Week 03 — Embedded Programming
Group Assignment
For this week's embedded programming assignment, our lovely architecture group struggled a bit. Luckily we all gathered as a group after recitation to brain storm the group assgnment prompt and got help from Neil's not TA and fellow classmate Kat.
For us to approach the work, created a large group document with our final project interests, a microprocessor chip we were interested in, and their capacities.
My final project (at the moment) involves motion sensored light depending on the distance, and after looking at the three options we decided in class I landed on the RP2040 and Raspberry Pi Pico.
Here is a link to the shared Google Doc we all worked on, but for ease of access I've copied over my notes below.
Use Case / Application 9:
Dimmable motion sensor LED with tracking abilities
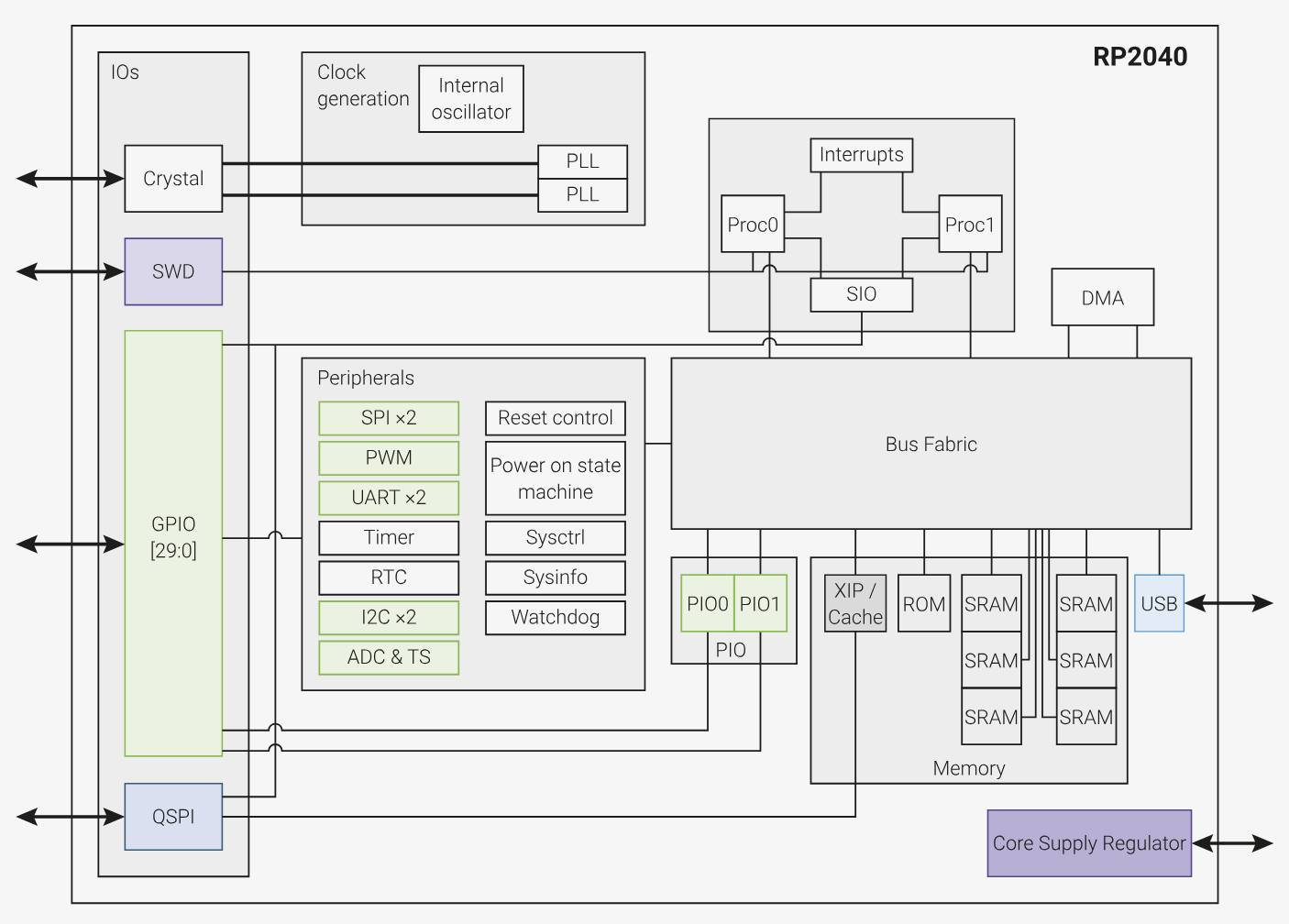
Chip: Raspberry Pi RP2040
Capabilities
- 32-bit dual-core
- 133 MHz clock (250 MHz+ over-clocked)
- 264k SRAM (for running programs and handling variables)
- 2 MB onboard flash memory (for storing programs and data)
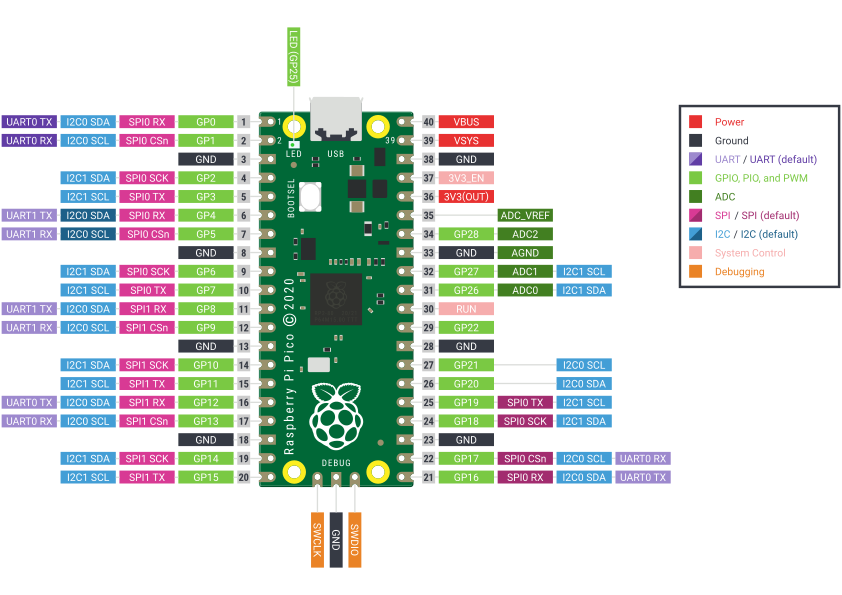
- 26 general purpose input/output (GPIO) pins
- 3 Analog Input (ADC) pins
- Digital I/O pins
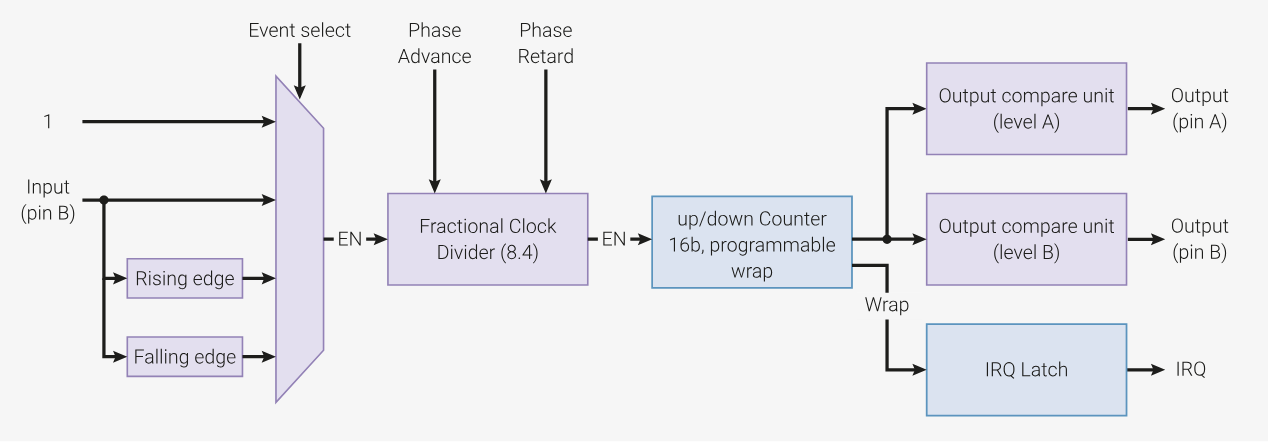
- Up to 16 PWM channels
- Programmable peripherals
- Can be powered via:
- Micro-USB port (5V input)
- 3.3V or 5V from an external power supply
Programming Workflow
- Will use MicroPython firmware on Pico to write and upload scripts
