Machine Building Week has been an exciting and challenging adventure for our section as we embarked on the journey of creating a camera shot machine. My role in the project included assembling the four camera rails, which comprised two belt axes, as well as the design and fabrication of the pan-tilt arm mounts for the cameras. Throughout the process, I encountered numerous design iterations and challenges that pushed our skills to the limit.
Pan-Tilt Arm Design:
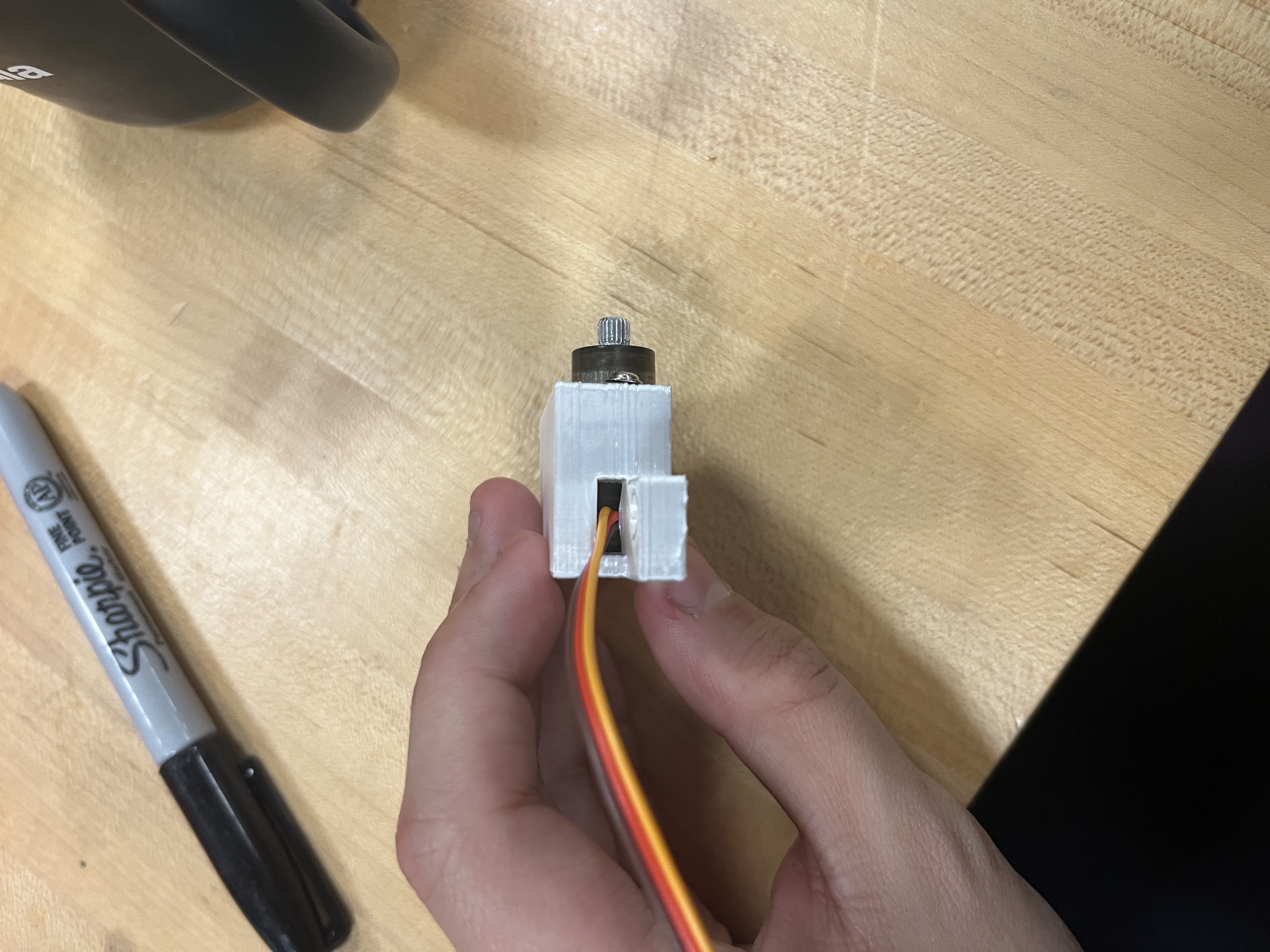
