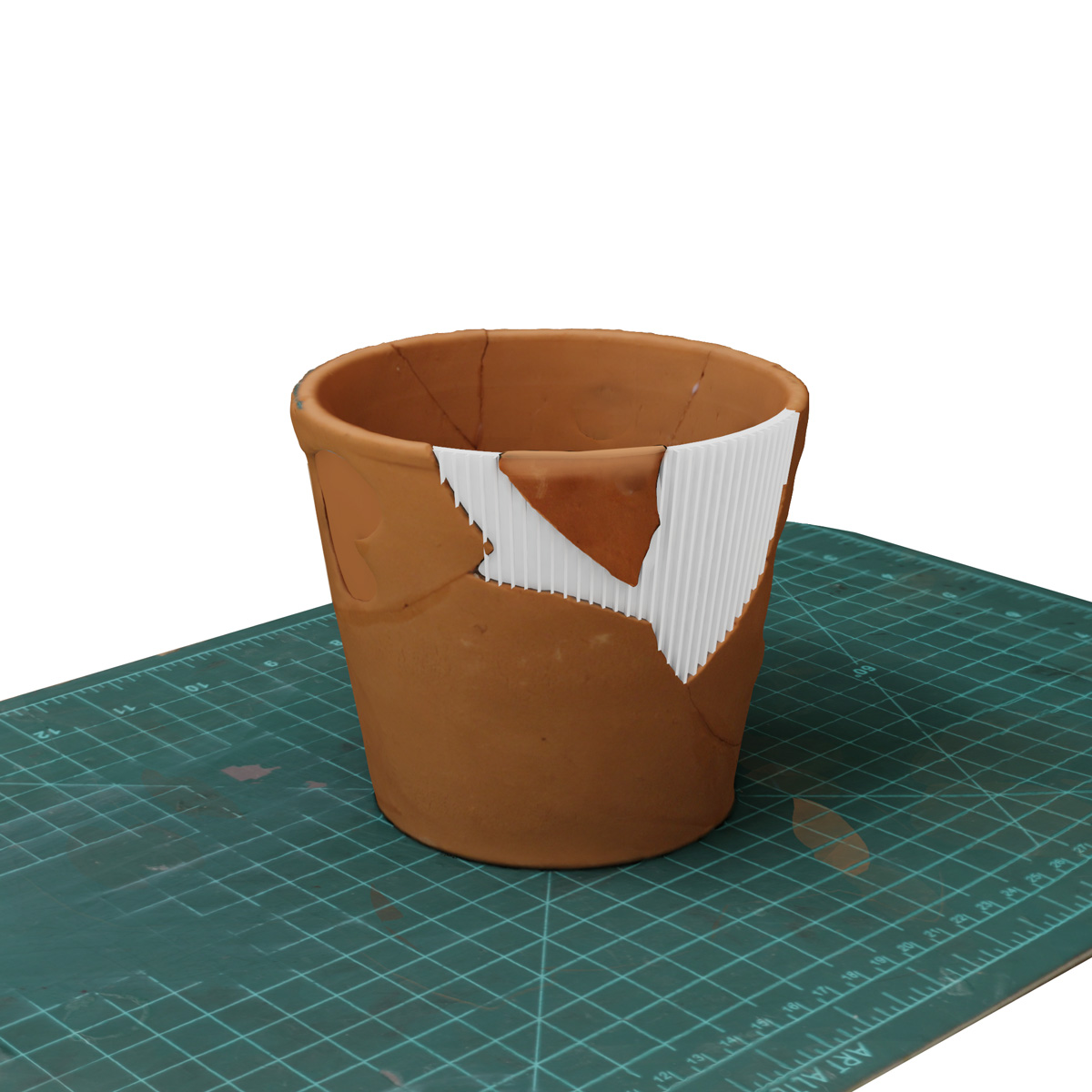
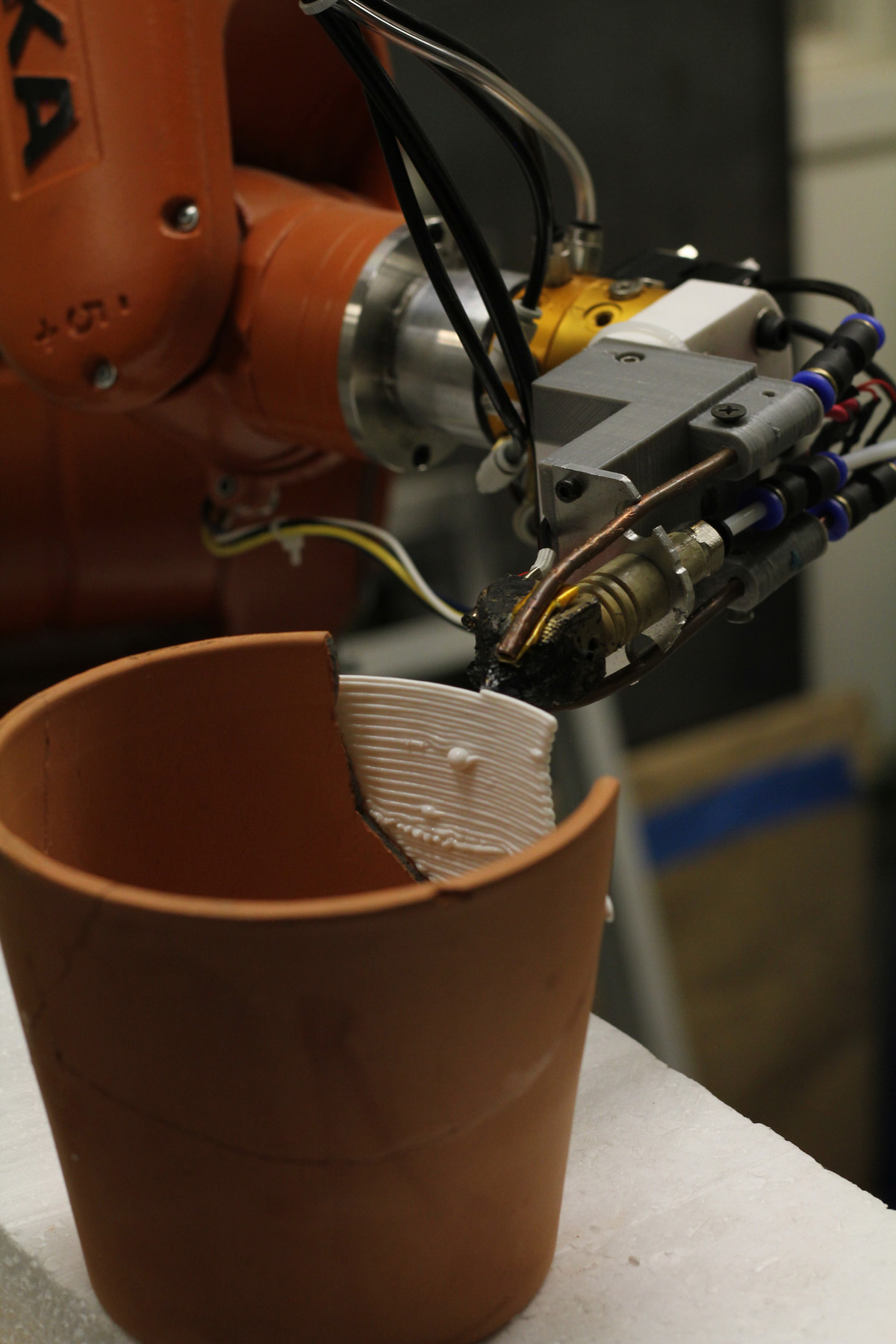
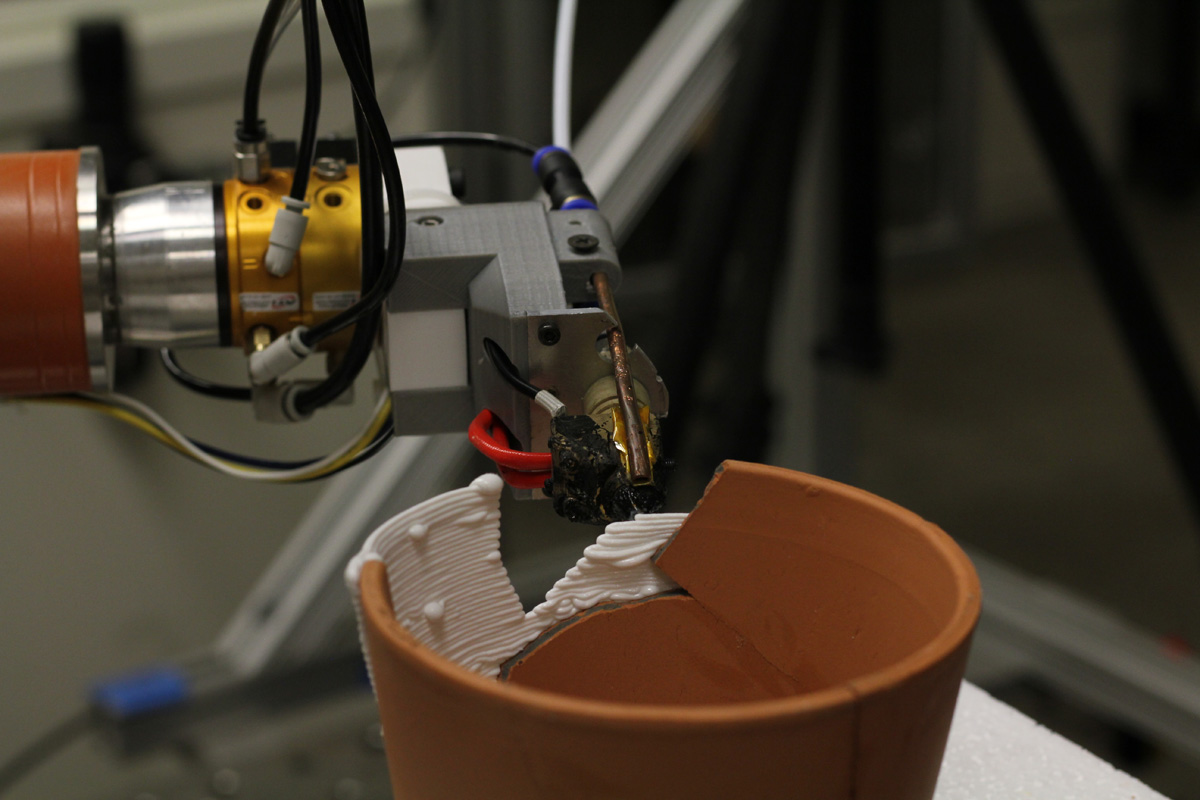
3D printing onto a scanned pot
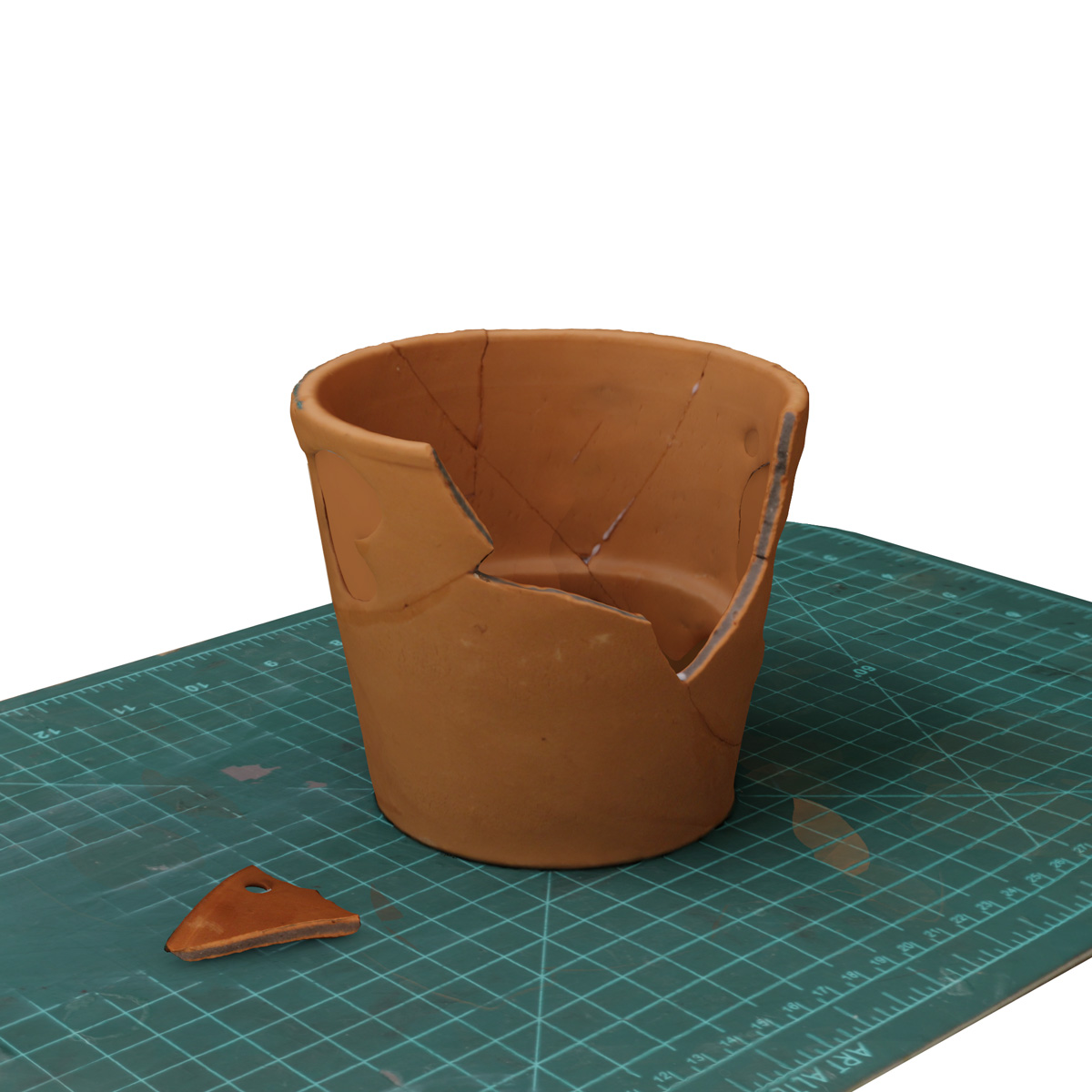
