-

- Computer-Aided Design 01
- Parametric Construction 02
- Electronics Production 03
- 3D Printing 04
- Electronics Design 05
- Computer-Controlled Machining 06
- Embedding Programming 07
- Molding + Casting 08
- Output Devices 09
- Machine Design 10
- Input Devices 11
- Interface + App Programming 12
- Networking + Communications 13
- Composites 14
- Final Project 15
HOW TO MAKE (ALMOST) ANYTHING
Lily Gabaree
Output Devices
I was initially hoping to make a walking house this week, as I already have these house sculptures from a show, and I thought it would be interesting if they moved in their next iteration.

I still want to do this, but figuring out the mechanics of making them walk - possibly with servo motors hitting the legs, internally? - would need a little more time (maybe something Theo Jansen style instead?). So I decided to try to make a house tank instead, that would wheel around. I think it would be interesting if a bunch of tiny houses followed you around in a space, kind of like Karl Lorenz and his imprinted ducklings.
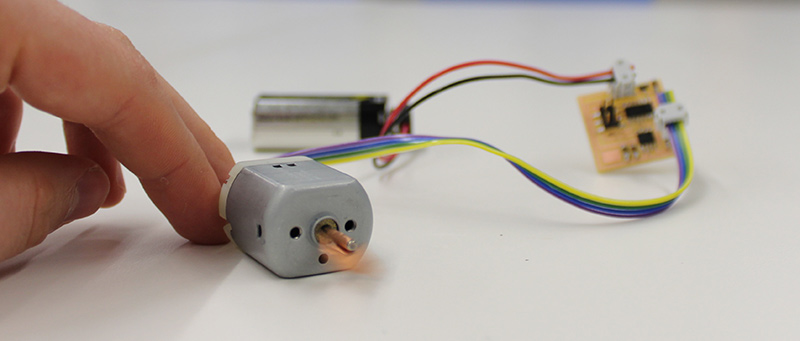
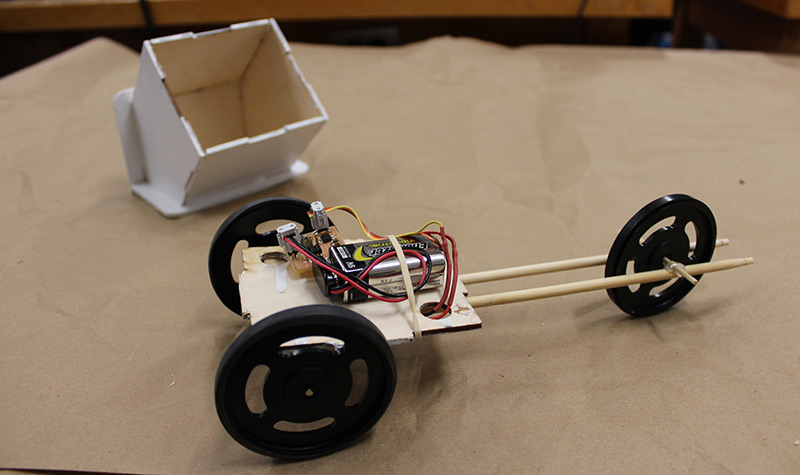
I decided to try working with DC motors to propel my house. First I replicated Neil's DC motor process; this went pretty smoothly. The board works, and I was able to program the Attiny44 with my programmer from week 4. I connected a DC motor with ISP cable to the 2x2 pin header, and connected the other header to a 9V battery.
I changed Neil's code so that the motor would more in one direction the whole time, rather than alternating direction. Then I wanted to make the board drive two motors, since if I try to propel a house with just one, it will turn in circles. Rob suggested these smaller DC motors, since they aren't as fast as the first one, and might create a more realistic movement for the house. I wanted to connect both to the 2x2 header; I couldn't get them to work when I squashed them all in the header connector, possibly because the wires that were already sautered to the motors were a bit thicker. So I made a new cable to connect them. I sautered the new cable to the existing motor wires, and used heat shrink to smooth the connection.
