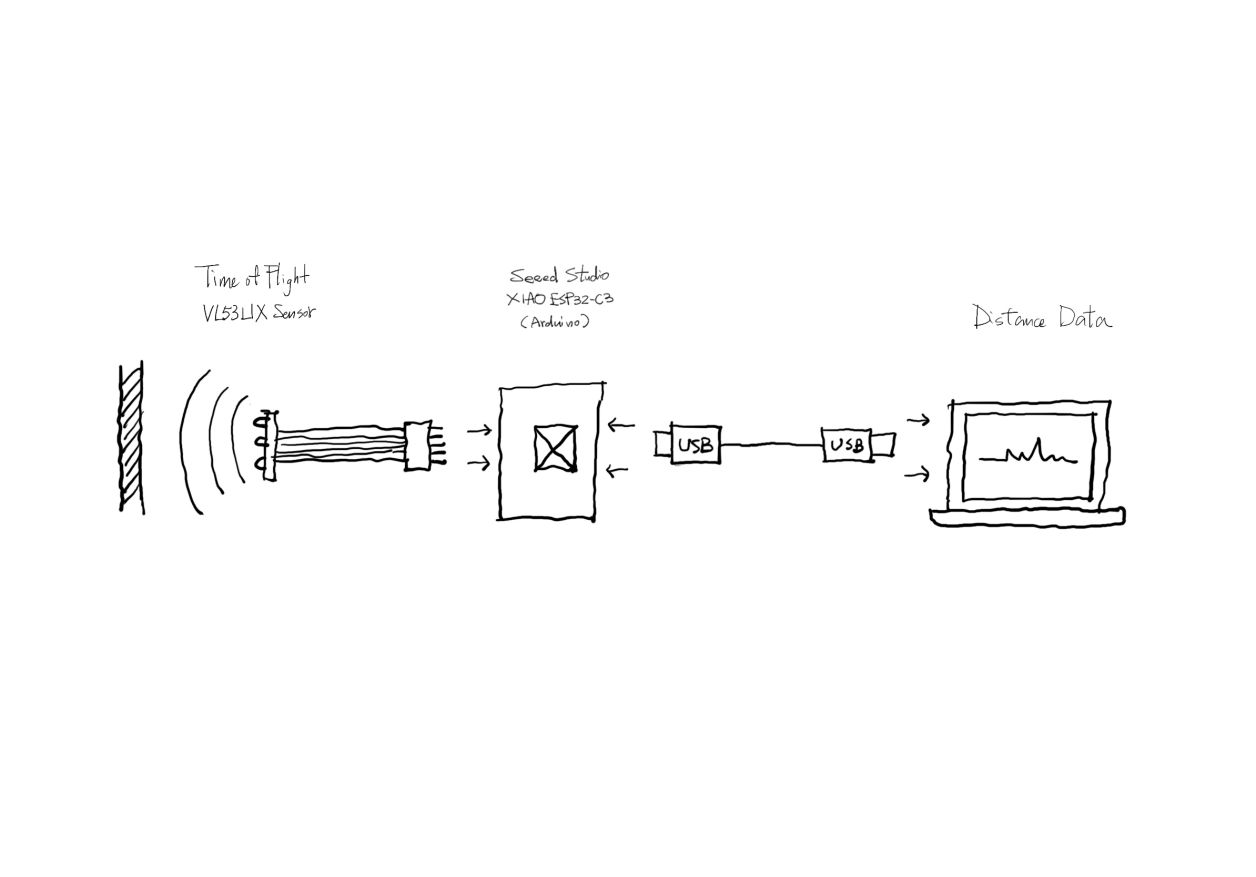
To do my final project, being able to sense the objects going through my machine and react based on the facts is my goal. In order to do that, I am testing this version of the distance sensor.
