Week 09 — Output Devices
Powering a Servo
This week, we are attempting an output device. In my final project, I will be using a pulley belt via a servo so I wanted to test and control a servo.
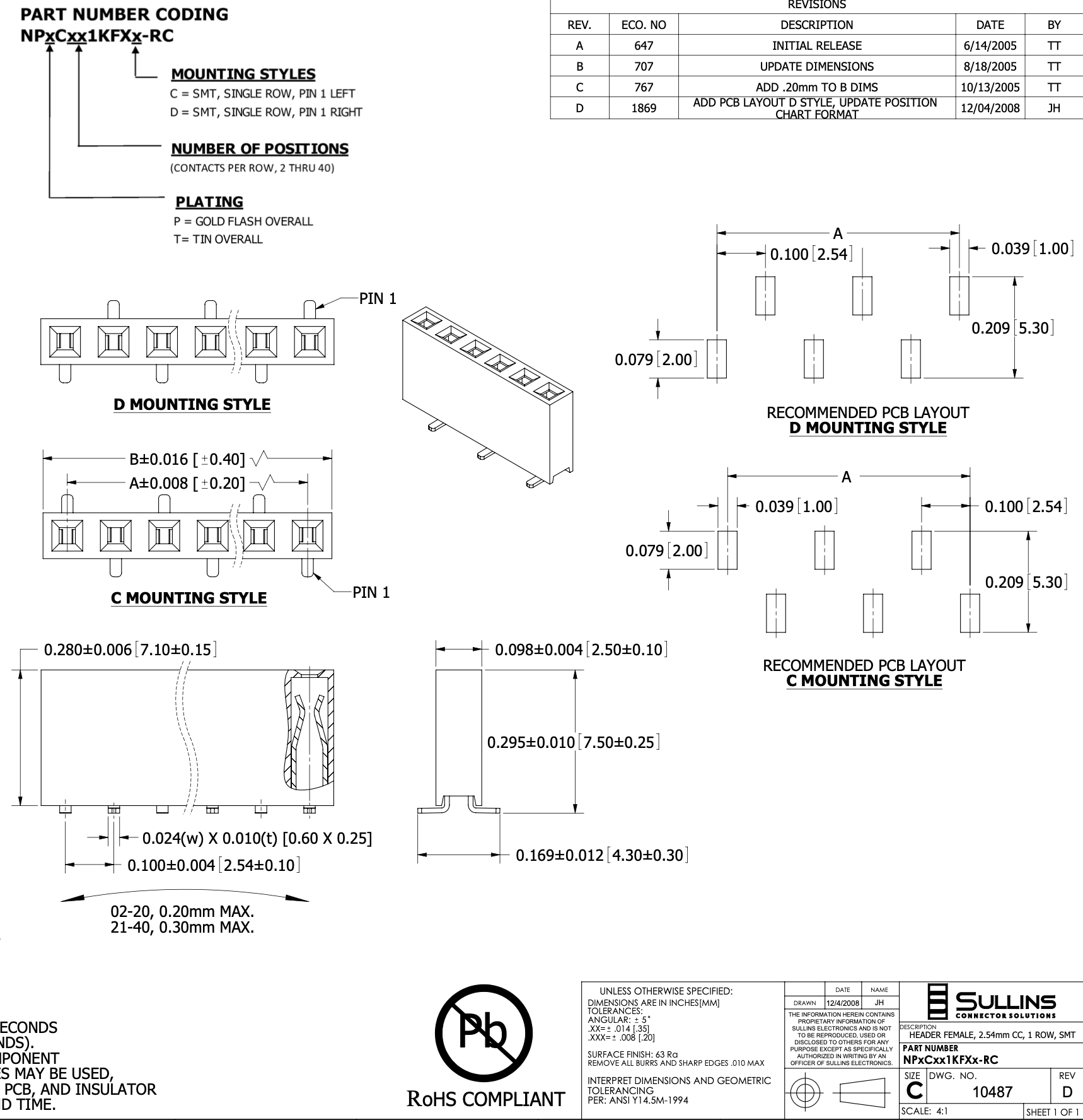
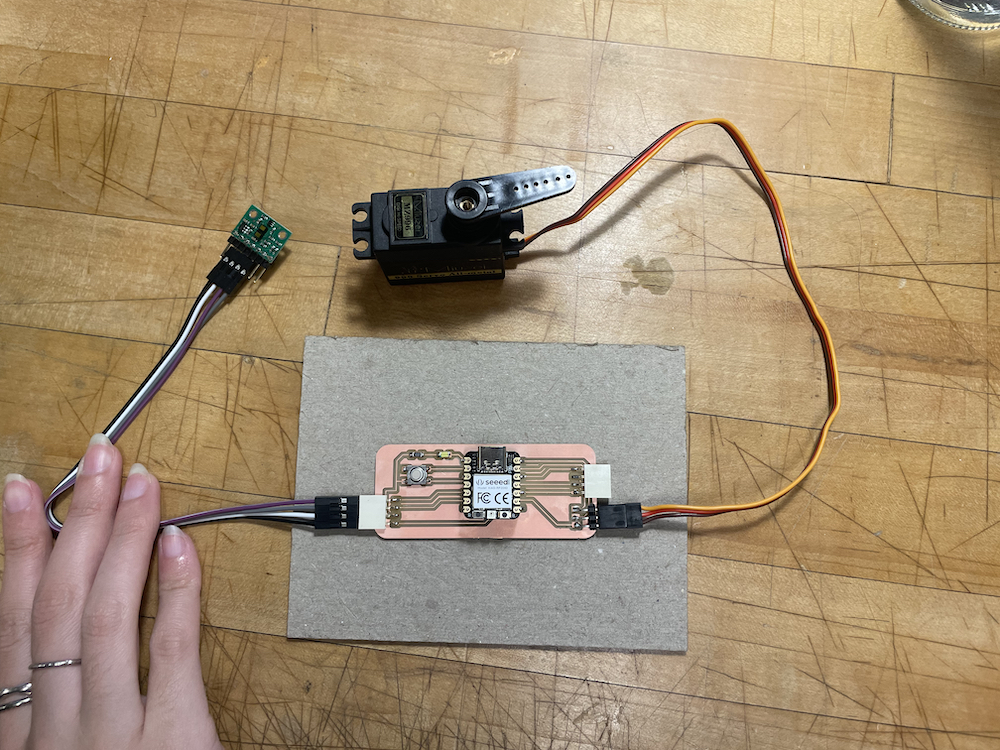
I wanted to try using connectors throughout my board in the off chance I fried anything (which, spoilers, I did...) and start working