Vango
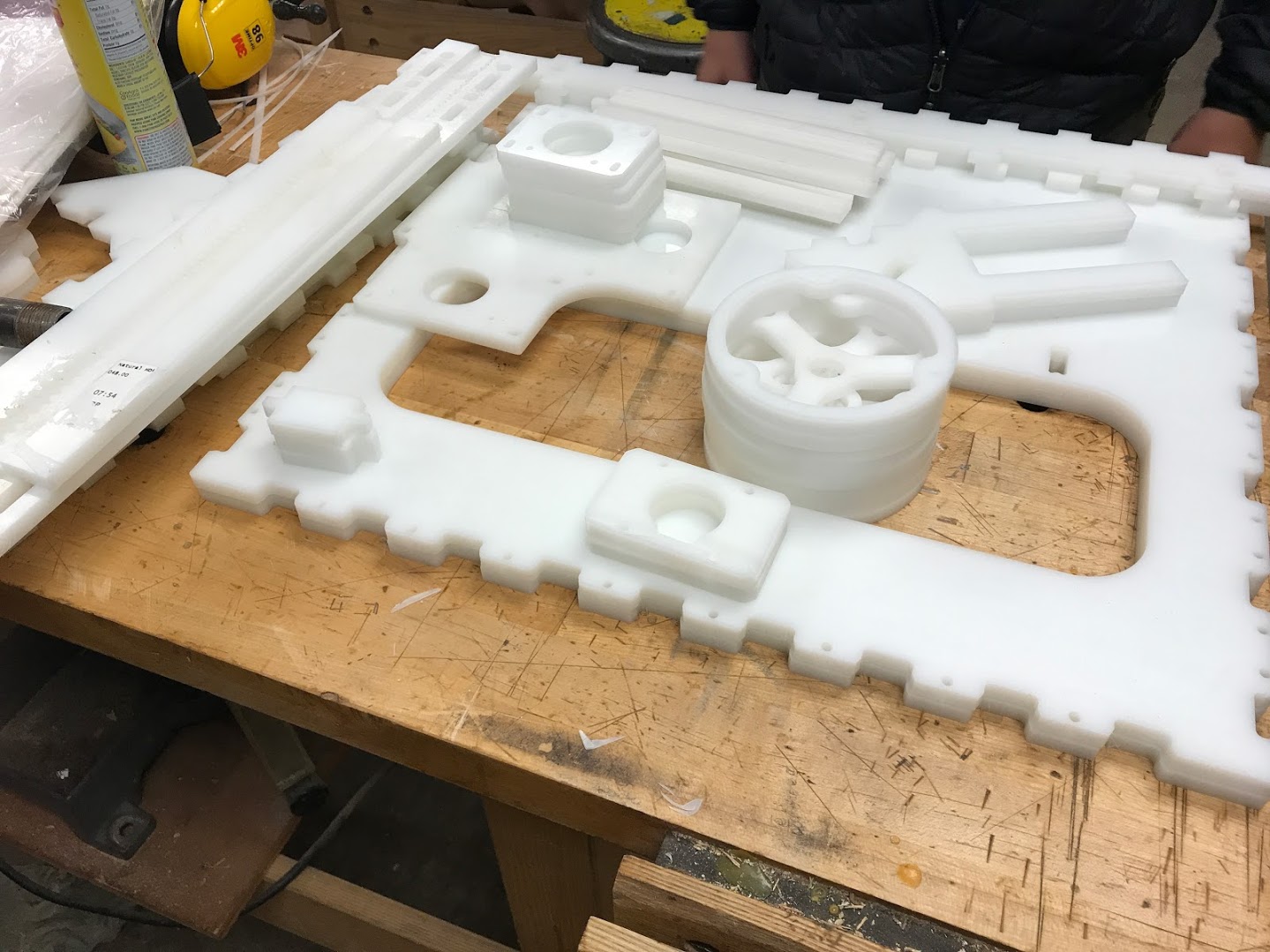
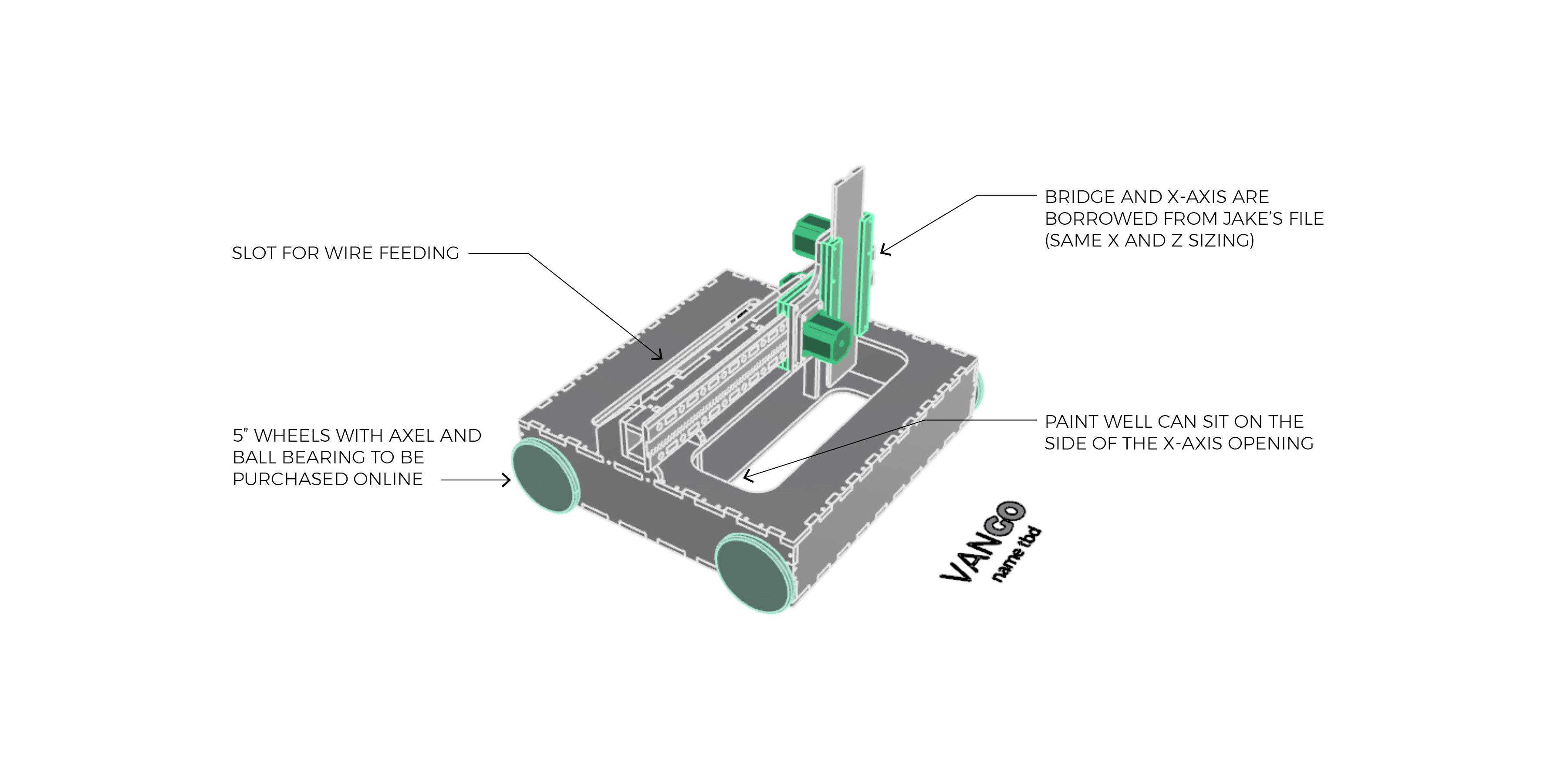
This week we made a robot for patining on large sheets of paper. The Van go can move and plot at the same time. I took on the task of milling and fabricating the parts.