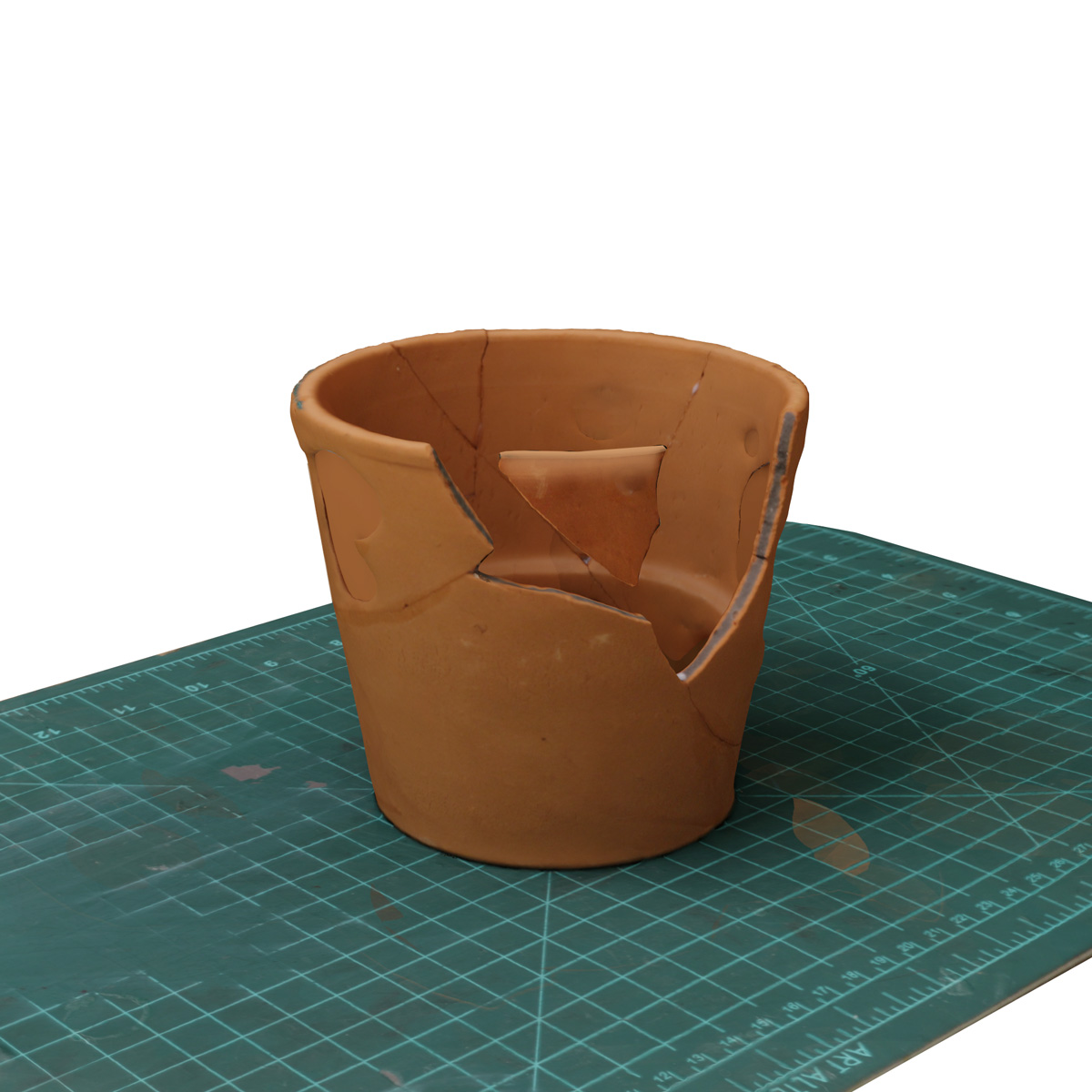
For this exercise, I have explored the possibilities of printing onto an existing object, rather than the flat bed of the 3d printer. In this case, I printed into a broken plant pot that I had