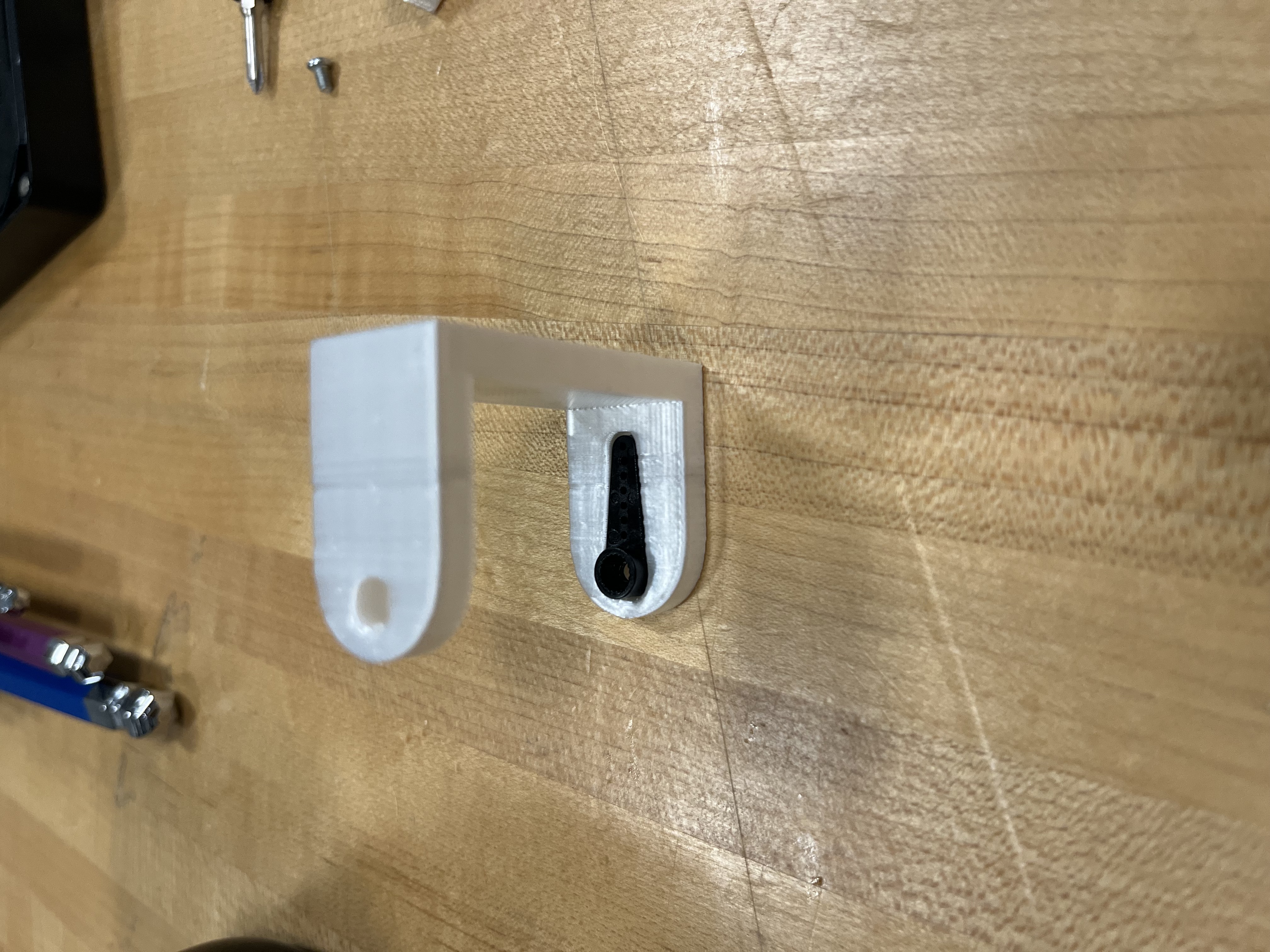
The road to our final camera shot robot design was a winding one, consisting of eight iterations for the pan-tilt arm. Each iteration revealed design errors that we had to address and refine. Some of the key design issues I encountered included:
- Thin Servo Mount Walls: Initially, the walls of our servo mounts were too thin, compromising their stability.
- Material Choice: Our choice of silk PLA for 3D printing proved to be weaker than regular PLA, leading to structural issues.
