Final Project Update: Part 2
IR communication on the joystick controller
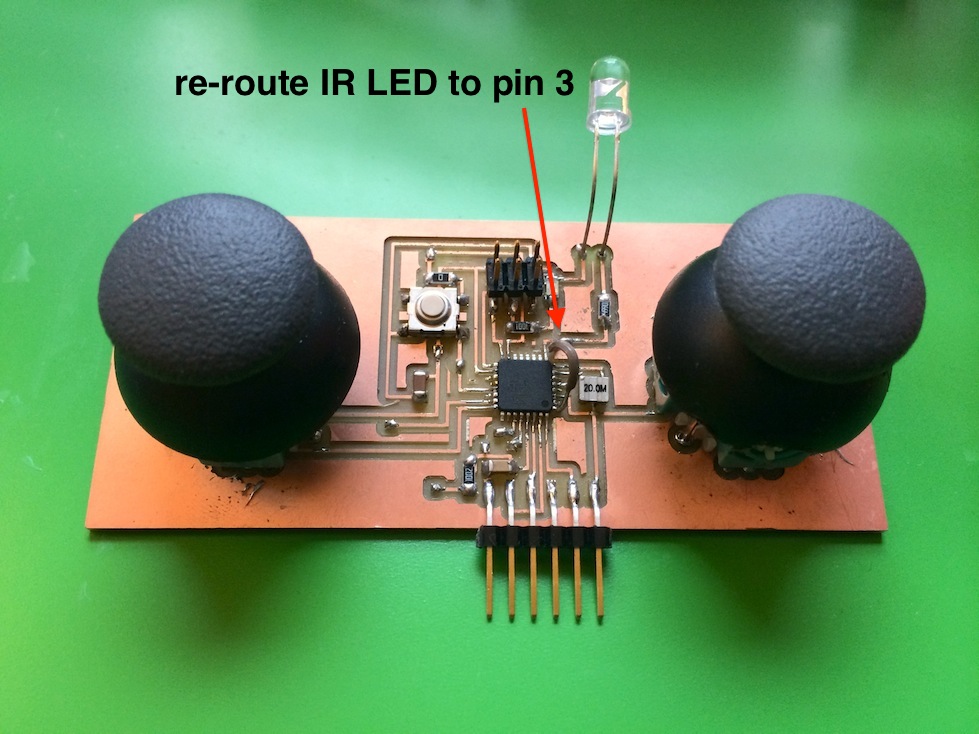
Using example codes Arduino library called IR Remote, I programmed the joystick controller board to have the IR LED send out IR signals. I used an Arduino Uno to test communication with an IR receiver. First I had the problem that I had the IR LED connected to the wrong pin. IR signal sending only works with digital pin 3, so I severed the connection by scraping away at the trace with a knife and then soldered a wire between the IR LED and digital pin 3.
The joystick controller board was able to send signal and the Arduino receiver board was able to receive the signal. However, I did notice a potential troublesome issue. The LED has to be pointed at the receiver at just the right angle for the signal to be received. This means I might have to chase my blimp around to communicate with the motor boards. I also tried sending signal with a regular TV remote, and that seemed to work well. The TV remote can be pointed almost anywhere and even held behind my back and the receiver was able to get the signal. As a failsafe, I plan to program the motor board to receive and respond to signals from a TV remote.