- Download Thonny IDE
- Install MicroPython on Pico via USB
- Use MicroPython language:
- PWM on Pico to control LED brightness
- Map distance detected by sensors to a corresponding PWM value
- Can also use C++ for better optimization and control over timing
- Use LED / PIR sensors for detecting movement
- Use ultrasonic sensors (HC-SR04) for detecting distance of the moving object or person
- Debugging through Thonny IDE:
- Print sensor values
- Adjust the PWM mappings based on real-world testing
Performance Considerations
- Responsiveness: Ensure sensor readings and PWM adjustments happen fast enough for smooth transitions of LED dimming.
- Use interrupts instead of polling for motion detection to improve responsiveness.
- Example: PIR sensor can trigger an interrupt to wake the Pico from low power state and adjust instantly.
- Power consumption: If power consumption is a concern, you can put Pico into sleep modes when no motion is detected.
- Multiple sensors and pin usage:
- Pico has enough GPIO pins to support multiple motion and proximity sensors, but you may need to plan pin assignments carefully.
- Using multiple sensors: Since I'm using a couple of sensors, I may use I2C or SPI sensors to reduce the number of GPIO pins required for analog inputs (I'll need to do more research).
Note: I do want to add a moving component to the final project, but because embedded programming is very new to me, I started focusing on one aspect of the project.
Simulation
