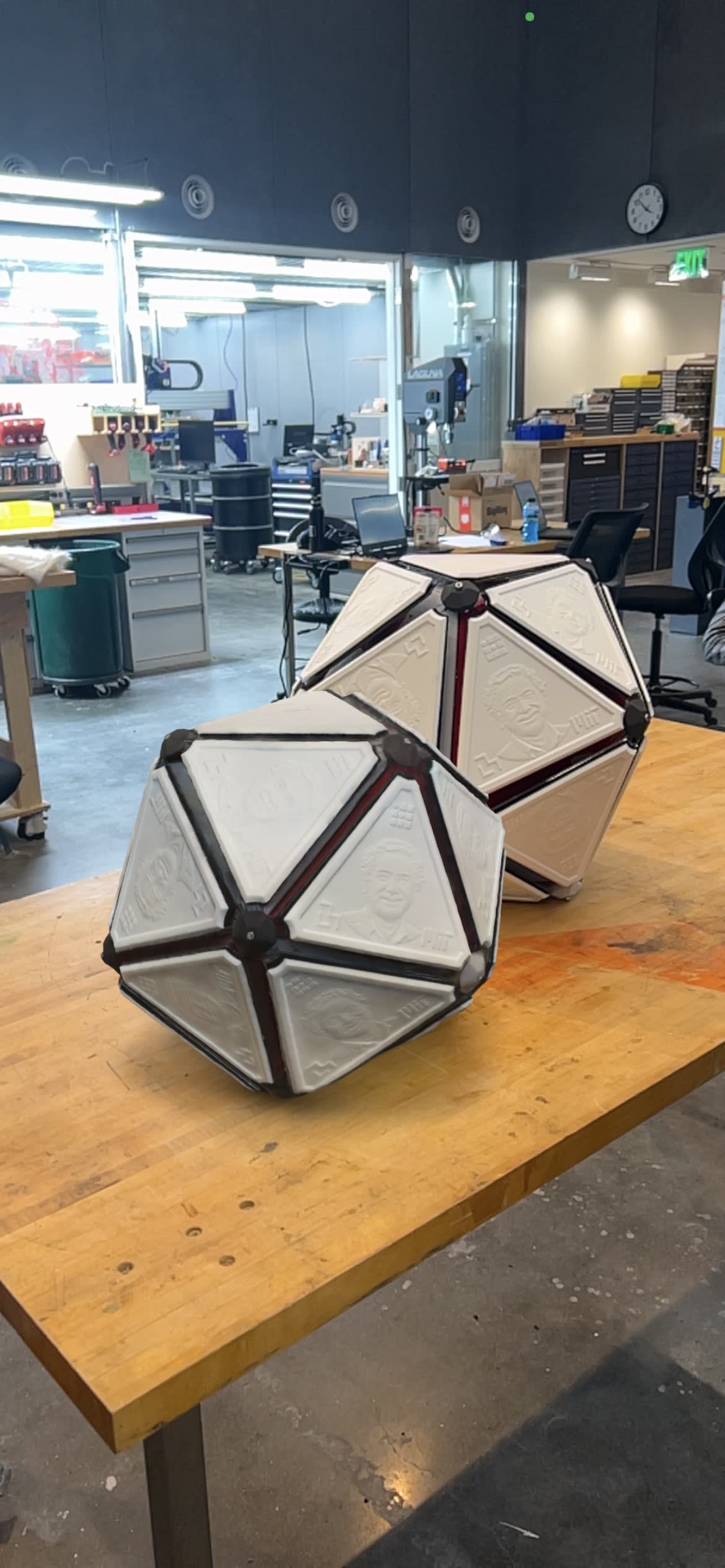
The completed actuated icosahedron with AR visualization overlay
My Individual Contribution
My specific contributions to this group project included:
- Software: Was involved in debugging the software and testing the system.
- Assembly and Testing: Participating in the mechanical assembly, troubleshooting alignment issues, and testing the integrated system
- Documentation: Doing video recording and taking photos for the documentation.
Key Learnings
Mechanism Design Complexity
Designing mechanisms that maintain geometric constraints while enabling motion is challenging. The icosahedron's expansion required that all 20 faces move in coordinated fashion while maintaining their angular relationships. We learned that mechanical systems need to account for tolerances, friction, binding, and backlash. What works smoothly in CAD often requires adjustment in physical reality due to these factors. Prototyping revealed these issues early, allowing iterative refinement.
