Software
Since I had already done a special PCB and programmed it two weeks before, I decided to catch up on some projects. I redid the PCB to a sligthly nicer version, I 3D printed a housing for my fan-agent design (see final project pitch), and laser cut the 'fans'. Next I programmed it.
Then I took the opportunity to redo my mold from last week (make it nicer), and my chair from the SomethingBig-week, -and added an ottoman and a table just for kicks!
Software (and some other stuff)
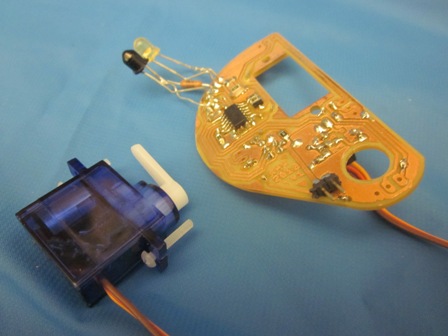
PCB (milled in modella):
|
|---|
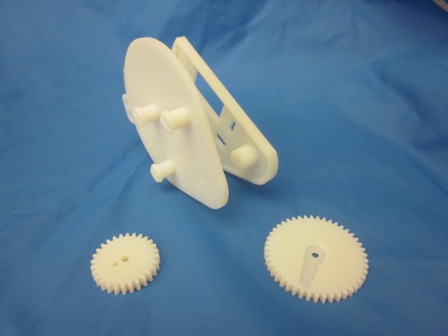
Housing+gears (3D printed):
|
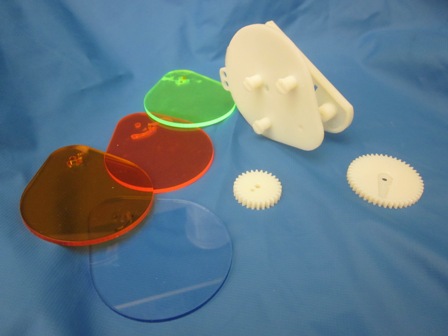
Fans (laser cut acryllic):
|
Program (AVRstudio) while(1) if(readIRavg || readIR) } |
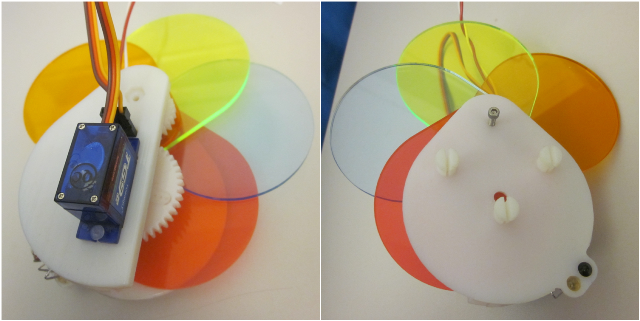
Assembly:
The PCB still needed a bit of hacking to work properly, but next version will be perfect(!)... Here's a video of the current progress: |
| Molding&Casting in chocolate! |