Planning far ahead
Week 0
The idea for making weight lifting machines that created energy came from my friend Nick while brainstorming for cool machines to build.
My design is inspired by bicycles that can create electricity by using the pedaling motion to rotate a wheel which would then rotate a tread that would rotate a motor, creating electricity.
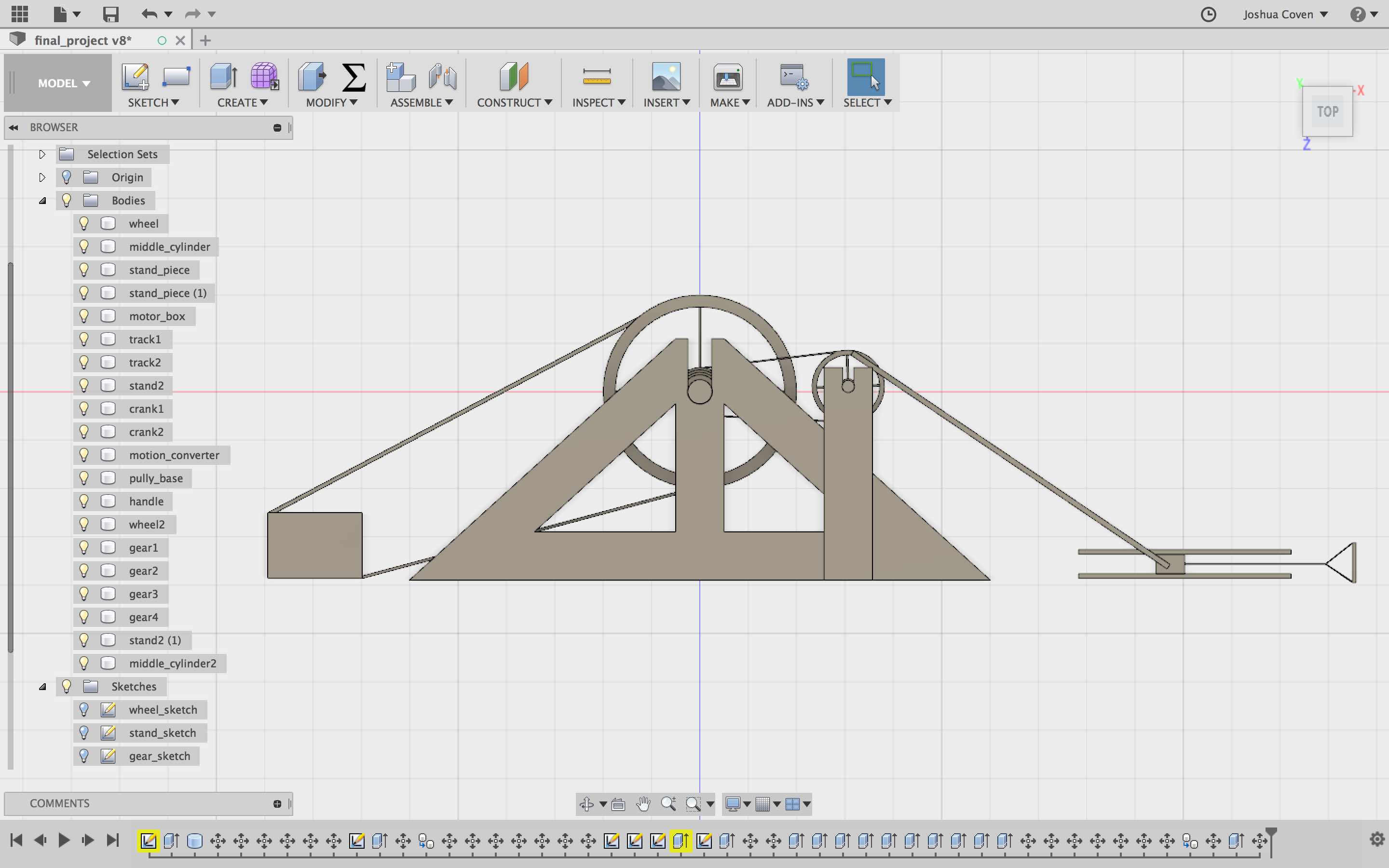
There are two main mechanical puzzles I thought about in the design process. First, bikes that create electricity use the circular motion of the pedals to spin a wheel which creates energy. The act of lifting weights in most exersizes is a linear motion, so I added a couple parts that convert the linear motion of pulling a handle into circular motion that spins a wheel. The interesting piece comes from the fact that everyone has a different range of motion and every exercise requires a different range of motion. If the piece connecting the second wheel were fixed to the circumference of the wheel, the range of motion would be limited to a maximum of the diameter of the wheel. I would make it possible to extend this piece to account for the different ranges of motion of the users.
This wheel would then be connected to a second wheel with gears leading us to the second puzzle. To provide resistance to the handle equal to the resistance some exercises provide would require a very large gear ratio. This is a puzzle I will continue to think about as the project progresses.
At this point I have a new final project idea for a couple of reasons. First, this project would be extremely complicated and time consuming. Second, even if I were to build it and it were to work perfectly, I don't think people would enjoy using it. It wouldn't function like a typical weight lifting machine and it also wouldn't generate that much energy.
Pushing a wheel is difficult at first and once the wheel starts moving it gets easier and the force required to accelerate it again once it is already moving is lower than the first effort. This is not the same in lifting a weight where the force is constant throughout the lift. Also, a key part of weight lifting is the effort exerted when moving the weight downward or in reverse motion. Some experience weight lifters contend that it is much more important to have a good and slow downward motion when lifting because you exert force while extending the muscles. The force on the downward motion from the wheel would be much lower than the force on the upward motion, so those who are used to lifting weights would not get the same downard force. Many who work out regularly have routines and a machine like this would not only break a routine but also provide a less effective weight lifting experience.
My new project idea is a smart chess board. As a very average chess player, I'm always trying to improve my game. The biggest part of this is running my games through computer analysis and then learning from those where I made mistakes and why. When you play a game in real life, not on the computer, unless you write down every move it is difficult to analyze your games. I would like to make a chess board that records where each piece on the board is, keeps track of all moves, and makes it easy to export the moves to a computer where you can later run a computer analysis.
There are additional features I would like to add if time permits. A display that keeps track of score would be an interesting feature because it could recognize all the pieces still on the board, assign a point value to each, and then display the difference.
I would also like to add a built in clock. I haven't decided yet if I would make it so there are buttons on the board you would click to mimick a real chess clock or if the board would recognize when a move has been made and keep time automatically.
It would also be incredible if the board had hinges halfway across so it could fold up and be easily carried with a handle.
I have a few ideas at the moment for the board to recognize pieces. The most promising of them is to have each square be a side of a capacitor with foam protecting it. Depending on the mass of the piece on it, the distance between the electrodes would be smaller or larger returning different inputs to a microcontroller. The controller would read the distances between the electrodes on each square to identify the pieces or non-pieces on each square.