3D printed propellers
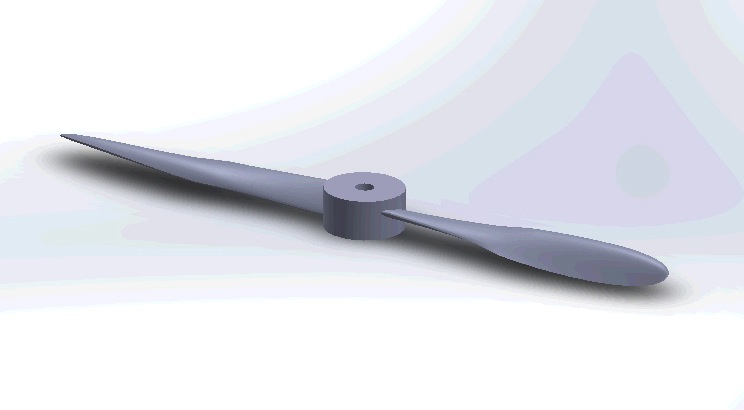
I designed tiny propellers to go with my tiny motors. I roughly followed this youtube tutorial on how to draw a propeller in SolidWorks. Upon consulting my friend who knows a lot about propeller design, I made the profile of the propeller have an airfoil shape with a round leading edge and a sharp trailing edge. The propellers were 3D printed using an Objet

DC motor PCB
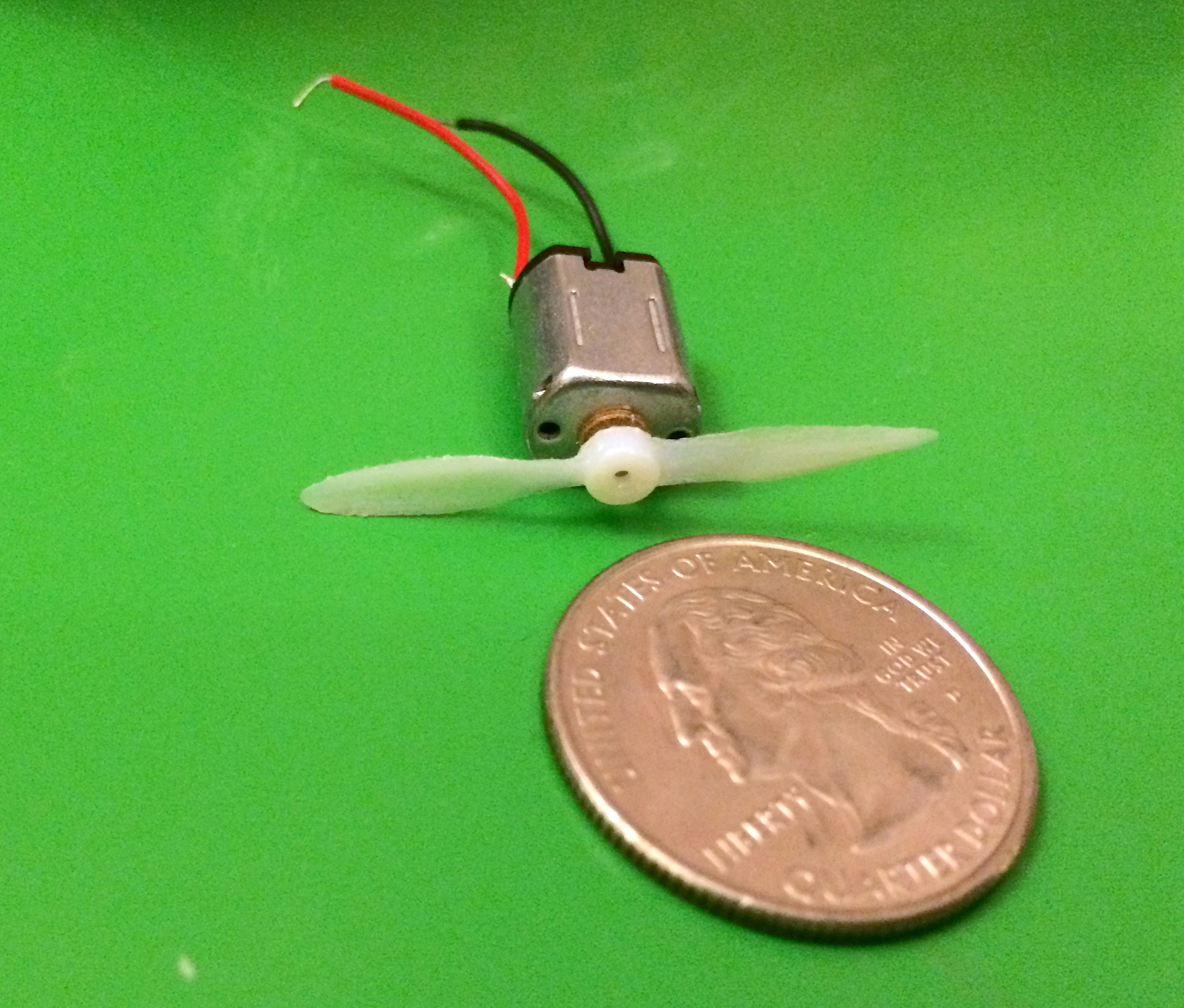
I made a two-sided PCB to control the DC motors. I will be using three motors with propellers attached. Two will be facing forward and will be placed side by side. These will control turning and going forwards and backwards. One will be facing down and will control up and down motion.