at home, filling in the missing part. Printing directly onto the pot raises two issues, you need to know where the pot is in 3d space, and you need to have a printer that can deliver filament without colliding with the pot. As such, scanned my pot, and then planned to print with the RPL robotic arm, and 3d print attachment that Yijang Huang has developed for the MIT digital structures group.
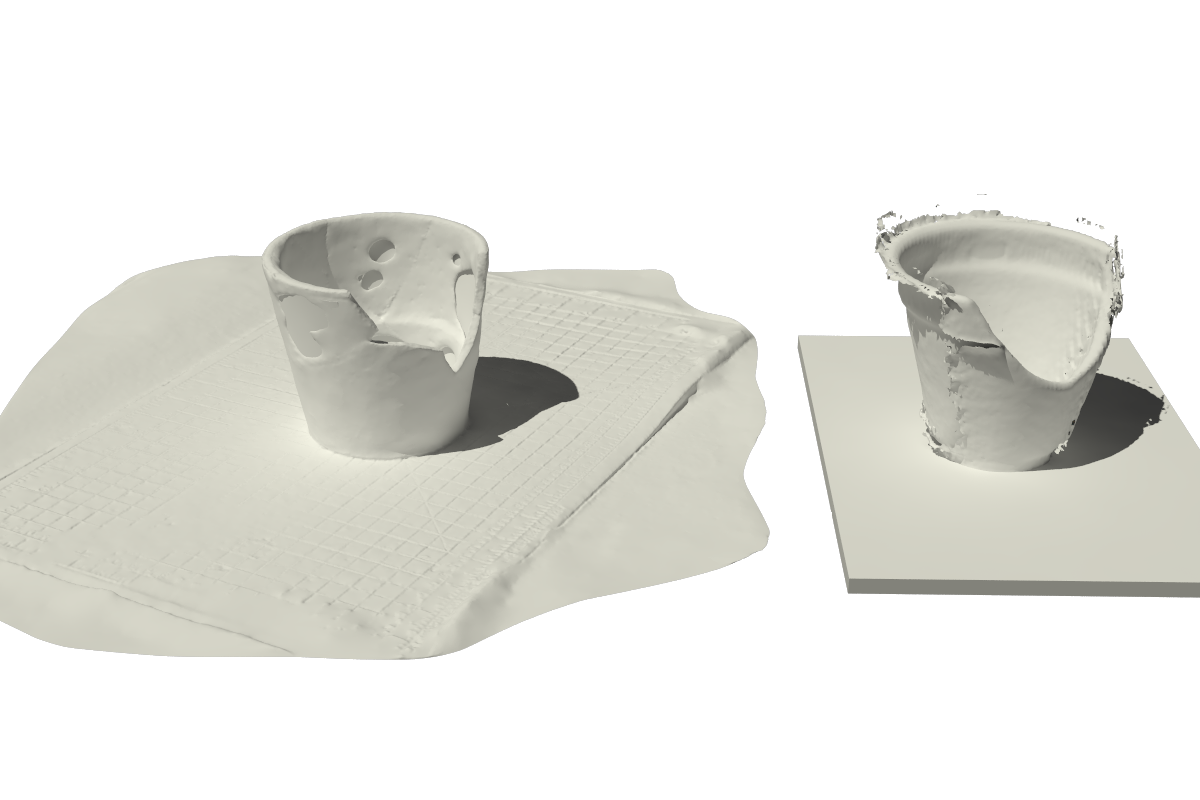