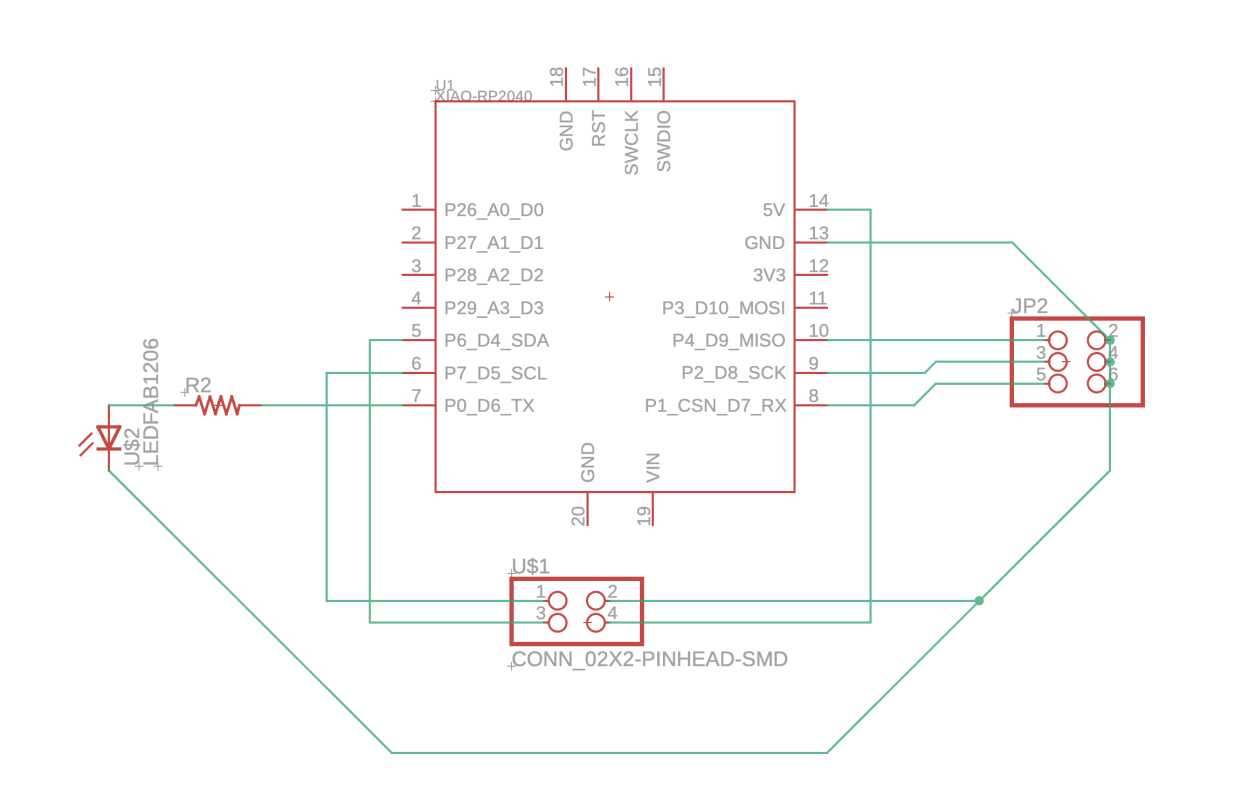
I am using Fusion to do my schematic design. Using Seeed Studio XIAO ESP32C3 as the core and adding a 4-pin head for the Time-of-Flight sensor, an LED to make output in the future, and an additional 6-pin head for ground and potential debugging.