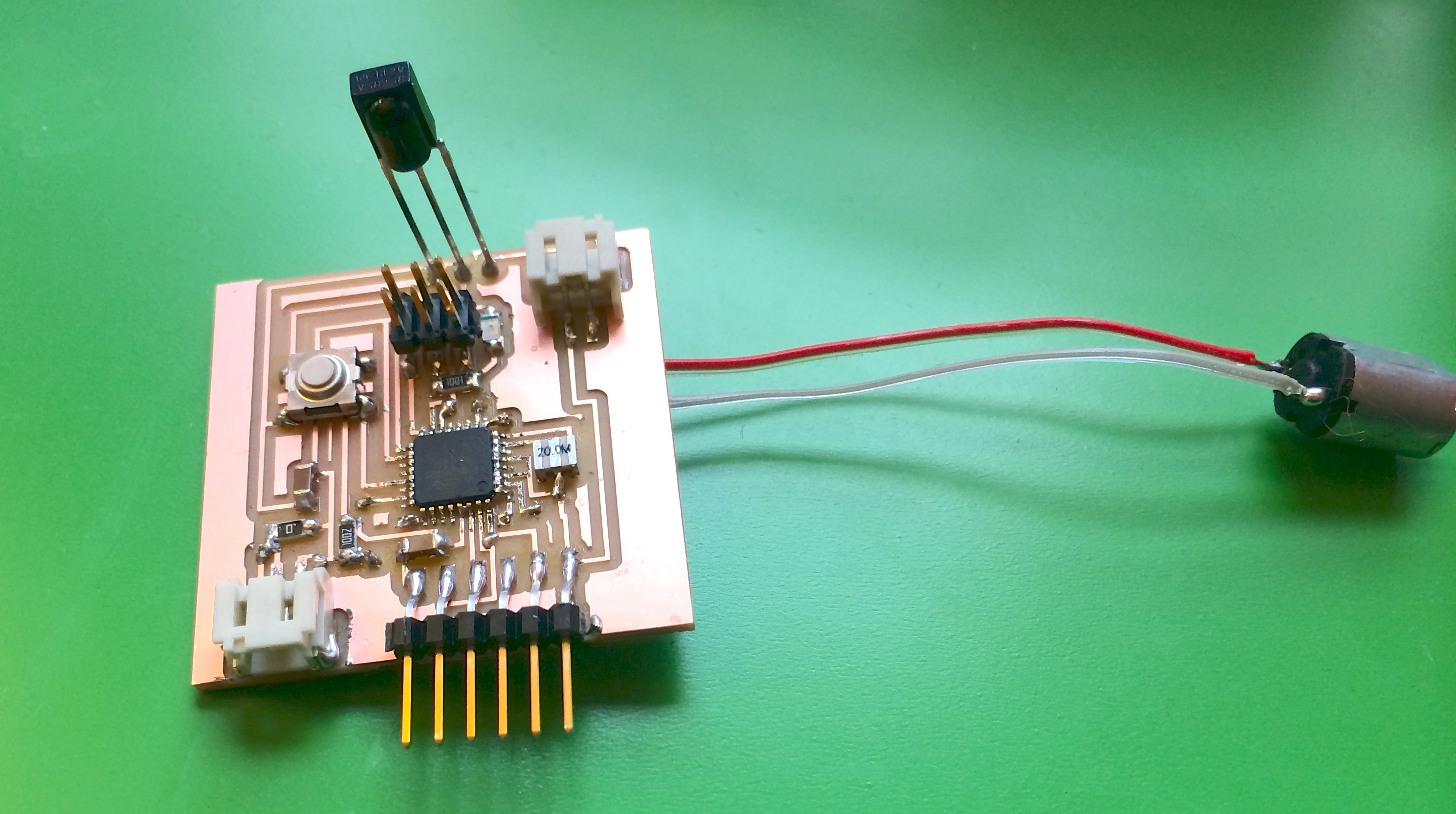
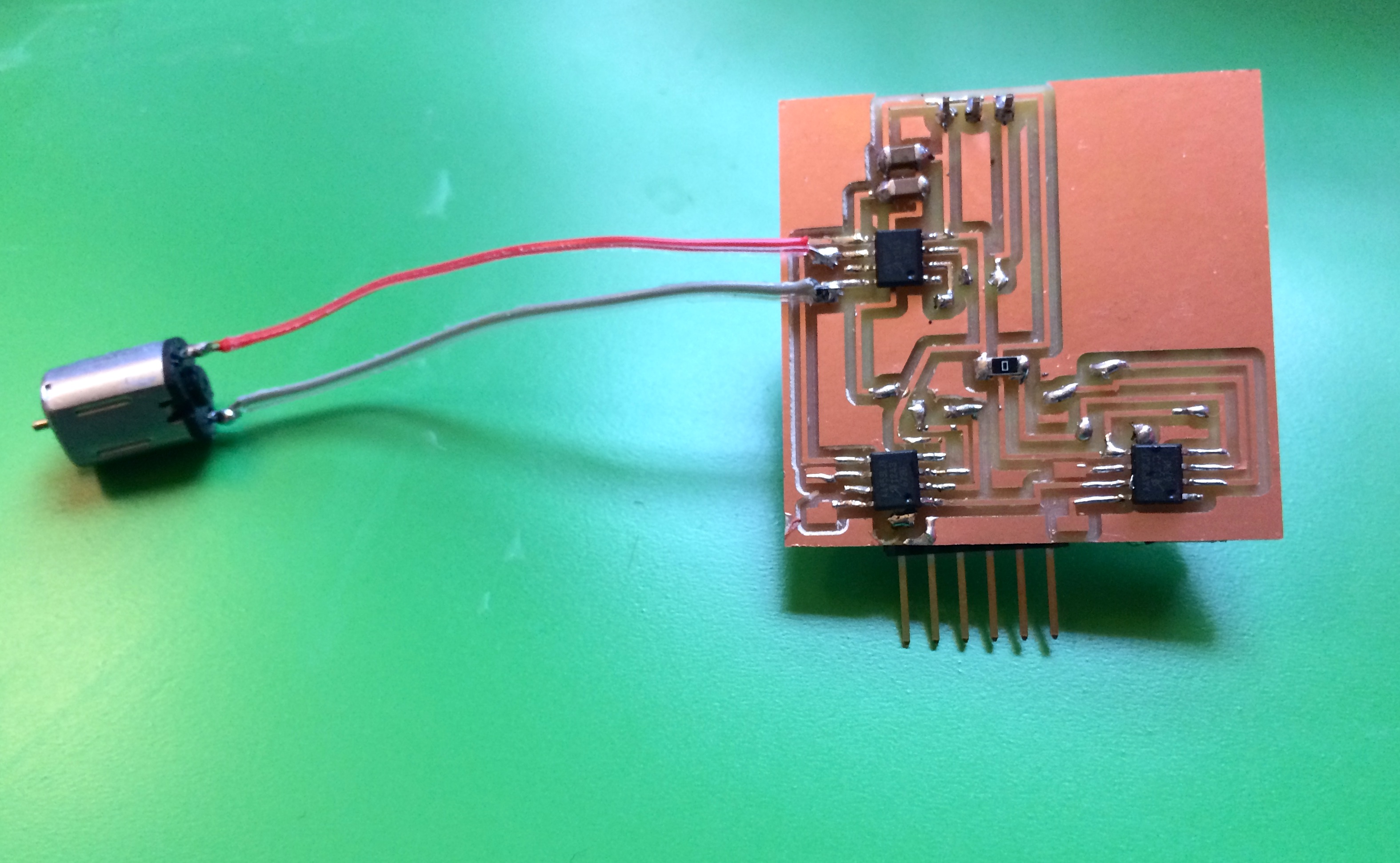
Originally, I was going to hack servos to run continuously, but I found some tiny DC motors on Sparkfun which are equally lightweight. For each motor, I have an H-bridge on the PCB. I also have an IR receiver diode for receiving IR signals from the joystick controller. To power the board, I am using small LiPo batteries and this connector which I soldered on the board.