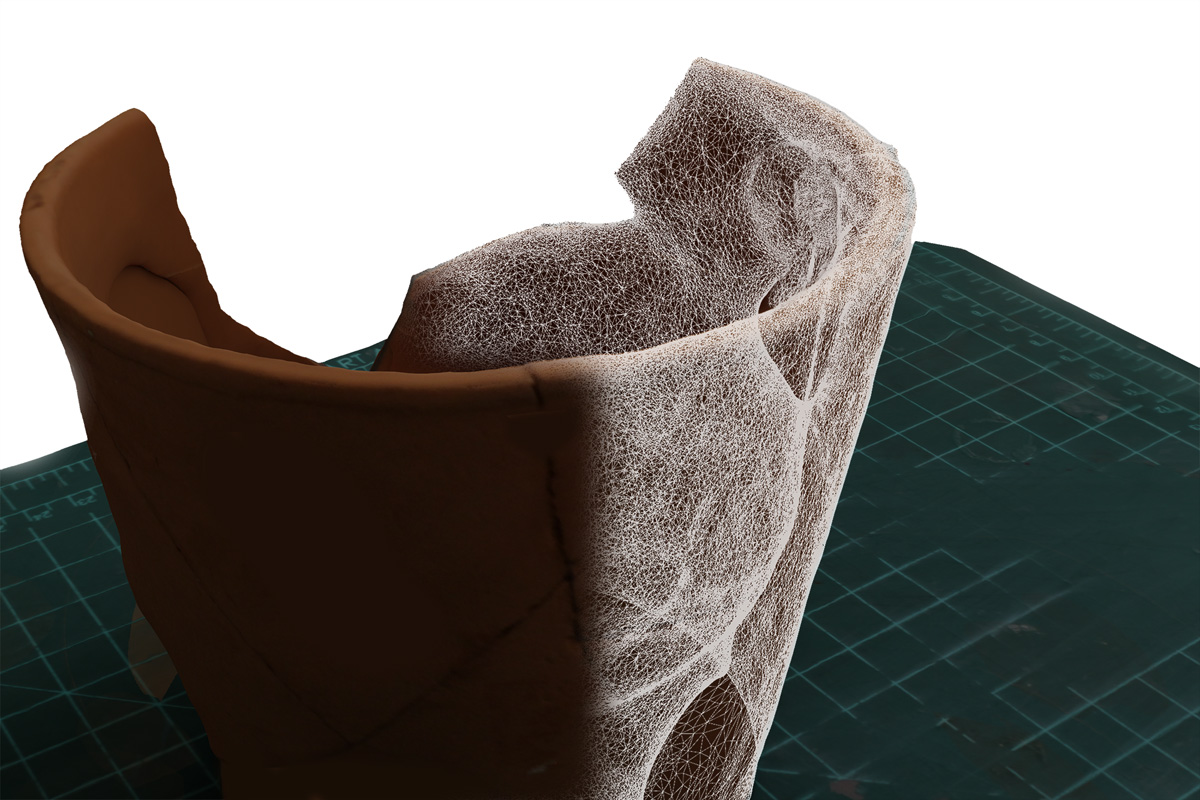
Firstly, I needed a good scan of the pot. I tested the Sense scanner (right), and Autodesk Recap (left). Recap was able to produce a very detailed mesh that even captured the texture of the pot, as well as the cutting mat underneath which I used to scale the object. The Recap scan was not perfectly accurate, or perfectly circular like the pot - but good enough to work with.