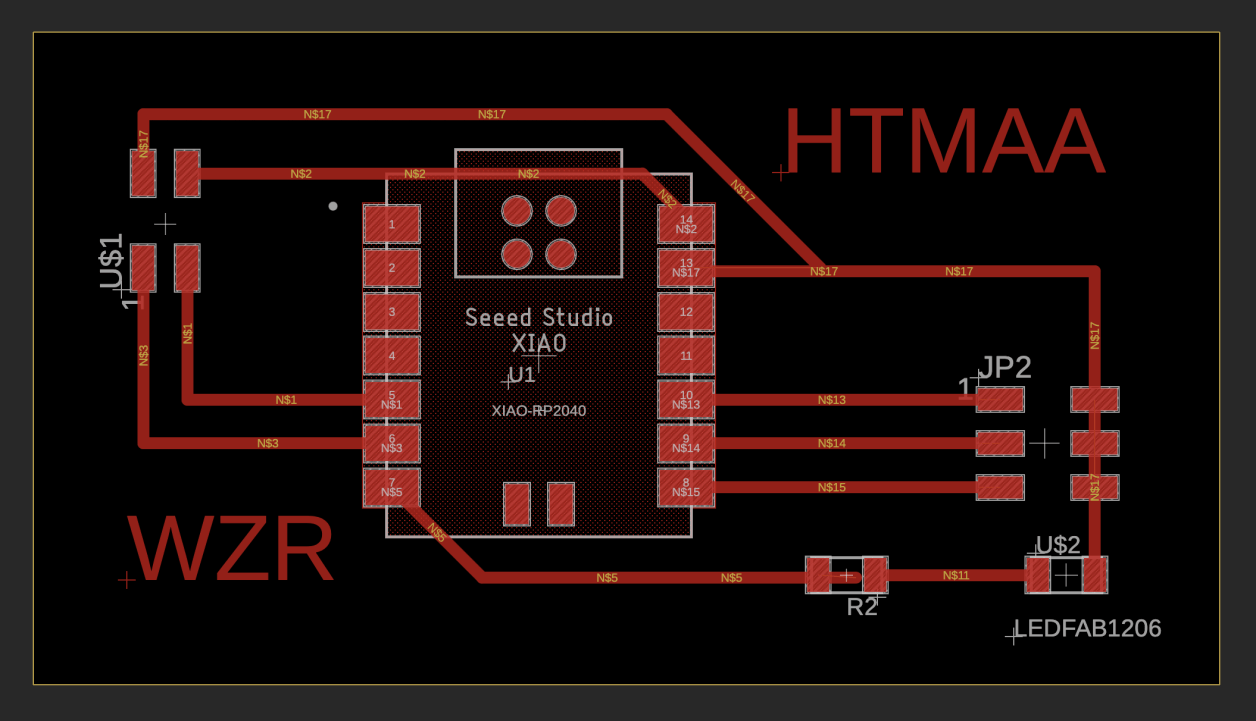
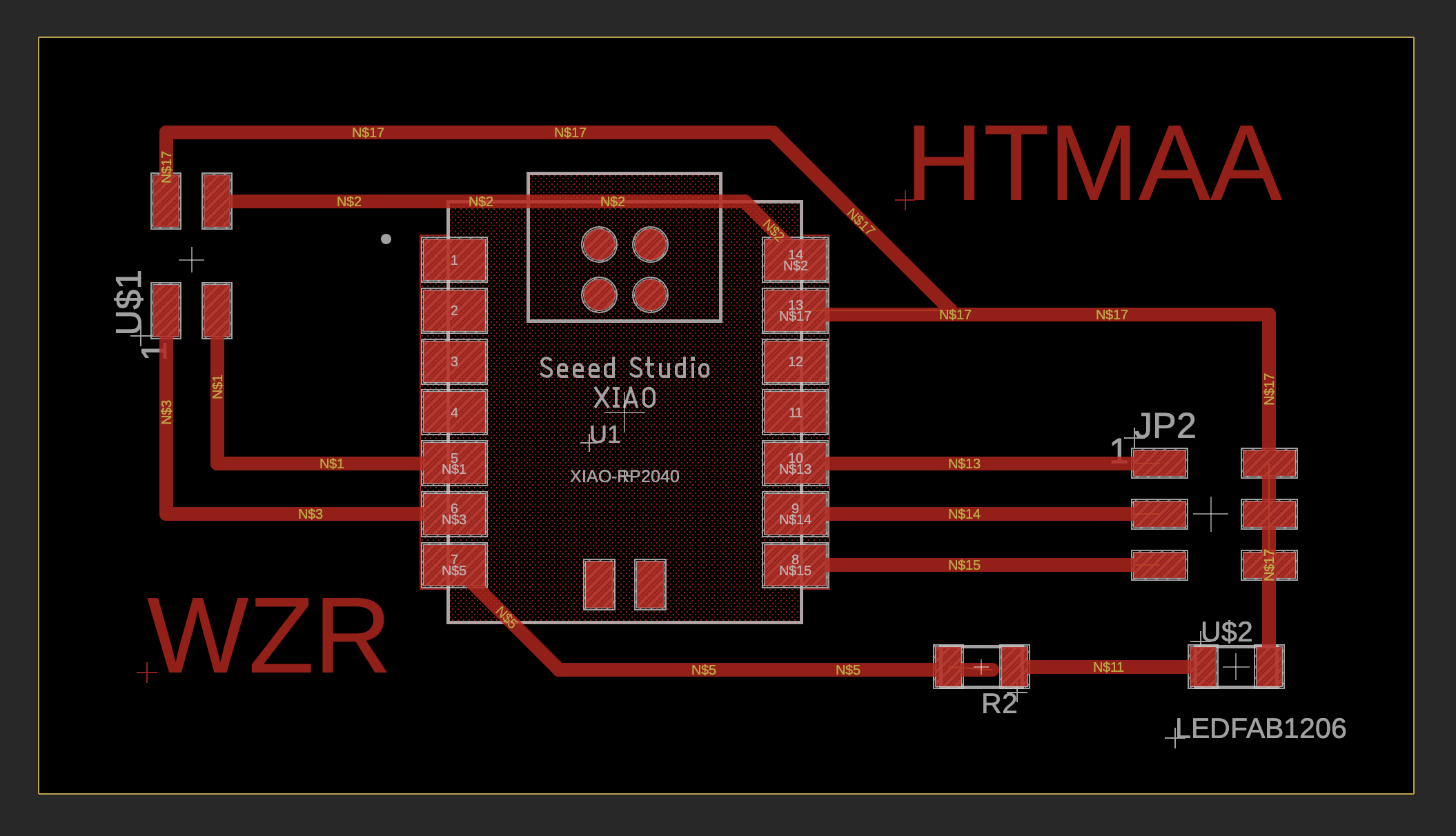
I use pretty thick routes (25mil) as the default to improve transit and leave some extra spaces between different components. WZR & HTMAA letter is a must!