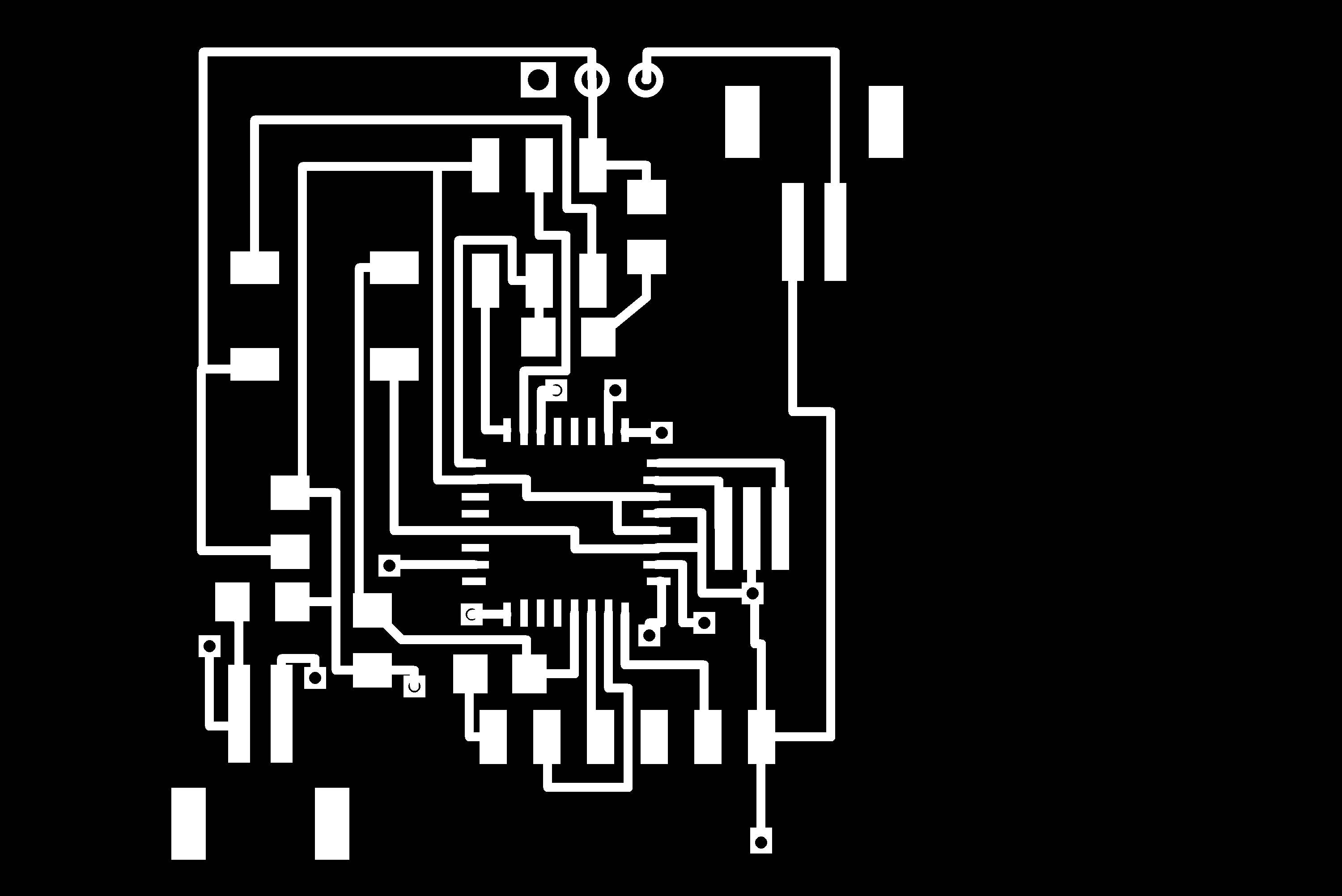
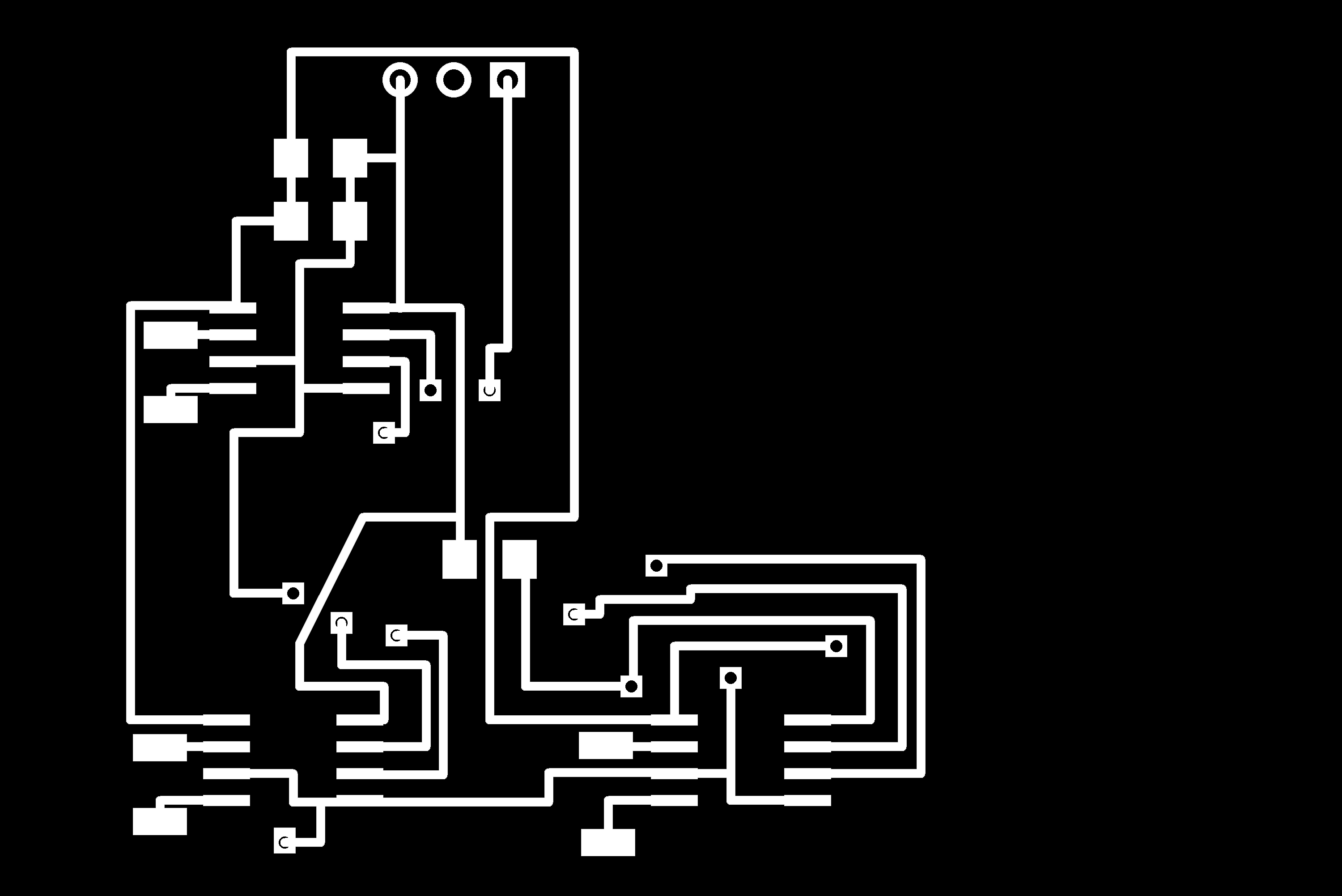
Files:- EAGLE files: schematic and board
- PNG files: front, back, holes, outline
Upcoming tasks: making the chasssis and inflatable body
I plan to make a chassis out of laser cut cardboard to house the motors with propellers and the PCB. For the inflatable body, I am planning to use mylar. This can either be done with an impulse sealer, or perhaps a regular conventional iron. As a failsafe, I bought a large hot dog shaped party balloon.
{kind=link}
{kind=link}
{kind=link}
{kind=link}