Final Update
Link to final presentation
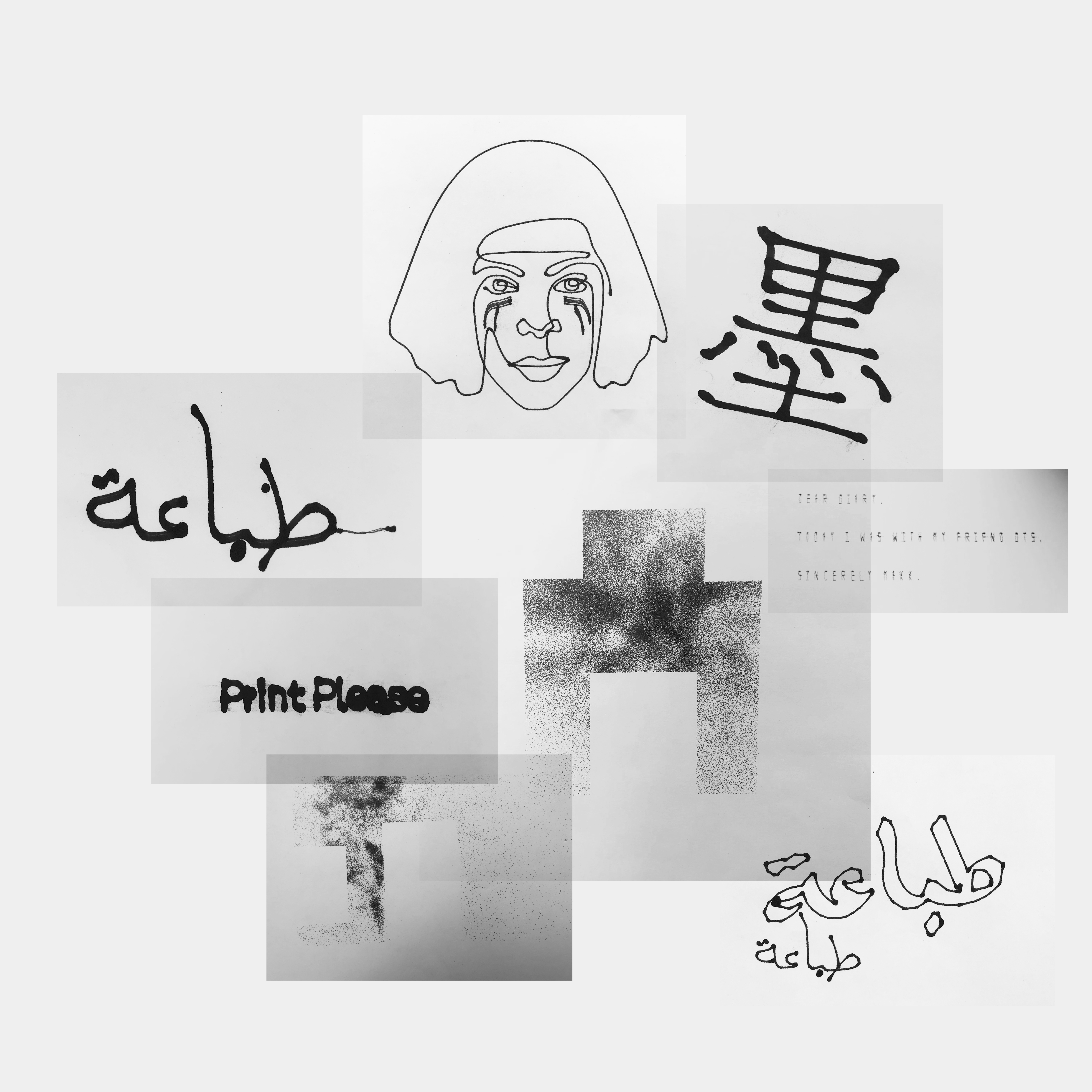
Some prints we made last week

Here is a sample code for the letter L
Here is a sample code for the letter L