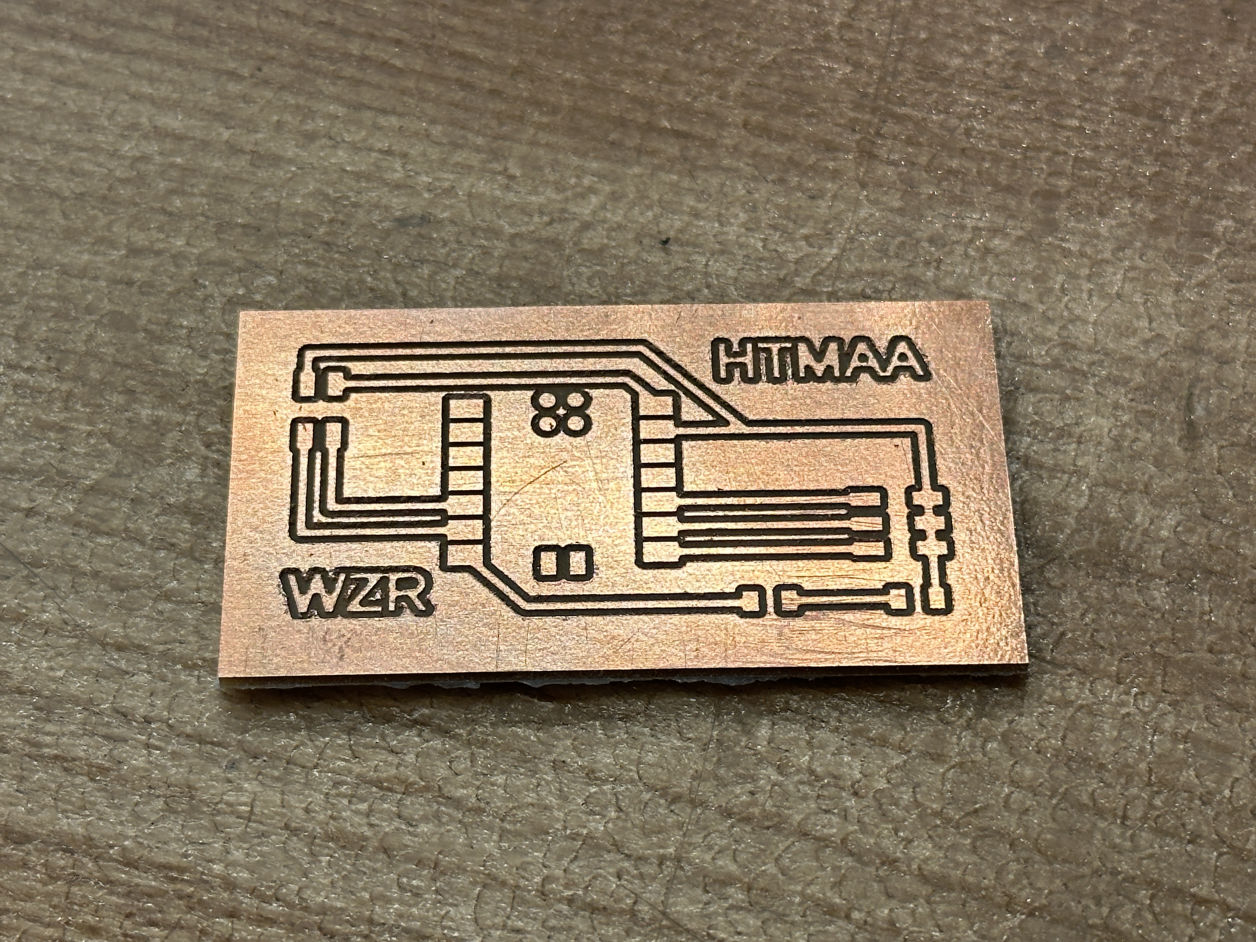
The board was done in 10 min with the milling machine.
