Output
This week I attempted to use a very low power servo motor. The small device is intented to just sweep some light weight geometry and so it can be very low power. As such i decided not to use a in curcit regulator, but just run the servo motor off the USB 5 volts.
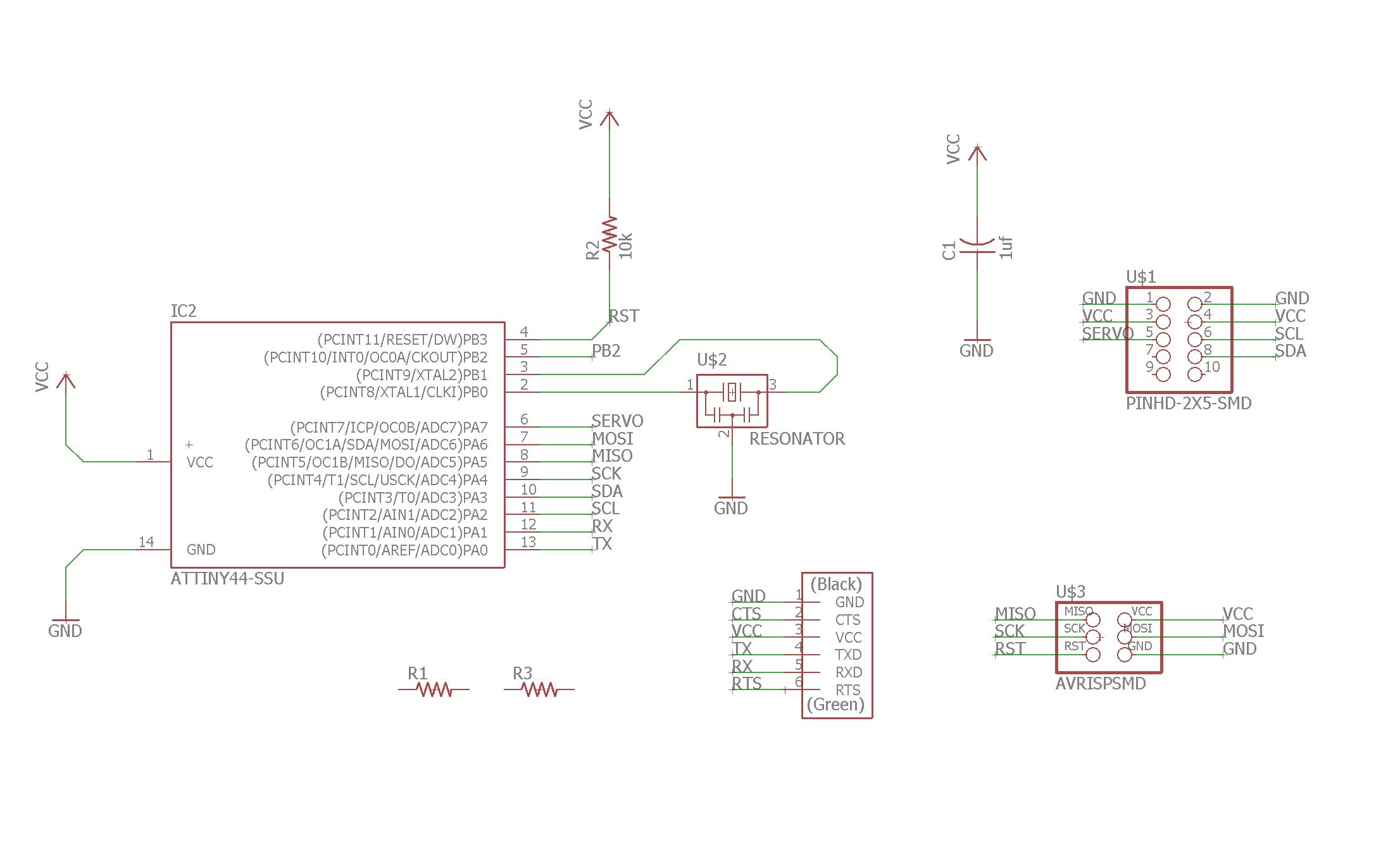
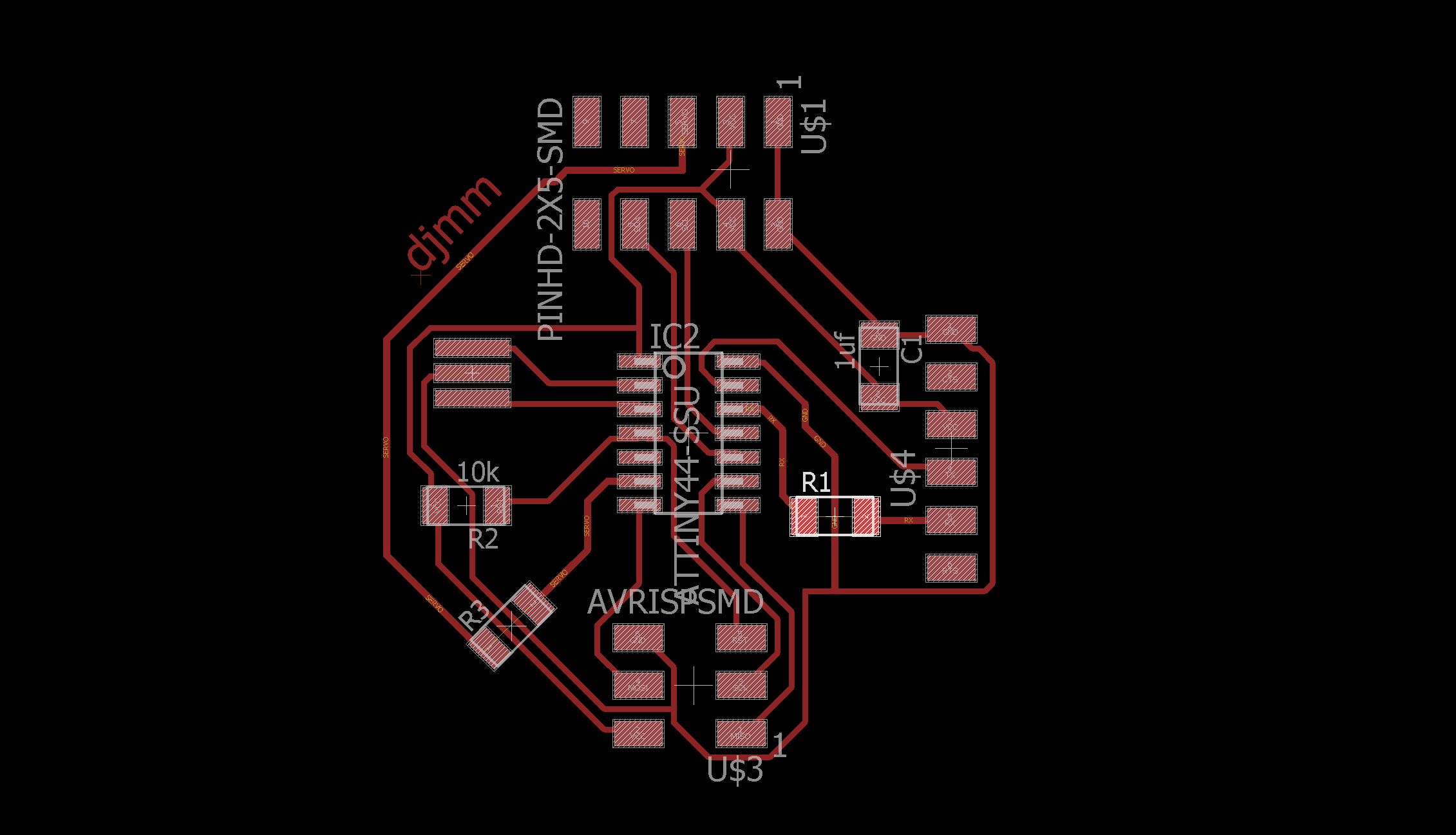
I had some problems early on with this project due short curcits on my board. The endmill that I used was a little chewed up, and the copper traces were broken in some areas. When I tryed to program my board it couldn't be recognised. Jonah helped me to think the problem through, and find the problematic short between MOSI and GROUND. This problem was also because the .dru file was not attached in eagle, meaning that the traces were a little too thin. I attached the correct dru file and was able to autoroute thicker copper traces. This new board programed first time around.