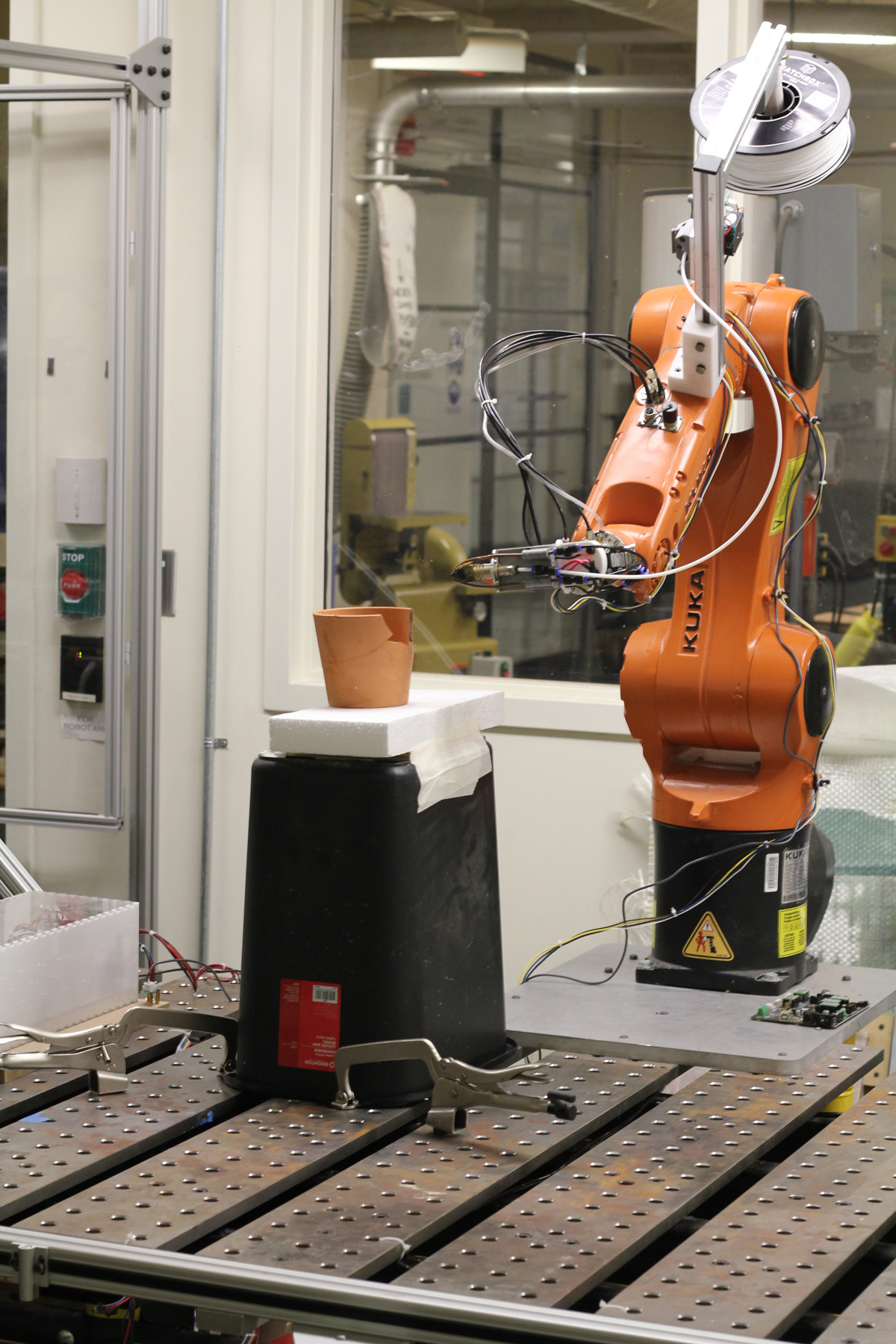
The Set Up
The set up was a bit of a botch. I used a bin, clamped to the table, and then taped this to a block of wood. The weed was screwed to the pot (through the weep hole at the bottom of the pot). This set up was good because it would allow the robot to press against the pot, and therefore the filament to spread out. Once the position was set, the pot was zeroed in 3d space by bringing three registratoin points from the robotic arm the grasshopper script, and moving the ditigal pot to that locations. This is an unautomated process - it would be interested in the future to find an more accurate and automatic way to interface between 3d scans and digital model environments.