Integration Challenges
Building a machine that combines mechanisms, motors, electronics, and software reveals the importance of system-level thinking. Components designed separately must work together - the motor torque must match the mechanical load, the power supply must provide adequate current, the controller must have enough I/O pins, and the enclosure must accommodate all components. We learned to specify interfaces between subsystems early and test integration progressively rather than waiting until final assembly.
Collaborative Design Process
Group projects require clear communication and task division. We learned to use CAD assemblies as shared reference models, maintain documentation that team members could understand, and establish regular check-ins to catch integration issues.
Final Project Planning
Project Concept: Piezoresistive Pressure Sensor Matrix Glove
My final project will develop a wearable glove with an integrated pressure sensor matrix using piezoresistive sensing technology. The system will create a grid of pressure-sensitive points across the hand using conductive thread woven into a custom-fit glove. Unlike traditional methods that require tedious manual placement and soldering of sensors, I'm developing a novel fabrication approach using 3D printed molds to precisely localize thread positions, combined with industrial sewing machine techniques for rapid, repeatable assembly.
System Diagram
The system architecture consists of several interconnected subsystems:
- Sensor Matrix Layer: Conductive thread woven in rows and columns creates a pressure-sensitive grid. At each intersection, pressure changes the resistance, creating a measurable signal. The matrix will cover key areas of the hand - fingertips, palm, and back of hand.
- 3D Printed Alignment Molds: Custom molds guide thread placement during sewing, ensuring consistent spacing and alignment. The molds attach temporarily to the fabric and are removed after assembly.
- Scanning Electronics: Microcontroller-based multiplexing system reads the sensor matrix by sequentially energizing rows and measuring column resistances, building a complete pressure map.
- Communication Interface: Wireless transmission (Bluetooth/WiFi) sends sensor data to a computer for visualization, recording, or integration with other systems.
- Glove Construction: Sewing machine fabrication creates the base glove with integrated sensor threads, combining comfort, durability, and washability.
Task List
| Task | Description | Duration | Week |
|---|---|---|---|
| 1. Material Testing | Test different conductive threads and fabrics for sensitivity, durability, and washability | 3 days | Week 12 |
| 2. Sensor Characterization | Measure pressure-resistance relationship, hysteresis, and response time | 2 days | Week 12 |
| 3. Mold Design | CAD design of 3D printed alignment molds for thread positioning | 2 days | Week 12-13 |
| 4. Mold Fabrication | 3D print molds, test fit on fabric, iterate design | 2 days | Week 13 |
| 5. Sewing Process Development | Develop technique for sewing conductive thread using industrial machine | 3 days | Week 13 |
| 6. Electronics Design | Design PCB for multiplexing and ADC, select microcontroller | 3 days | Week 13-14 |
| 7. PCB Fabrication | Mill or order PCB, assemble and test electronics | 2 days | Week 14 |
| 8. Firmware Development | Write scanning algorithm, calibration routines, and communication protocol | 4 days | Week 14-15 |
| 9. Glove Fabrication | Sew complete glove with integrated sensor matrix | 2 days | Week 15 |
| 10. System Integration | Connect electronics to glove, route wiring, ensure robustness | 2 days | Week 15 |
| 11. Software Development | Create visualization software, calibration interface, and demo applications | 3 days | Week 15-16 |
| 12. Testing & Calibration | Full system testing, spatial and pressure calibration, user testing | 2 days | Week 16 |
| 13. Documentation | Video production, slide preparation, final documentation website | 2 days | Week 16 |
| 14. Presentation Prep | Rehearse demo, prepare backup systems, finalize materials | 1 day | Week 16 |
Project Schedule
Week 12: Material testing and sensor characterization. Order all components. Begin mold design.
Week 13: Complete and test 3D printed molds. Develop sewing process with conductive thread. Finalize electronics design and begin PCB layout.
Week 14: Fabricate and test electronics. Continue firmware development. Refine sewing process based on test results.
Week 15: Fabricate final glove with sensor matrix. Integrate electronics and software. Begin system-level testing.
Week 16 (Final Week): Complete testing and calibration. Finish documentation and presentation materials. Final demo preparation.