with wiring for the final project.
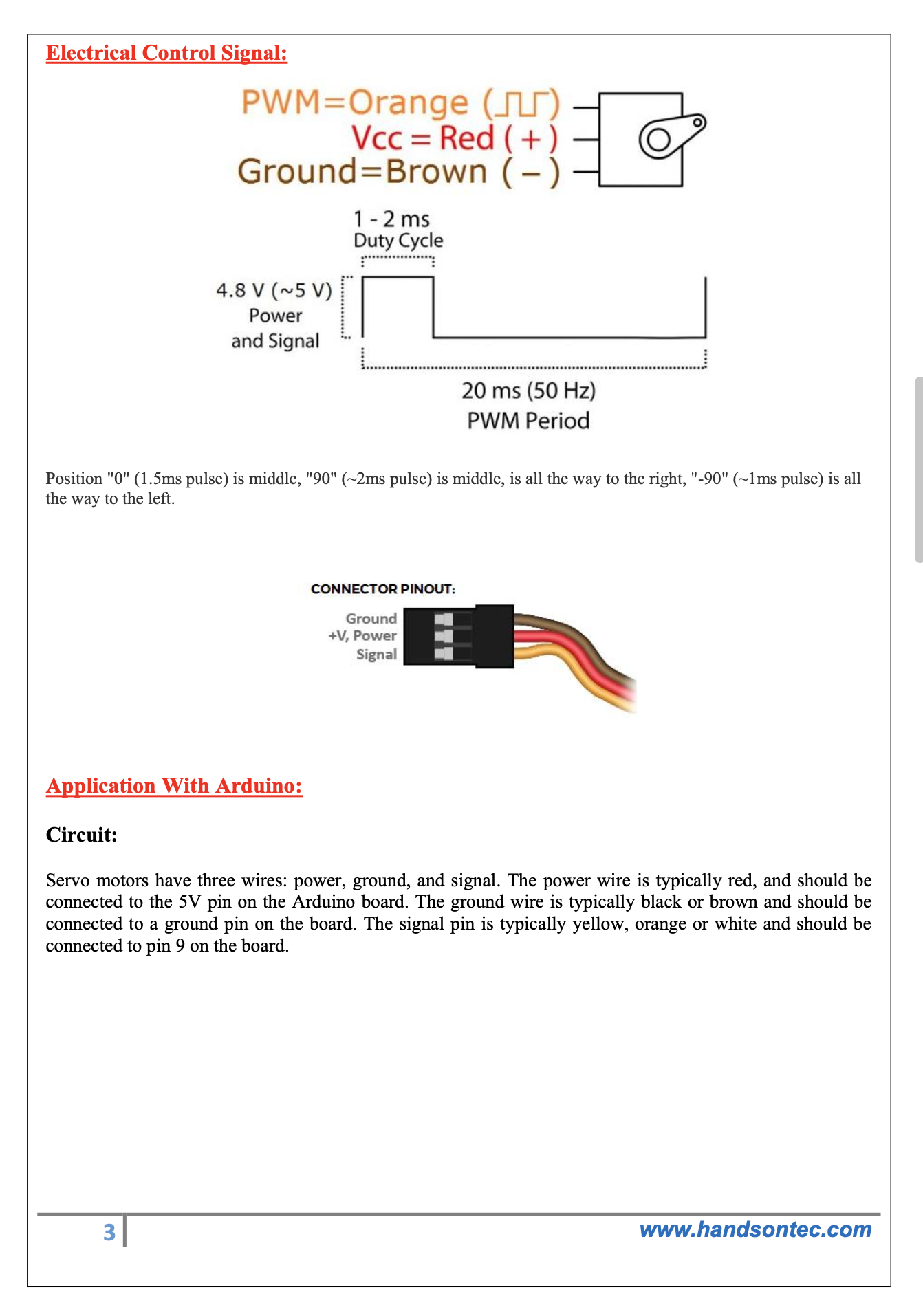
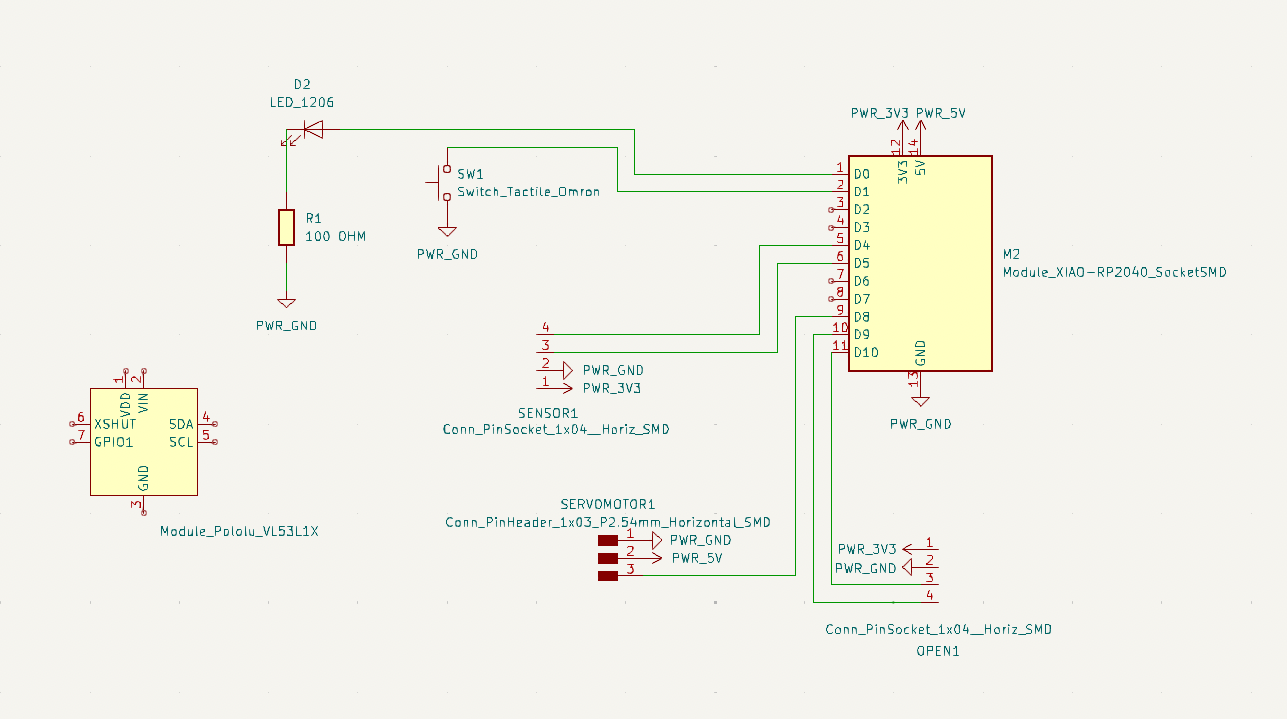
I also used this board as a draft for my final project PCB board. See below for the servo datasheet.