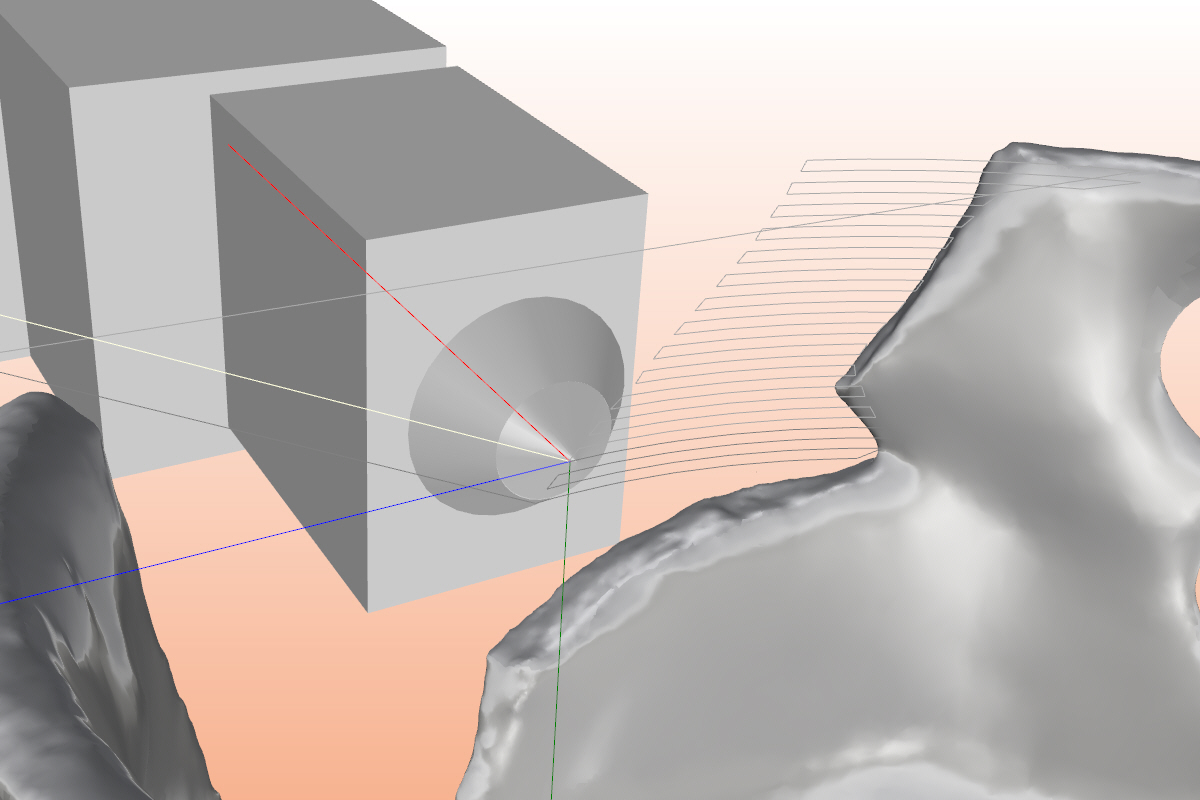
Toolpaths
Took the decision to go with a single layer print. This was because it is hard to fit the nozel into the depth of the pot, so instead, the toolpath would sweep around the pot, in layers that build up one wall thick. The toolpath had a nice zigzag to allow for continous extrusion, and time saving.

Thanks to Yijang for making a great printer, and for helping me to complete the project!