
Week 13: Wildcard week
Soft Robotics
This week we had to make our own assignment. I wanted to make something related to soft robotics. I teamed up with Ravi to make a soft robotic arm. We attended the recitation in Harvard on soft robots.
Key takeaways:
Soft robots usually comprise of a flexible layer and a stiff one.
They can be pumped using air and water. The differences in the stiffness would cause them to flex and move.
Here are some of the devices we used and tested in the recitation
Ecoflex used in mold making
A simple soft robots that bends when air is pumped through the inlet

Usually any soft robot consists of two layers as seen in the following image

The stiff layer is made by gluing a cloth on the layer using the mold mixture.

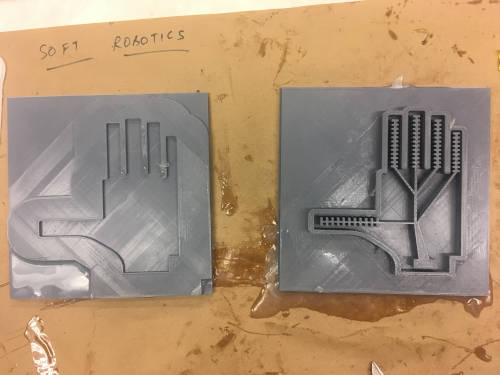
Here is a Soft robotic handI designed in solidworks. Two molds one containing air pockets and the other a plane layer.
Steps followed:
1. 3D printed the molds
2. Used Ecoflex PartA and PartB in equal proportions to make a uniform mixture
3. Poured them into molds and let it cure for 4 hours.
4. Removed the casts and inserted a valve in between the layers and glued both layers with the valve using Ecoflex mixture again.
5. Made sure there are no leaks
6. Glue a stiff cloth on the plane layer using Ecoflex mixture.
7. Let the hand cure for four more hours
Here is the final result

It folds as we pump air through it!!!