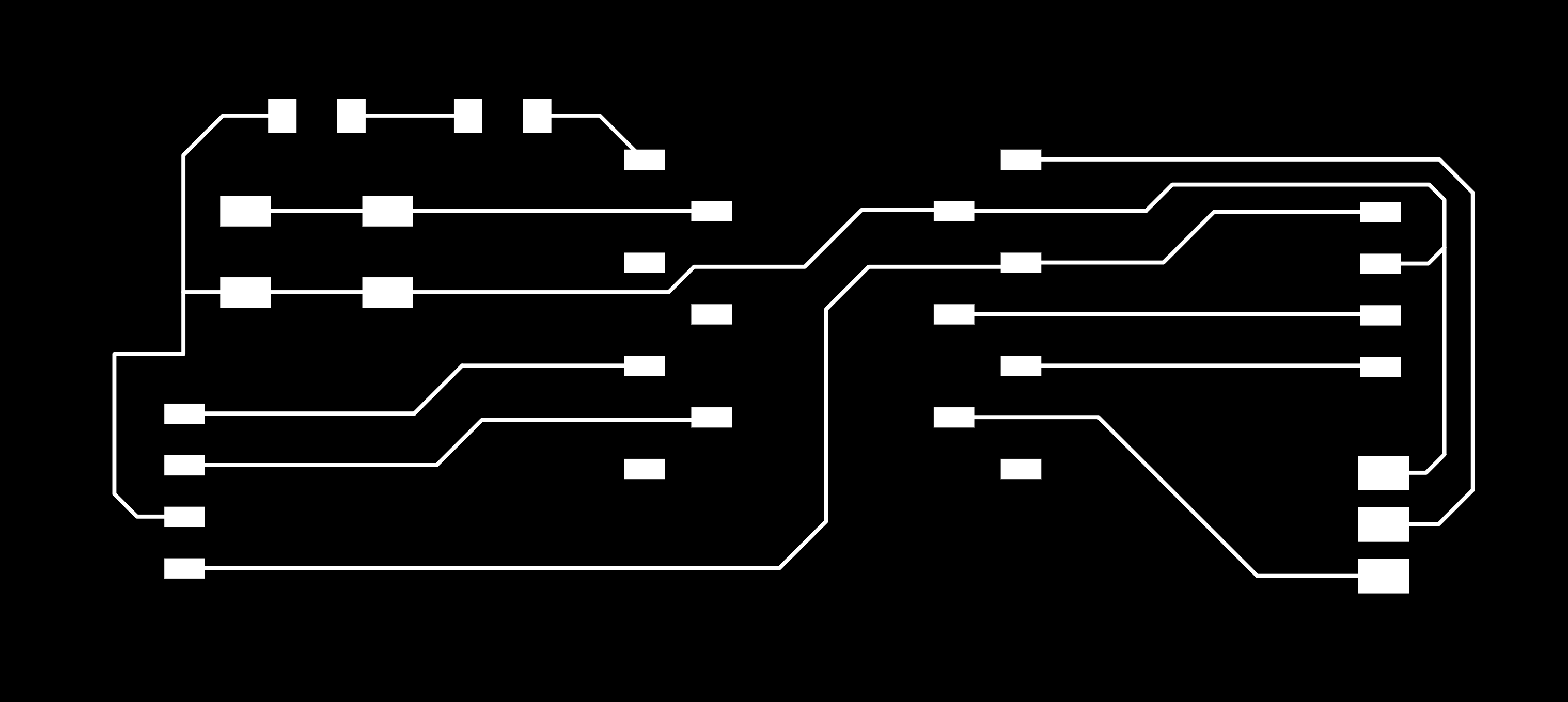
I've noticed that using Kicad schematics feels easier everytime. The pathing for the board was bit challenging but I managed to get something usable!