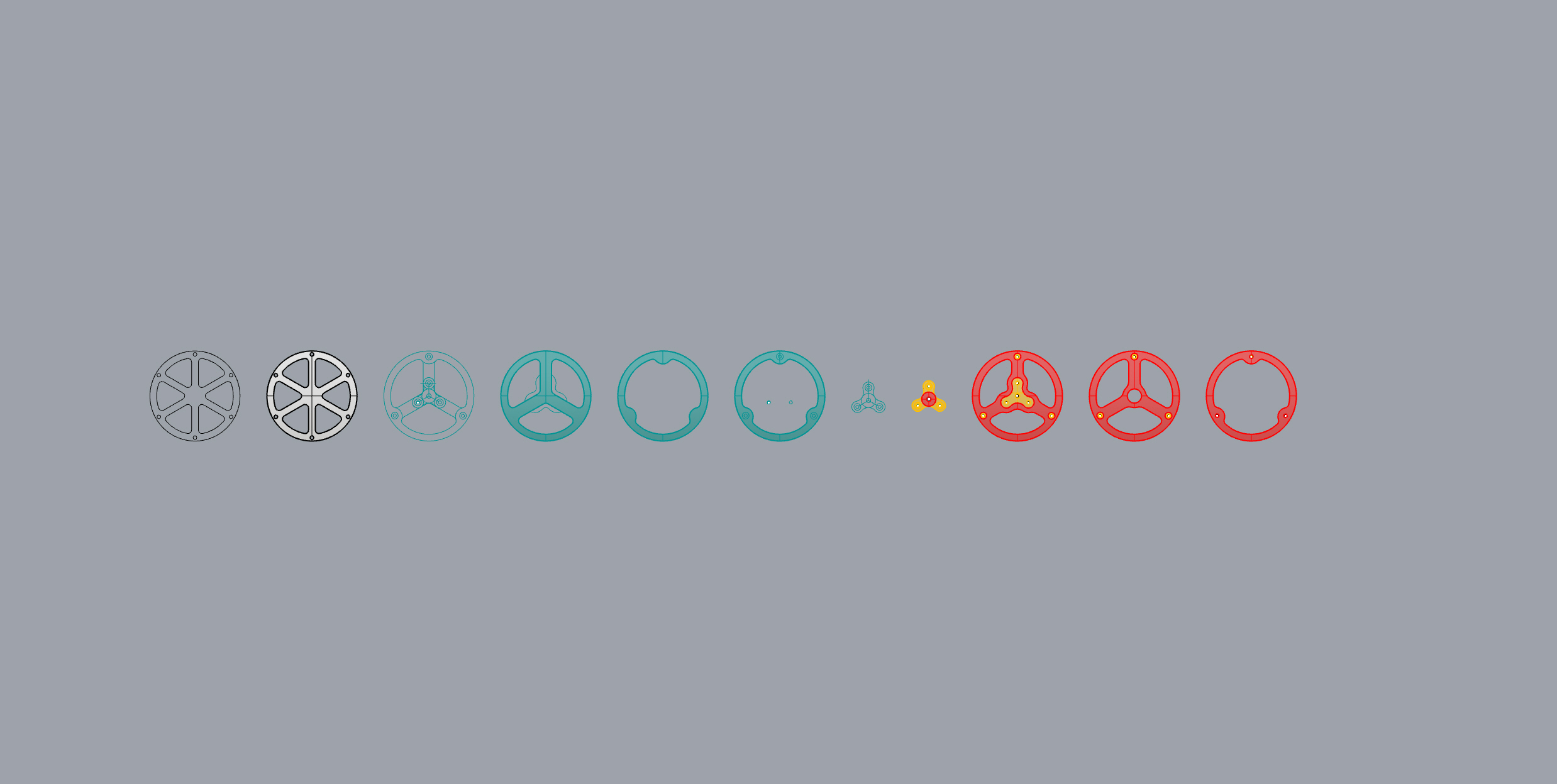
The first mistake that we made was in the wheel fabrication. The screw used to bolt around the shaft was complicated with the addition of a ball bearing joint. In the future one could imagine a joint that locks around the wheel in a more practical way. You need to think about assembly sequence when you design something. So i've made a gif to highlight the error.