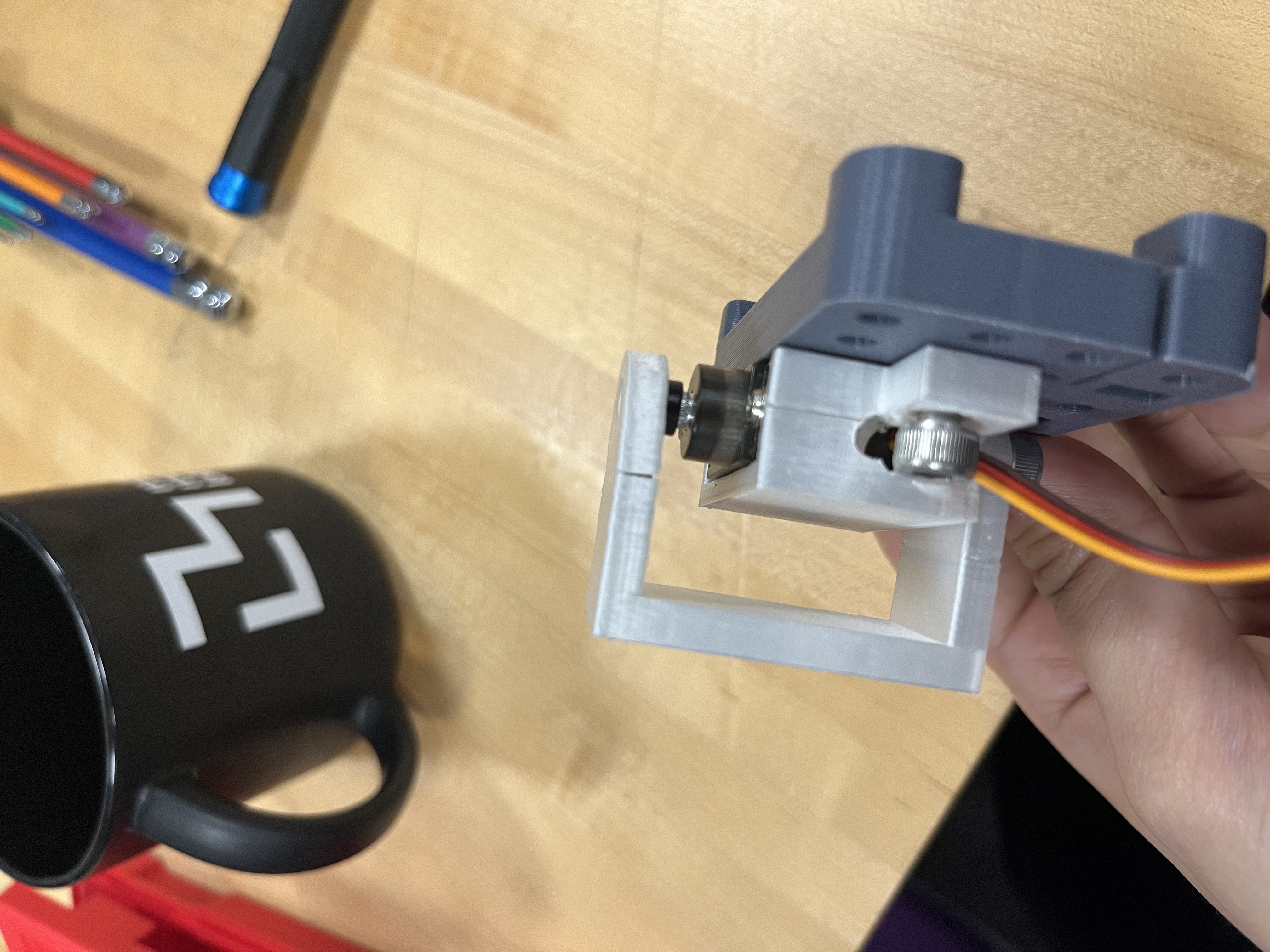
- Servo Arm Size and Fixation: We grappled with sizing and fixation problems related to the servo arms.
- Mounting Registration: The registration of certain components was overly tight, hindering assembly.