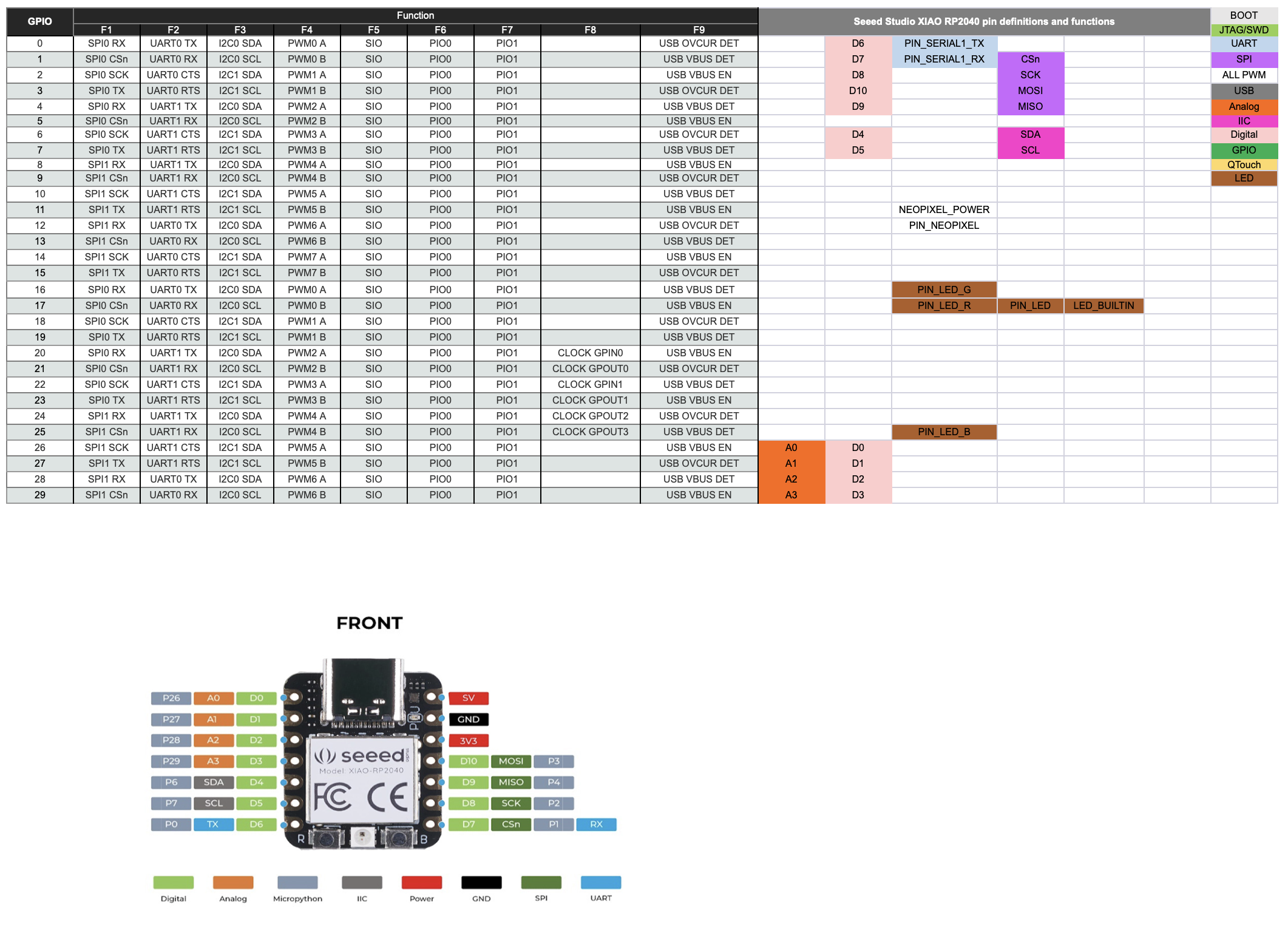
I still always pull up the SeedXiao RP2040 pinout for reference.

