Here is my first attempt at rendering an astronaut smart boot.
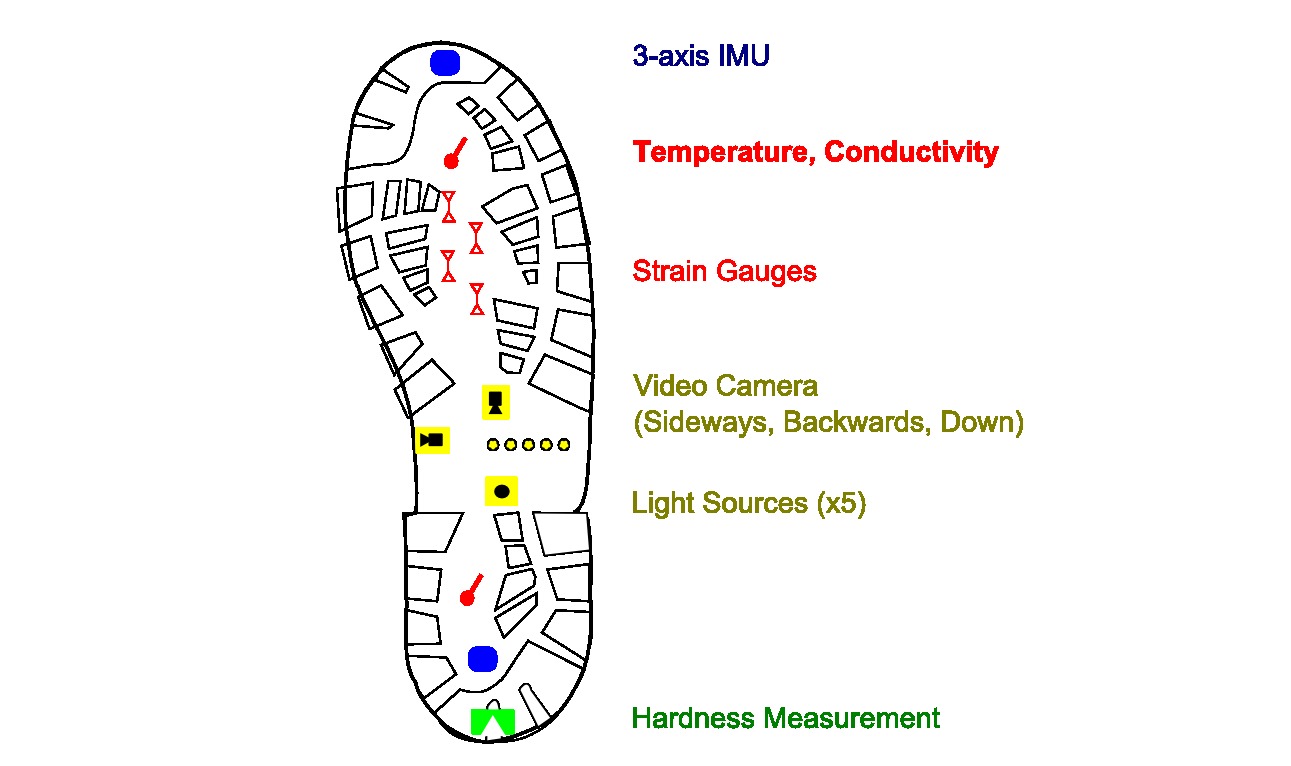
The sensors are placed at specific position on the sole of the boot. Heel and toe inertial sensors measure the motions of the foot during the gait cycle. Temperature and conductivity are measured between the toe part and the heel part of the sole. Strain gauges mounted to the central nubs of the tread, measure sheet and traction forces during the ground-phase and are used to indicate slippage. The cameras and light sensors are positioned so they are protected from the heel strike and walking motions. Finally, a piezo-electric device is loaded during every heal strike and determines the hardness of a small soil sample.