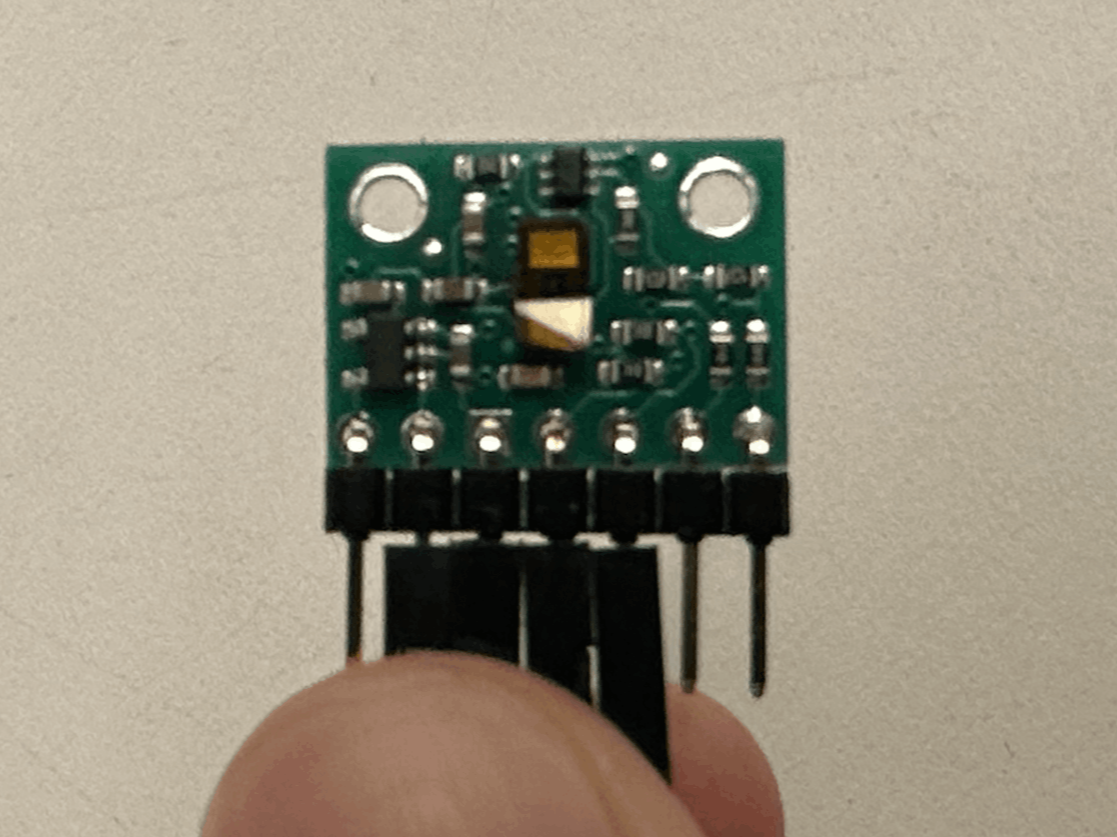
I chose the VL53L1X module for distance sensing. For this exercise, I am only using four of its pins to make connections.