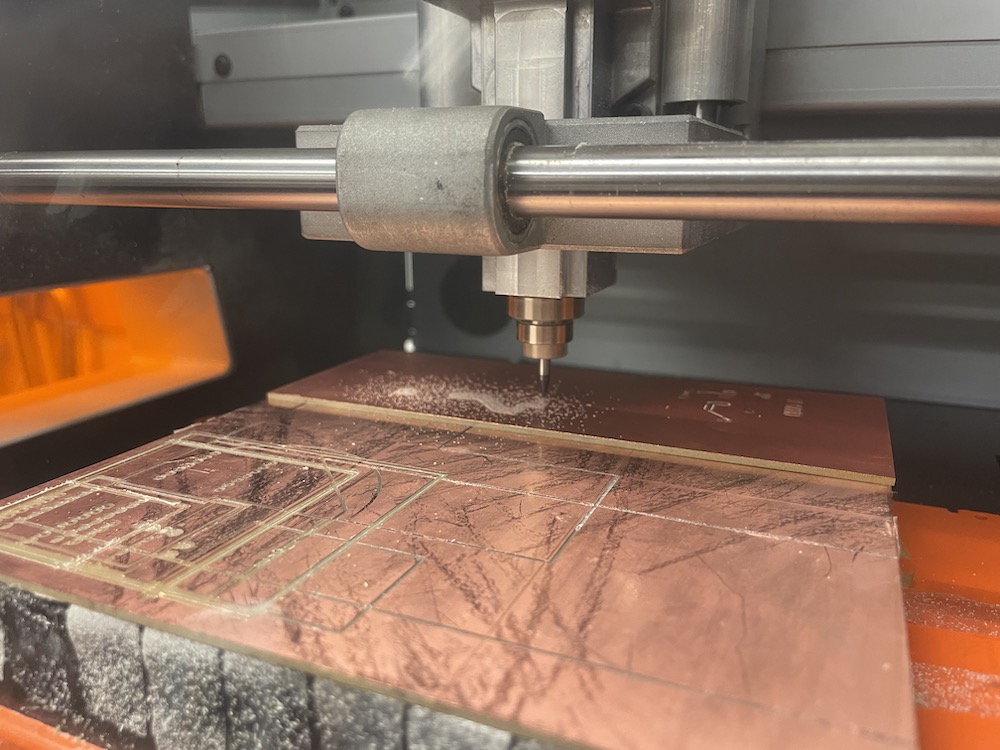
Milling & Soldering the Board
This part is straight forward now. The soldering was a bit more time consuming but overall not challenging anymore.