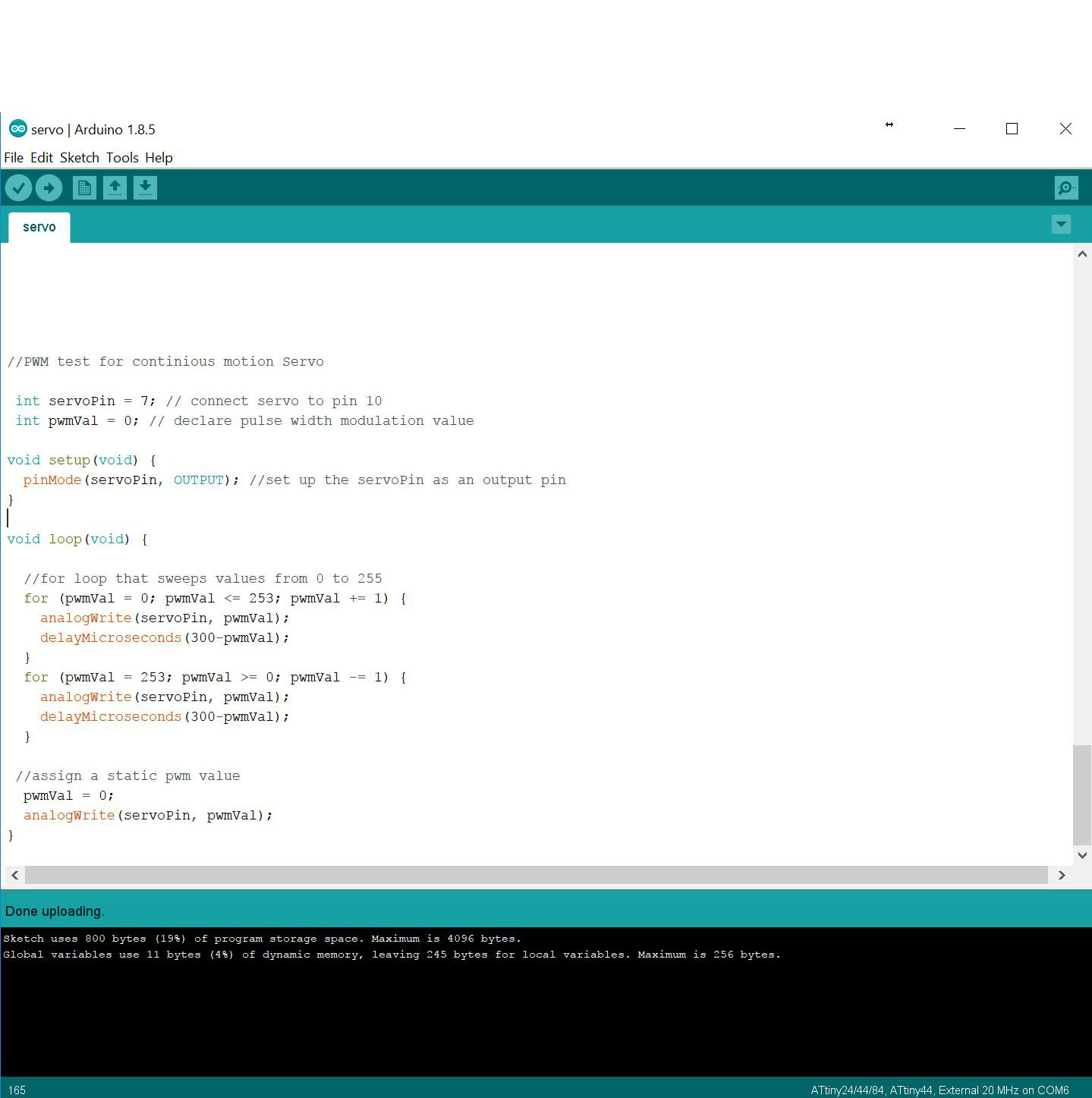
Once the board was programming ok - I developed a script to toggle my light weight servo motor back and forth. I wanted the sweep to be 180 degrees, and after some time learning about pulse width modulation, was able to come up with a script that could increase and decrease a series of beeps to my motor.