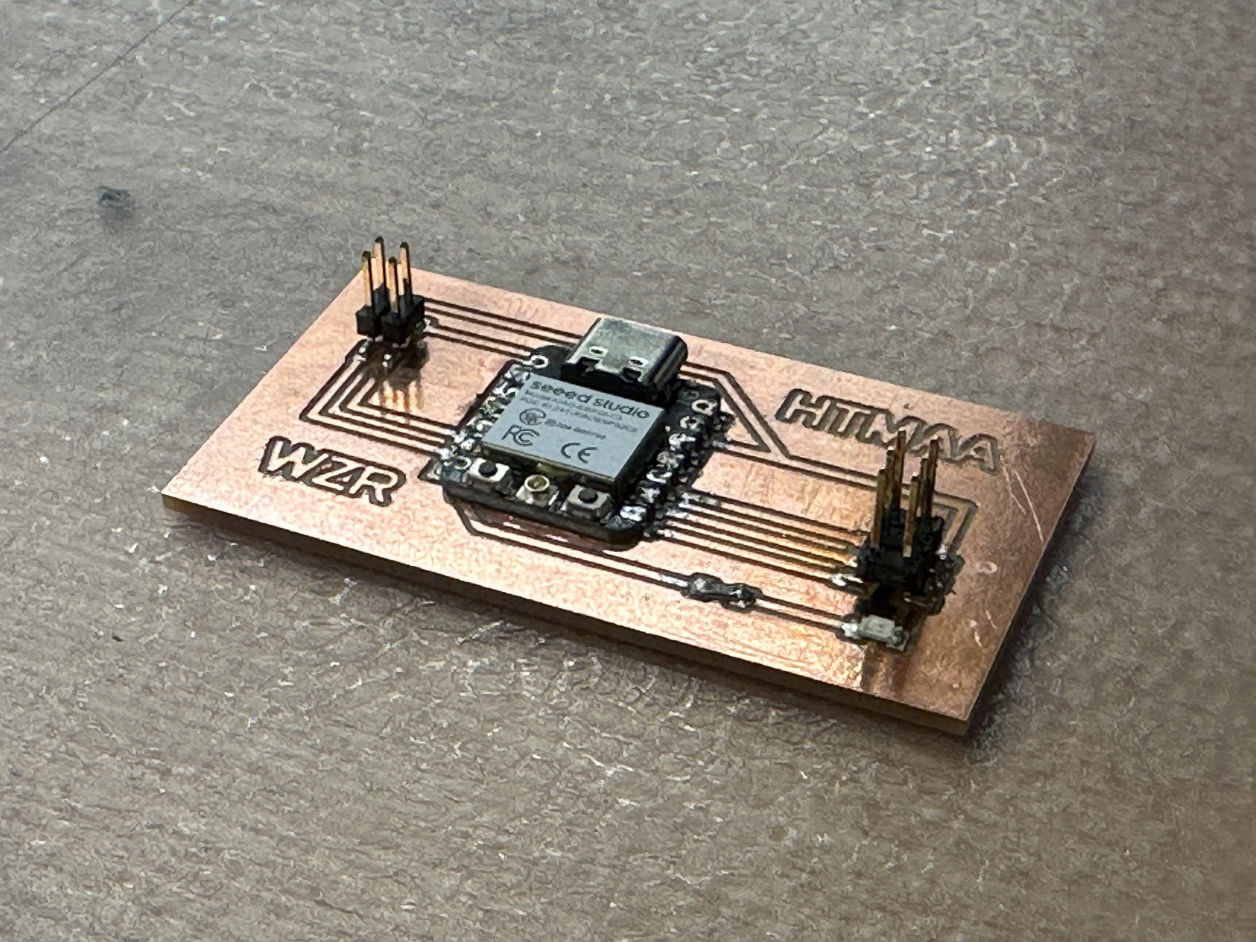
Simply soldered all the parts from the board design.
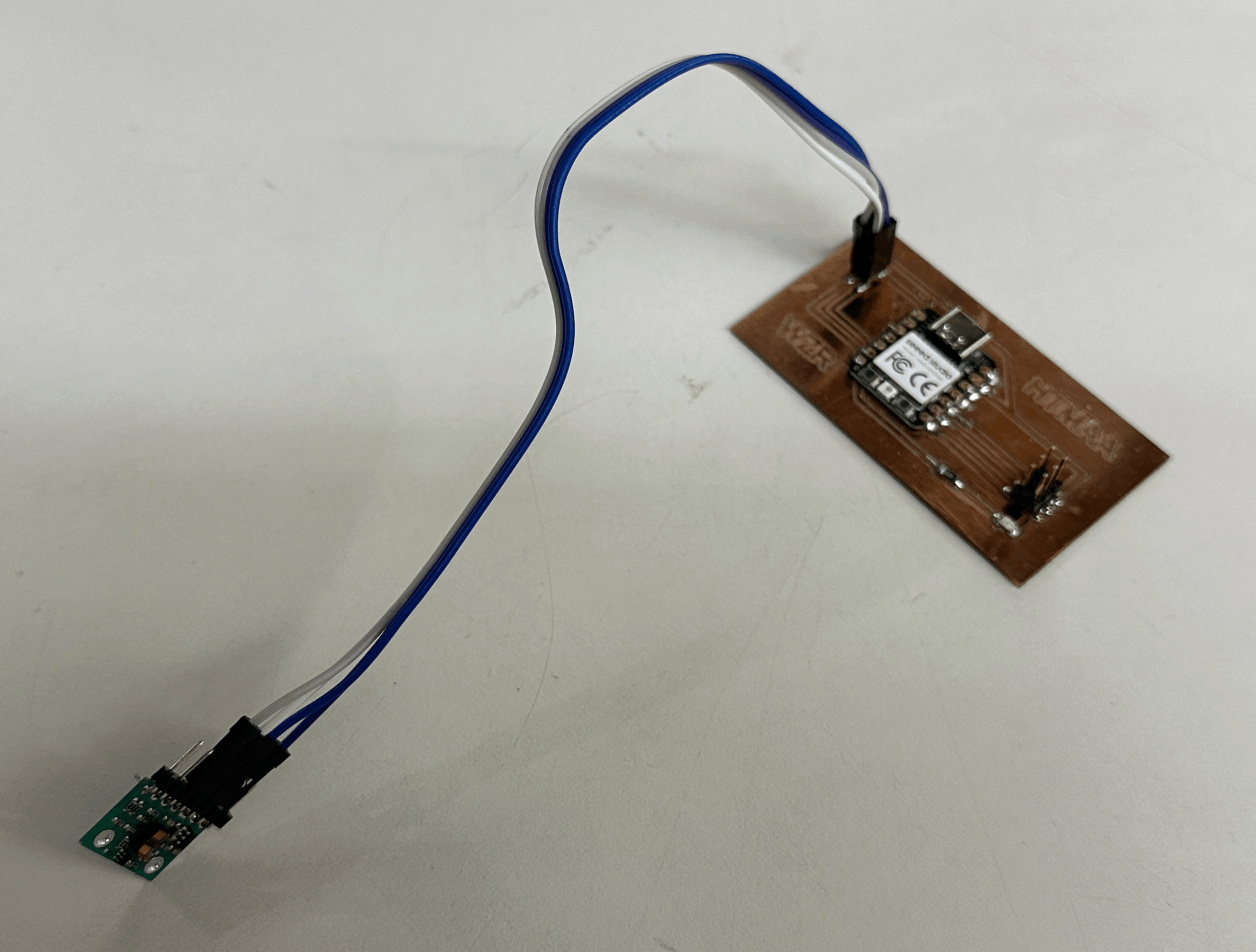
Everything is connected and should be ready to go!