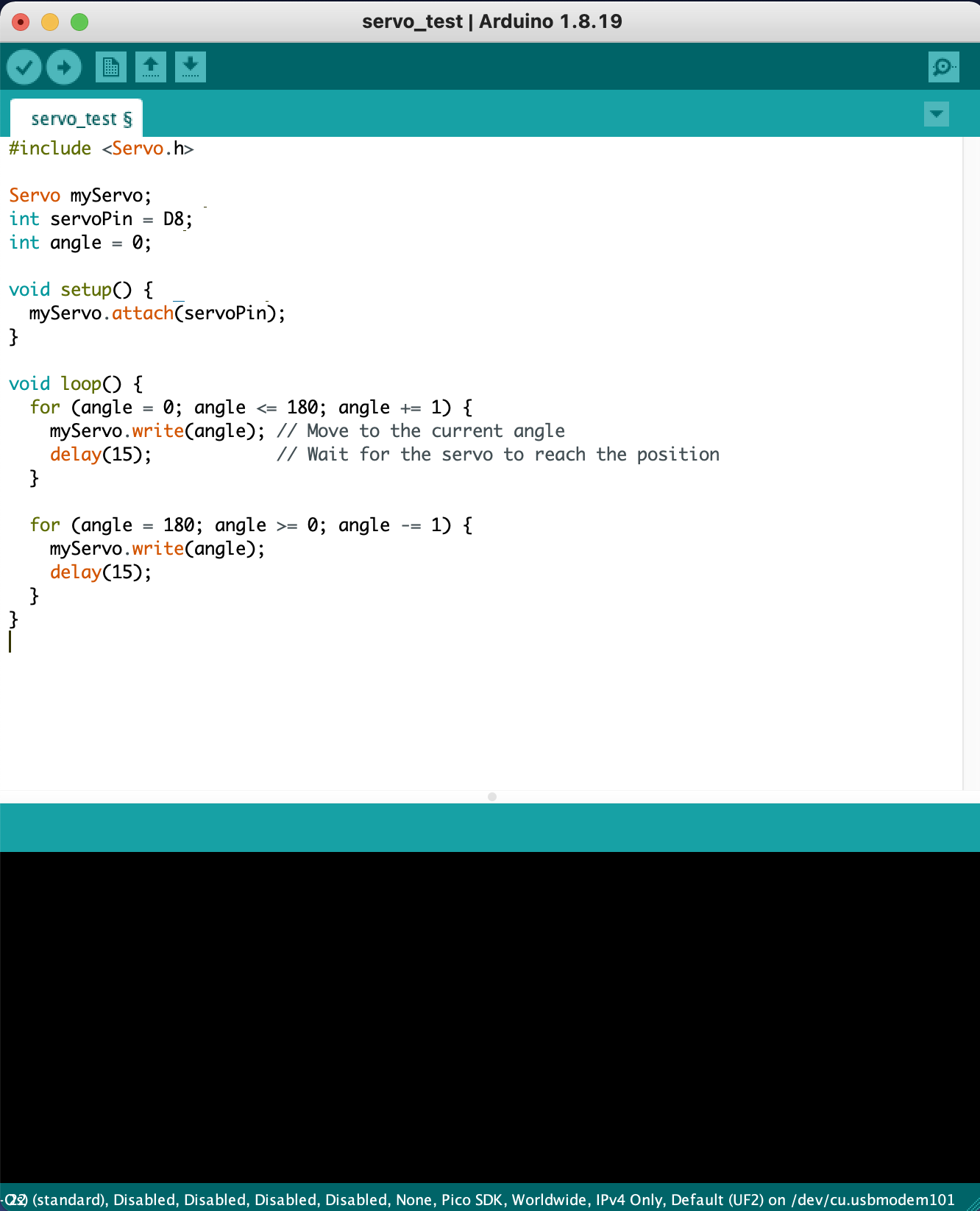
Coding & Debugging the Board
I am continuing to use Arduino as it'll be easier to chat with TA Anthony when something goes wrong. I confirmed that the library had Servo installed onto the board.
I first tested all my components to make sure everything on the board was properly soldered.
The next step was the servo movement. I ran a test code to see if I can get it to move at all. This was my flaw... I knew that the servo would eventually need a separate battery source for it's final intended purpose,
but I thought I could have it move very basic movements. The answer was ... I couldn't have it move more then once without my microcontroller crashing...
I think after 3 or 4 times of rebooting and running different code, I ended up frying my microcontroller... Good thing I made it so it's easily swapped out.
I'll need to use a battery/external power for the final project and further code testing next time...
Group Assignment
Our TA Diana went over measuring power consumption of an output device (thanks Alex for volunteering yours!) and last week's assignment:
probing an input device's analog levels and digital signals.