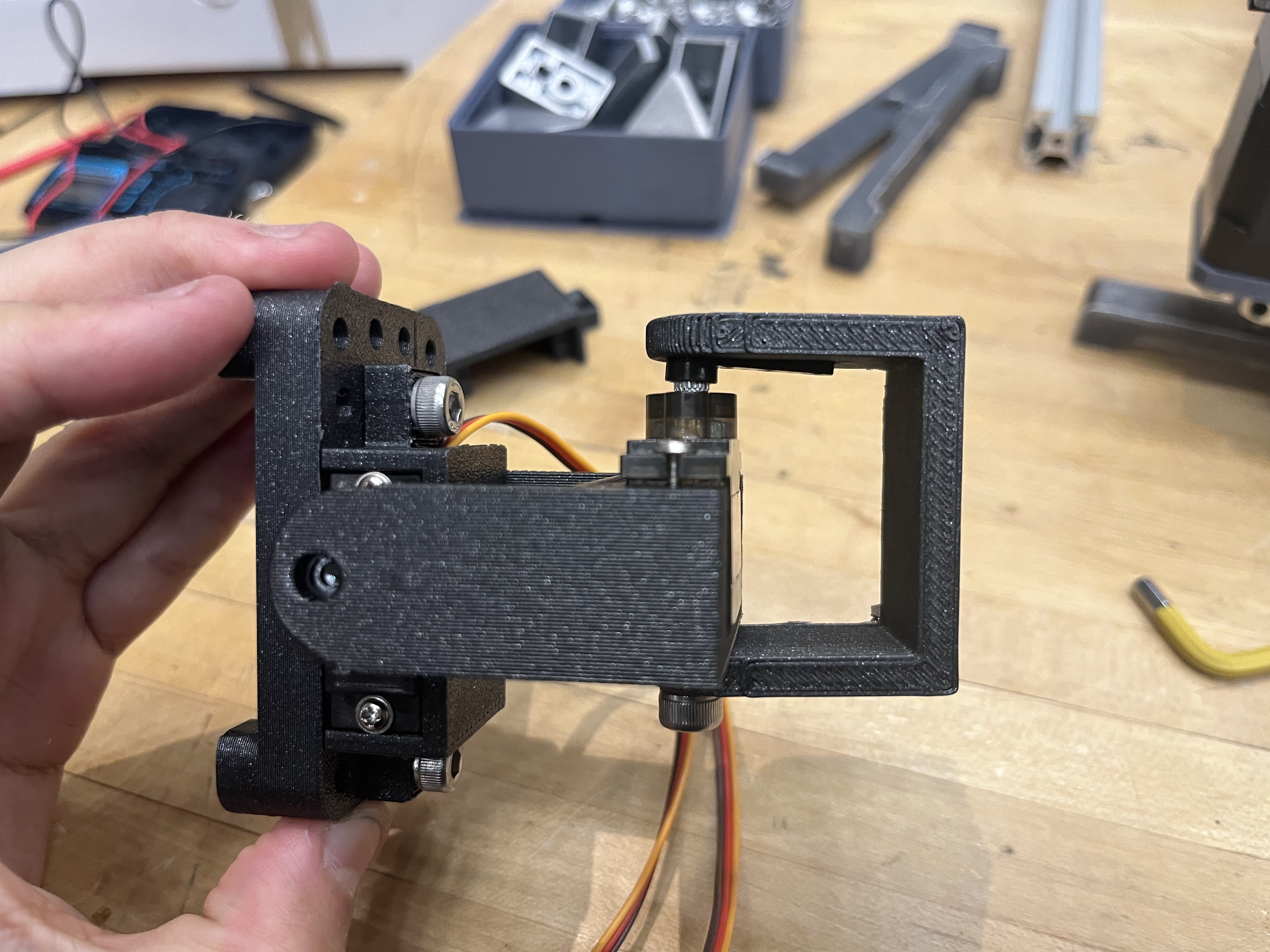
- Narrow Gap: The gap between the two walls of the pan and tilt arms was narrower than necessary, affecting movement.
The Online CAD file is here.
Other Challenges:
In addition to these design iterations, I faced other challenges:
- Weight Distribution: The weight of the webcam exceeded the capacity of the MG90S servo, particularly for the tilt arm.
- Solution: I disassembled the Logitech webcam, removing its stand, reducing the weight from 157 grams to 70 grams. This adjustment significantly improved the performance of the tilt arm.


- Cable Management: Managing the cables within the robot presented its own set of challenges.
- Solution: We designed a mount for two modular Xiao servo boards, attaching it atop the pan-tilt arm mount to neatly organize and secure the cables.
- Rail Track Stability: Ensuring the stability of the rail track proved essential for achieving smooth camera movement.
- Solution: To enhance stability, we incorporated a metal triangle plate, effectively fortifying the rail track.


Other Tasks:
In addition to the aforementioned challenges, I undertook various tasks to enhance the functionality of our camera shot machine:
- Solder Modular Things “Servo” boards
- Control Pan-tilt arm and the stepper motor on the Modular things online IDE
In conclusion, Machine Building Week has been an invaluable learning experience, pushing us to innovate and persevere in the face of design complexities and unforeseen obstacles. Our camera shot machine is a testament to our dedication and problem-solving abilities, and I look forward to further developments in the realm of machine building.