wk00 ~ final project concept
This concept is still quite early stage, but I have been interested in the idea of creating tactile augmentations to CAD
(e.g. here; some experiments into auxetic connectors );
e.g. a tactile mesh that we can manipulate to play around with different shapes/connect this to CAD?
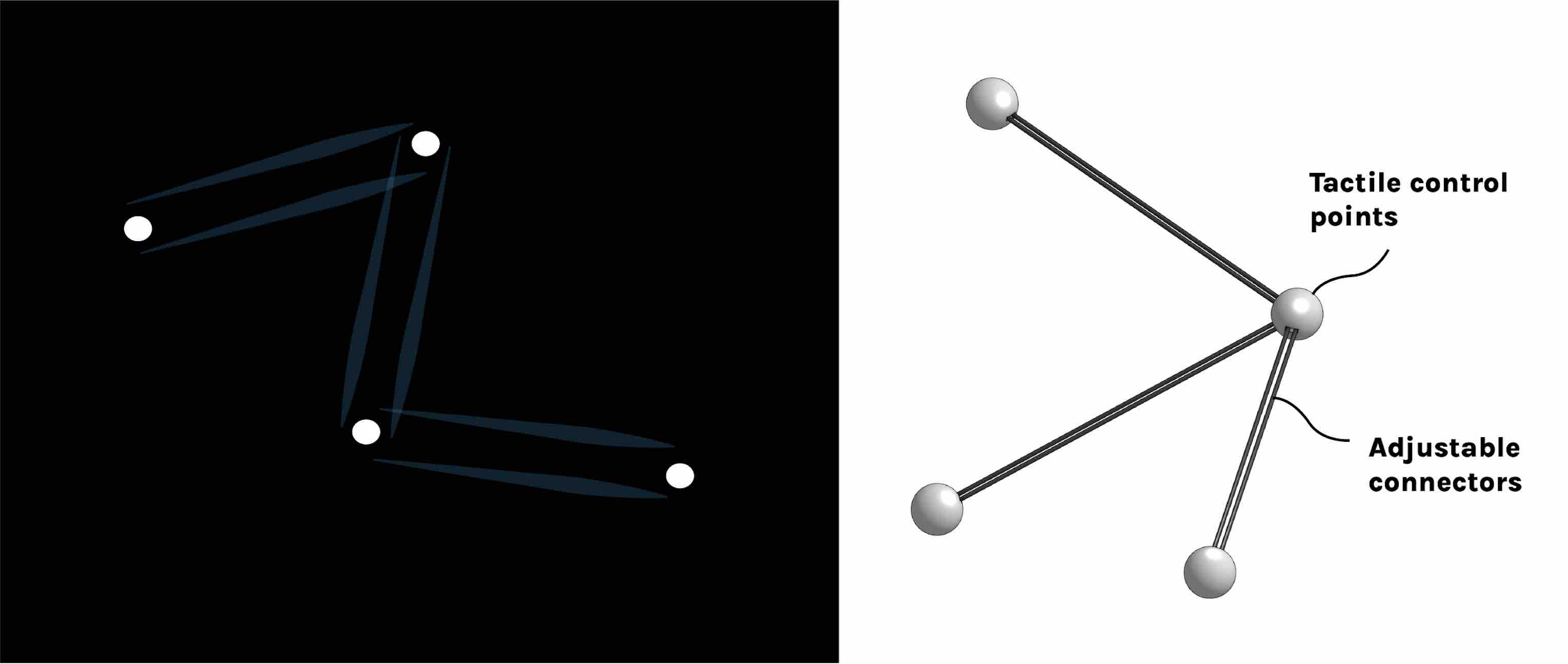 Tactile 3D sketching nodes; concept illustration and CAD sketch in Onshape.
Tactile 3D sketching nodes; concept illustration and CAD sketch in Onshape.
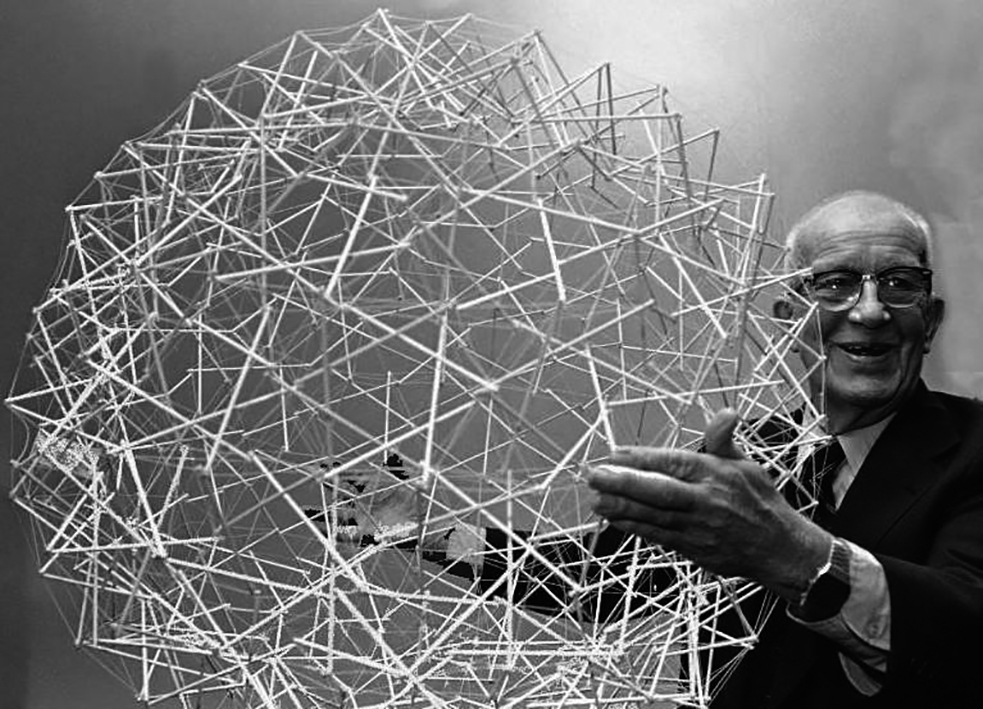 Buckminster Fuller holding a tensegrity sphere
Buckminster Fuller holding a tensegrity sphere
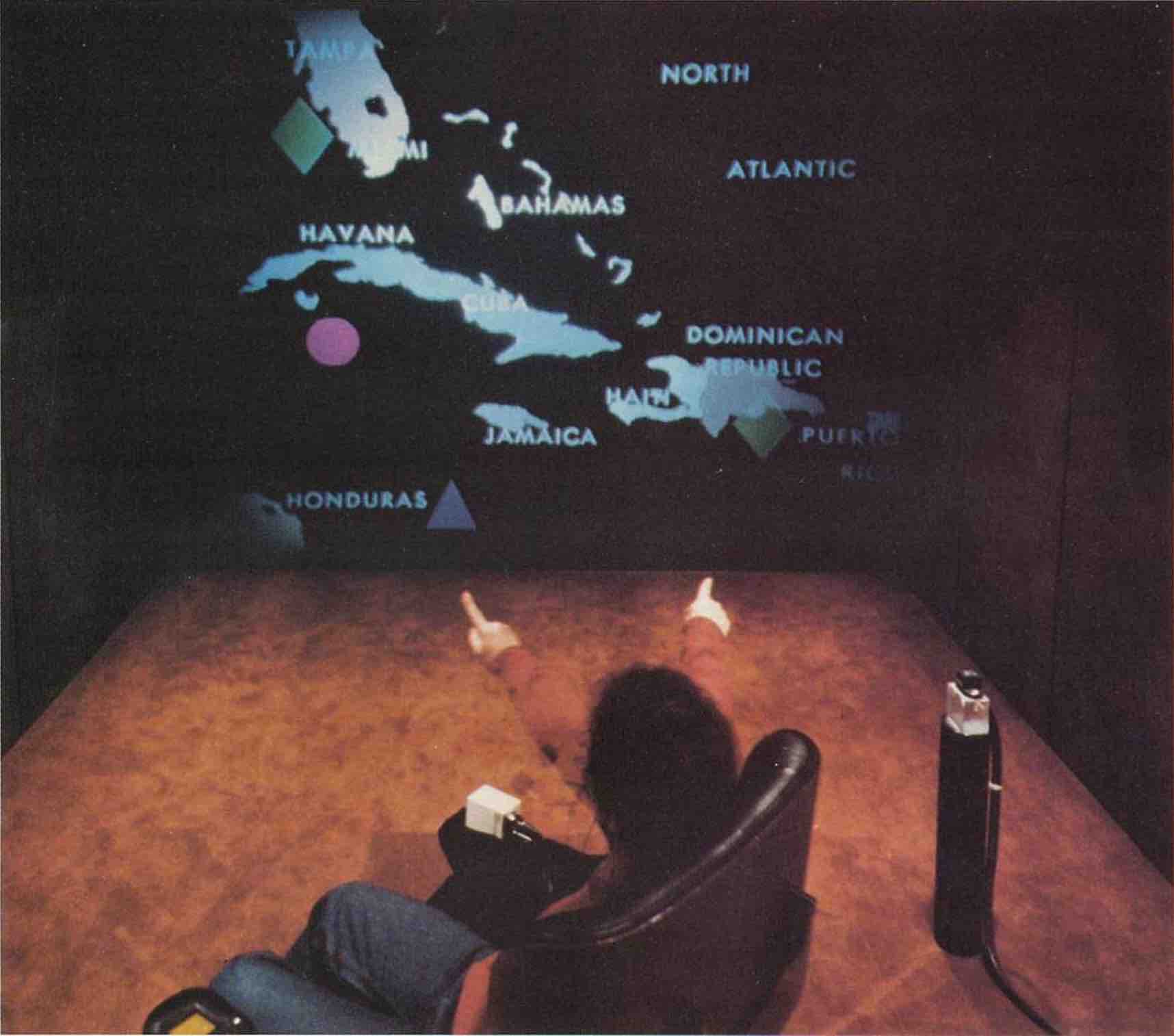 Early gestural interface, Bolt et al "Put that there" 1979, MIT.
Early gestural interface, Bolt et al "Put that there" 1979, MIT.
I regularly use Onshape and Solidworks, but have been meaning to get into Blender. I imported the model as a .stl into Blender,
and started to duplicate/rearrange some of the parts I had made in Onshape. Some random Blender commands (mac) that I found useful (mostly for future me) ~ G key to move (+ Z to move along normal),
align active camera to view ( cmd + opt + 0 ), 0 to look through the camera, R to rotate, .
to toggle the pivot point (it was helpful to work with the 3D cursor as a movable pivot), F to add a face between selected vertices, shift + A to add an object/mesh to the scene, fn + F12 to render, Z to toggle between render/normal views.
For spinning a camera around an object: it makes sense to pair the camera to an 'empty' object centred at the object ( Cmd + P to pair the camera and object).
cmd + L , to link two selected objects (e.g. to give them the same material).
Render tests, Blender
Spinning the camera
Plan going forward ~ relative positioning will be important regardless of how this concept is implemented,
so I will try to start working with accelerometers ASAP. Simply attaching an accelerometer to a pen and
trying to infer the position + visualize it on the computer could be a good first step.
* web development note ~ I liked the layout of
Gil's 2020 HTMAA site and will use it as a starting point to develop this site.