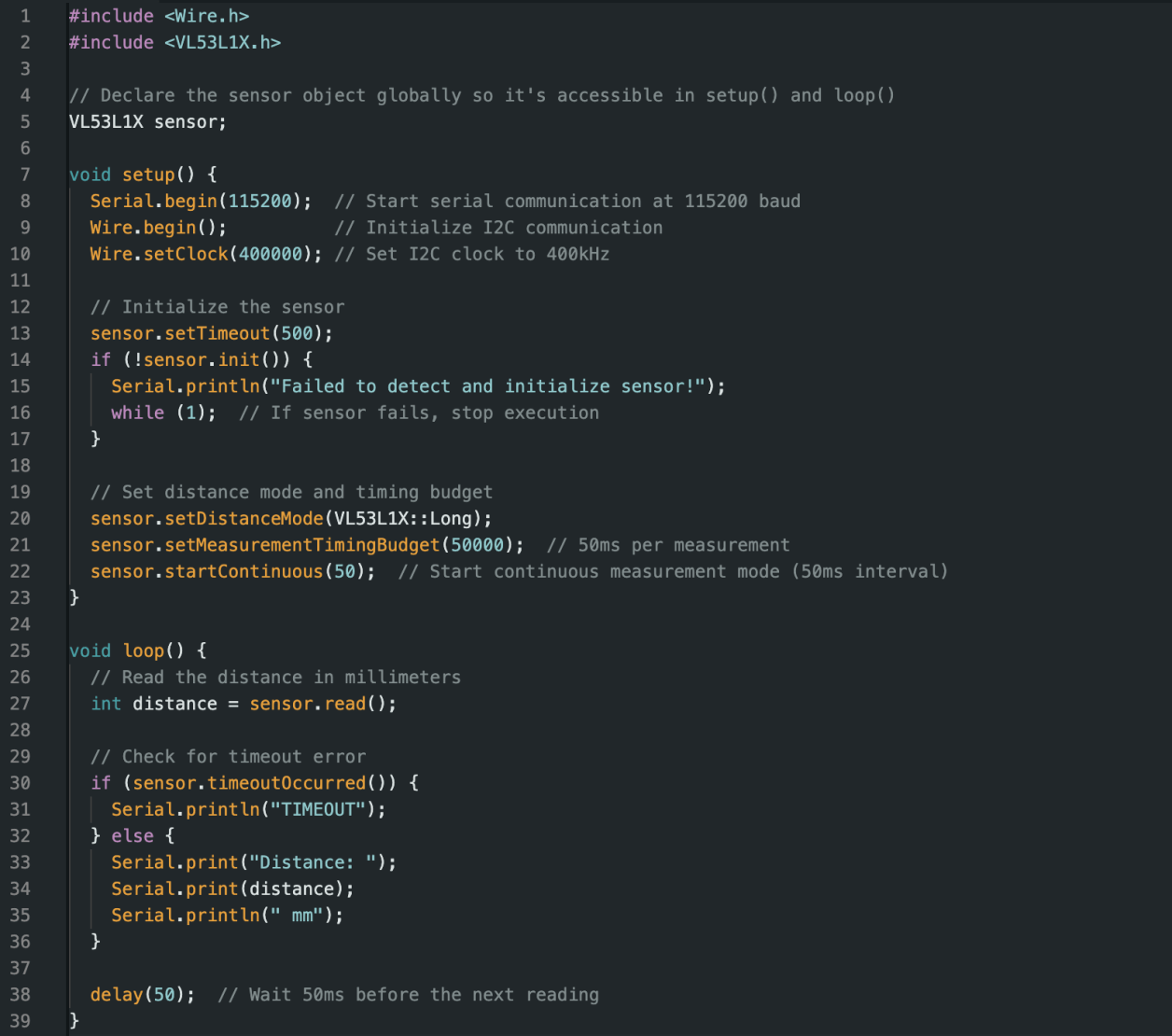
Connected the devices to my Mac, and started the program to get the visualization from the input data.