Now on the Wowkzi simulator, I wanted to put my notes to use. I decided to use Python intead of C++ because I have very very limited knowledge of Python and thought it would be best to grow my skills further with it. I first read through the datasheet of the microcontroller, Rasberry Pi Pico to get myself familiarized with the board. I also read through the sensor datasheet I was thinking of using, Hc-SR04. With the help of openAI and my partner, we cobbled together code to have the LED react to the distance.

Code for reference below:
from machine import Pin, PWM, time_pulse_us
import time
# Set global variables
max_PWM = 65535
max_distance = 200
speed_of_sound = 29.1 # Speed of sound is ~343 m/s or 29.1 µs per cm
# LED on GPIO 15
led = PWM(Pin(15))
led.freq(1000)
# Ultrasonic sensor setup (HC-SR04)
trig = Pin(28, Pin.OUT)
echo = Pin(27, Pin.IN)
def get_distance():
# Send a 10µs pulse to TRIG pin
trig.low()
time.sleep_us(2)
trig.high()
time.sleep_us(10)
trig.low()
# Measure the time for the echo to return
duration = time_pulse_us(echo, 1, 1000000) # Wait for the echo pin to go high (max 1 second)
# Convert duration to distance (in cm)
distance = (duration / 2) / speed_of_sound
return distance
while True:
distance = get_distance()
brightness = int((max_distance-distance) / max_distance * max_PWM)
brightness = min(max_PWM, max(0, brightness)) # Ensure it stays within bounds
led.duty_u16(brightness)
time.sleep(0.1)
click here to download the simulation file to test for yourself!