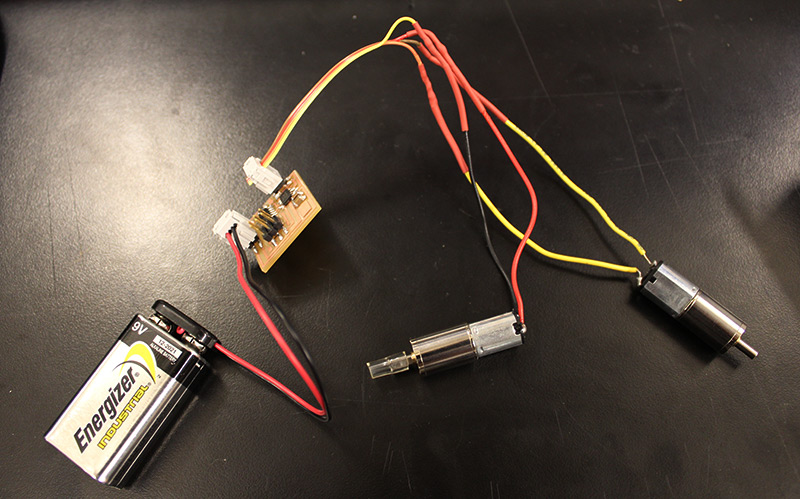
The connection was iffy, so I reflowed the sauter on the motor-wire connections and on the header pin. Finally I got the two motors turning.
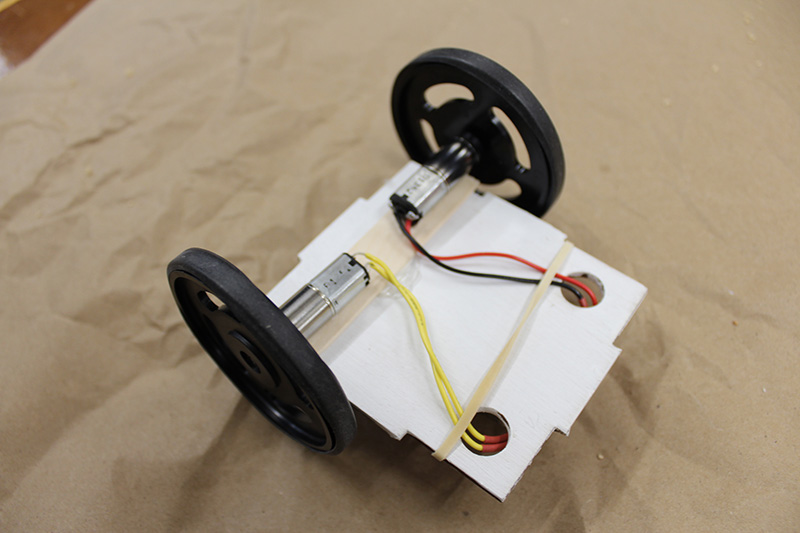
Then I needed to figure out how these two motors would make my house move. I started scavenging around the shop for materials. Daniel found me three plastic wheels and some black rubber bands (for tread). I then assembled an extremely structurally unsound house-on-wheels, courtesy of rubber bands and hot glue. Since I didn't have enough wheels to make it a tank, I used the third wheel as a free-moving support in the back, which looks a lot like a training wheel, which I guess is appropriate if it is the duckling equivalent of a moving house.
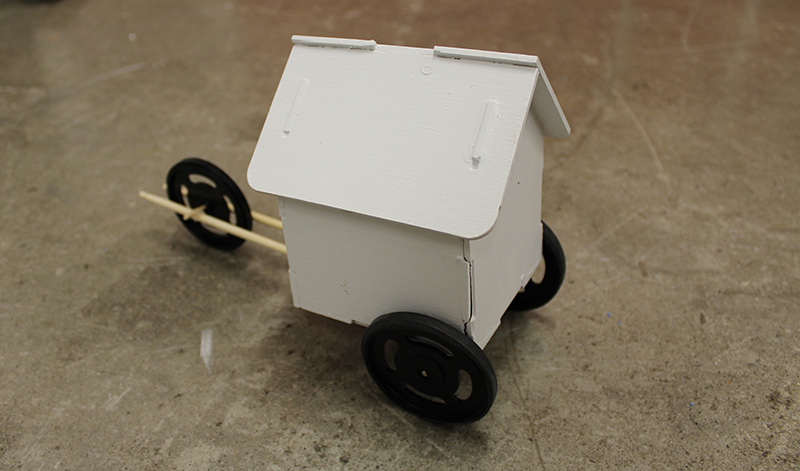
The house was extra challenging to make, because I was trying to fit its electrical components inside the house, but there's no way then externally to turn it on and off; so the wheels were on, and turning very aggresssively, as I attempted to fit the whole thing together. And then I realized that the motors were going in opposite directions, so it was going nowhere.
I switched the leads on one of the motors, and finally got it - very briefly - going (though the training wheel was mostly static). Here it is, running away from me.