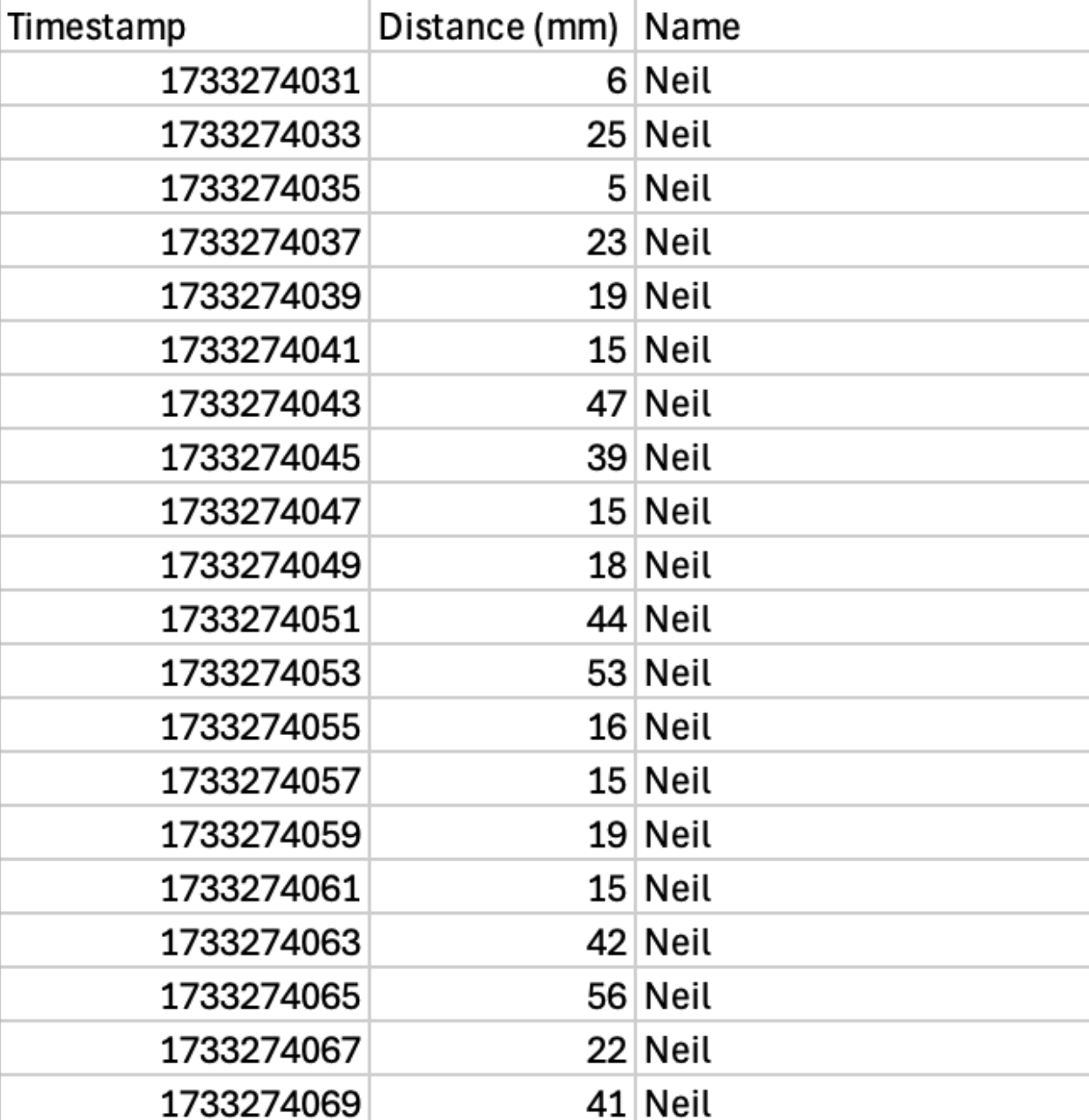
After gathering all the data, I moved forward on week 14 to test out some fun codes to visualize it!
Please go to Week 14 for more details!!

Offline Website Maker