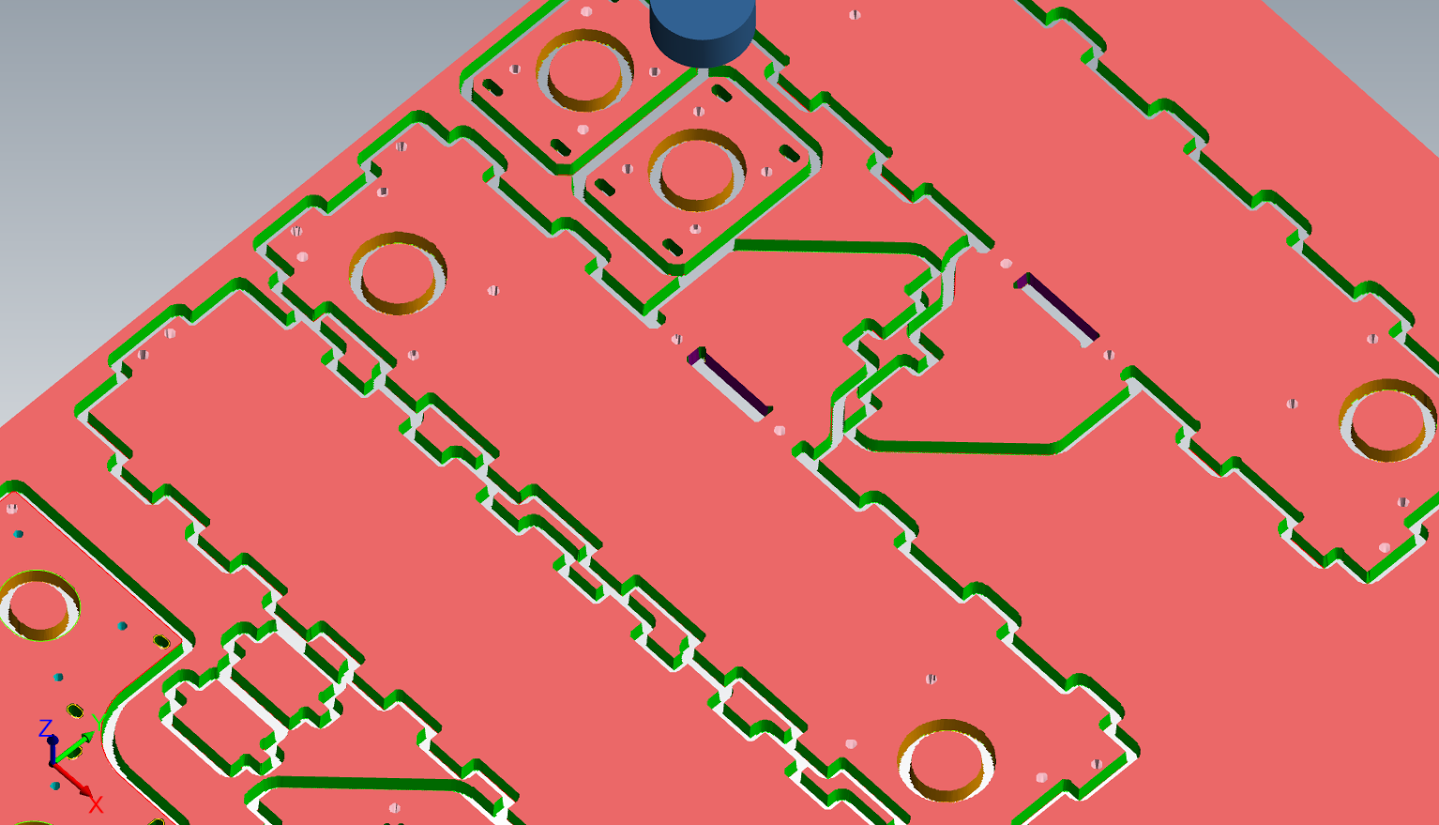
To set up the mill files we had to convert the geometry into something that Mastercam can read. This was a little less efficient than the fusion workflow. Next we laid out the the sheets using neat layers - to make it easy to grab each toolpath.
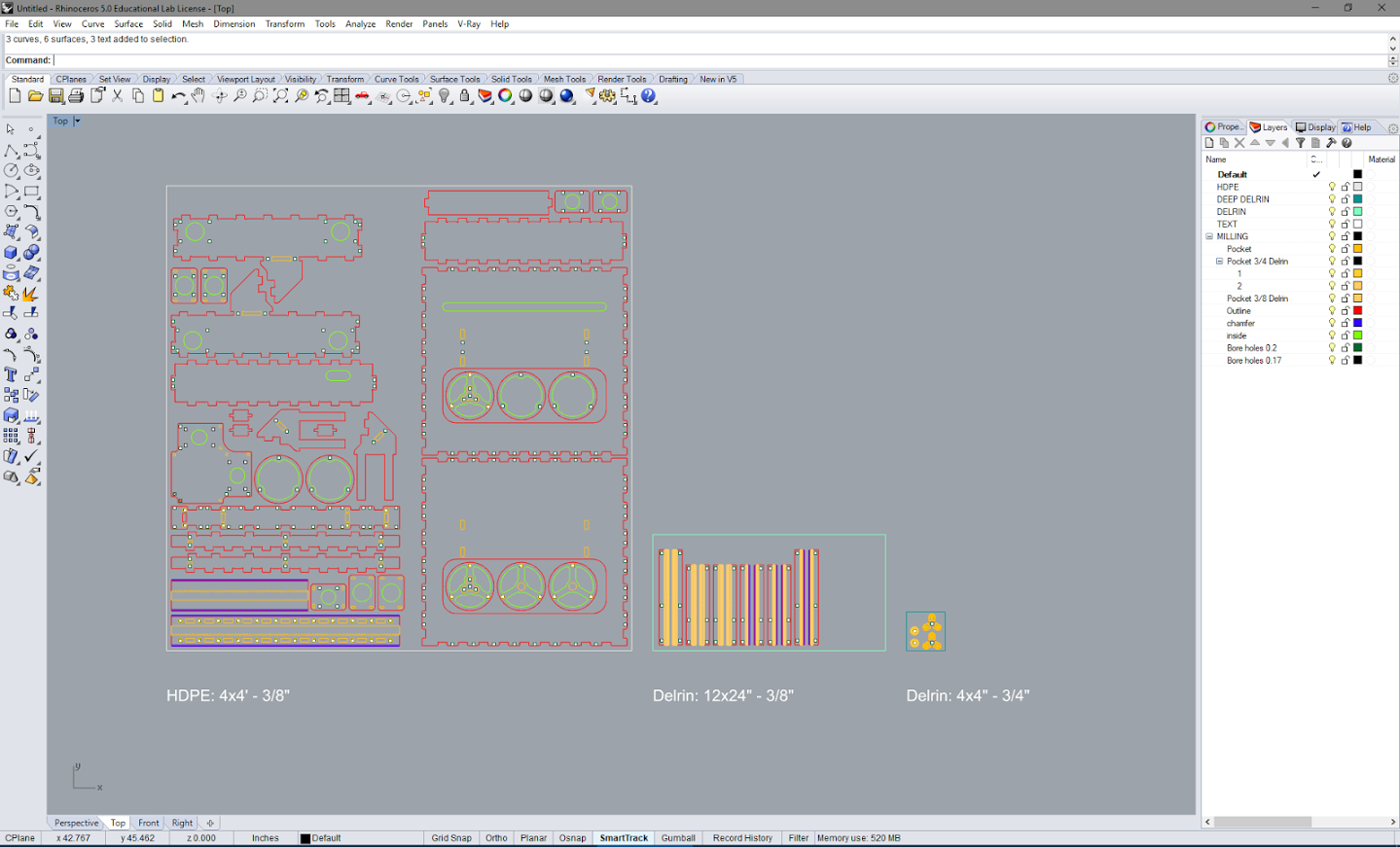
The second major mistake that we made was in cutting outlines in mastercam. We decided to go for a onion skin manufacture, with a cut down to 0.035inch, and then a final pass to shave off this thin piece of plastic. This failed because when the onion skin was cut, the piece became loose, and the part flew out of position. A few of our smaller parts flew out of the bed during manufacturing - and on reflection i would have prefered to screw it down to the bed, shopbot style.
A final issue with the milling, was that we put the parts too close together. This meant that lots of small chunks flew off the bed during manufacturing. We stoped the machine to lean in and move them off the bed, but this is dangerous practice and not to be reccomended!