This week, we learned how to turn electronics desgin into real pcb. First, we can export the board as a Gerber file or svg file for further fabrication.
Workflow
- gerber2img (gervber to image)
- I choose gerber2img cuz gerber file is standardized format for pcb design.
- Both Kicad and Fusion can easily export gerber file in default.
- mods project - G-Code Mill 2D PCB (Program -> Open a progeram -> G-Code -> Mill 2D PCB)
- For trace cutting
- Import “copper gerber file” png
- Choose “isolate traces (1/64)”
- Press “Calculate” under “mill raster 2D”
- Automatically download its .nc file - For edge cutting
- Import “edge file”
- Choose “mill outline (1/32)”
- Press “Calculate” under “mill raster 2D”
- Automatically download its .nc file
- Milling Machine (ugsplatform)
- How to run: https://winder.github.io/ugs_website/guide/platform/
- Ctrl + Alt + T
- In the terminal
cd Desktop/ugsplatform-linux/bin/ ./ugsplatform- import Gcode (Load .nc file from the last step)
- Check if the drill is the right one (1/64” for traces, 1/32” for edge cutting)
- Do “macro” -> “lift z axis”
- Do “macro” -> “position z position”
- Position the drill to the right potision and set X0 and Y0
- Press “send” and start milling.
- Post process
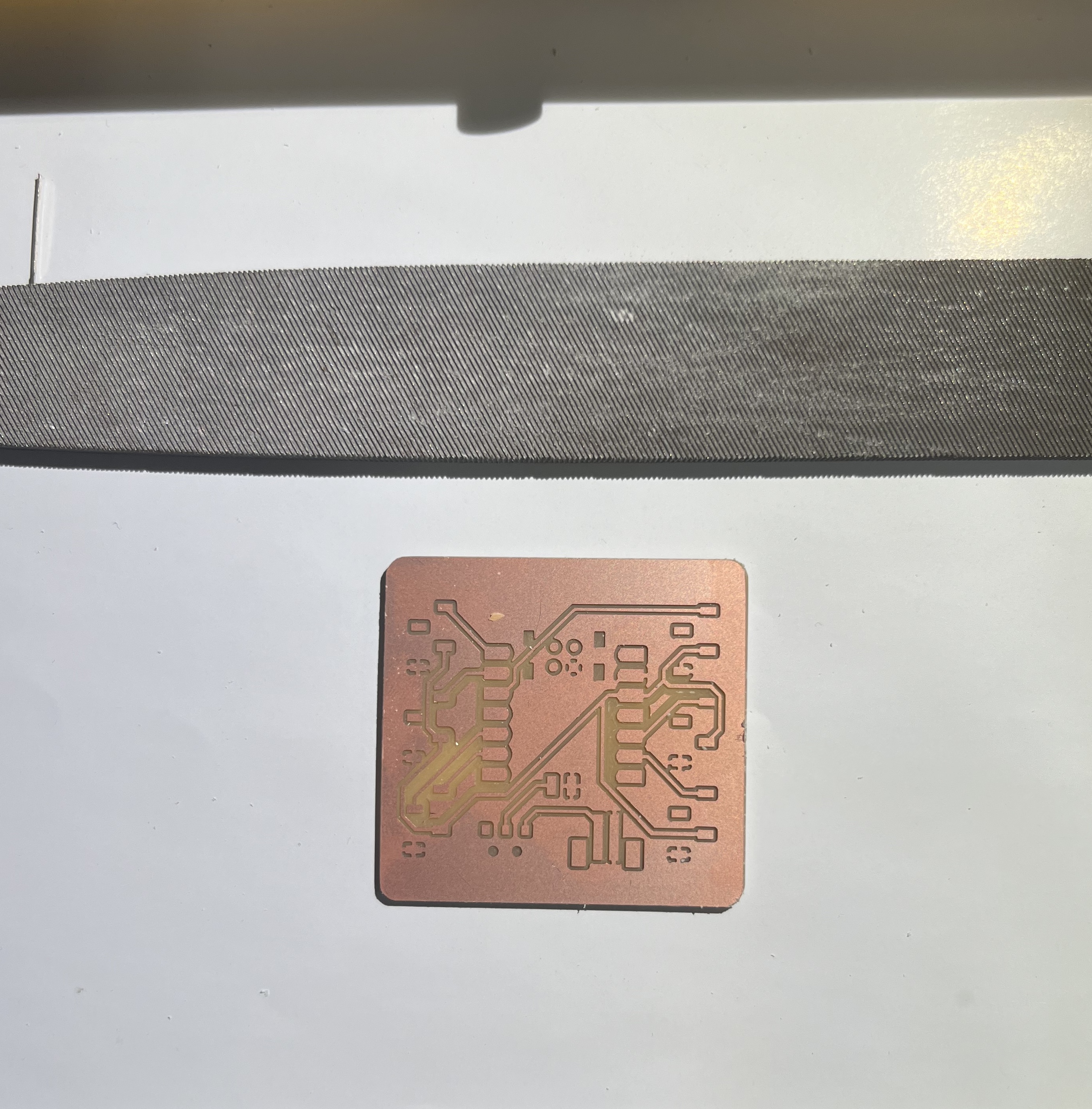
- Filing the edges with hand tool
- Alchahol wipe for removing oil and germ on top of the pcb
- Probing
- Using “beeping” mode on a digital multimeter to make sure the connection
- If there is mis-connection, use knife to cut off the trace
- Soldering
- Start to position the components (from the lowest height)
- Soldering it
- Probing again to make sure the connection
- Firmware upload and testing
- Upload the example code and test the basic blinking funtions
- Upload the main firmware for the boardm test the working funtions
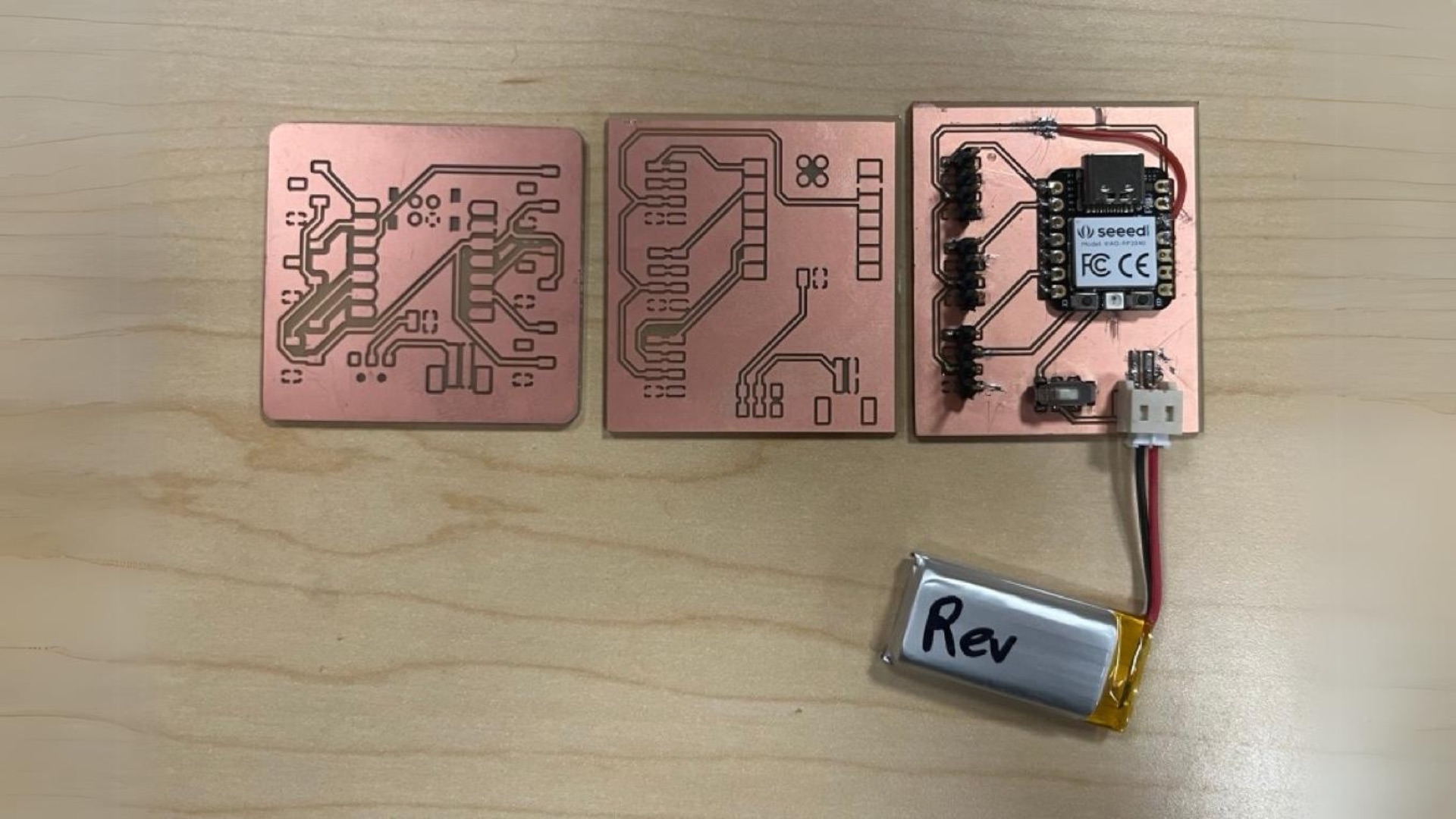
Fabrication Progress
Here is the very first pcb I milled at the lab.
But I soon found some bugs (I reverted the li-pi power socked pins), I fixed it and re-mill the second and third version.
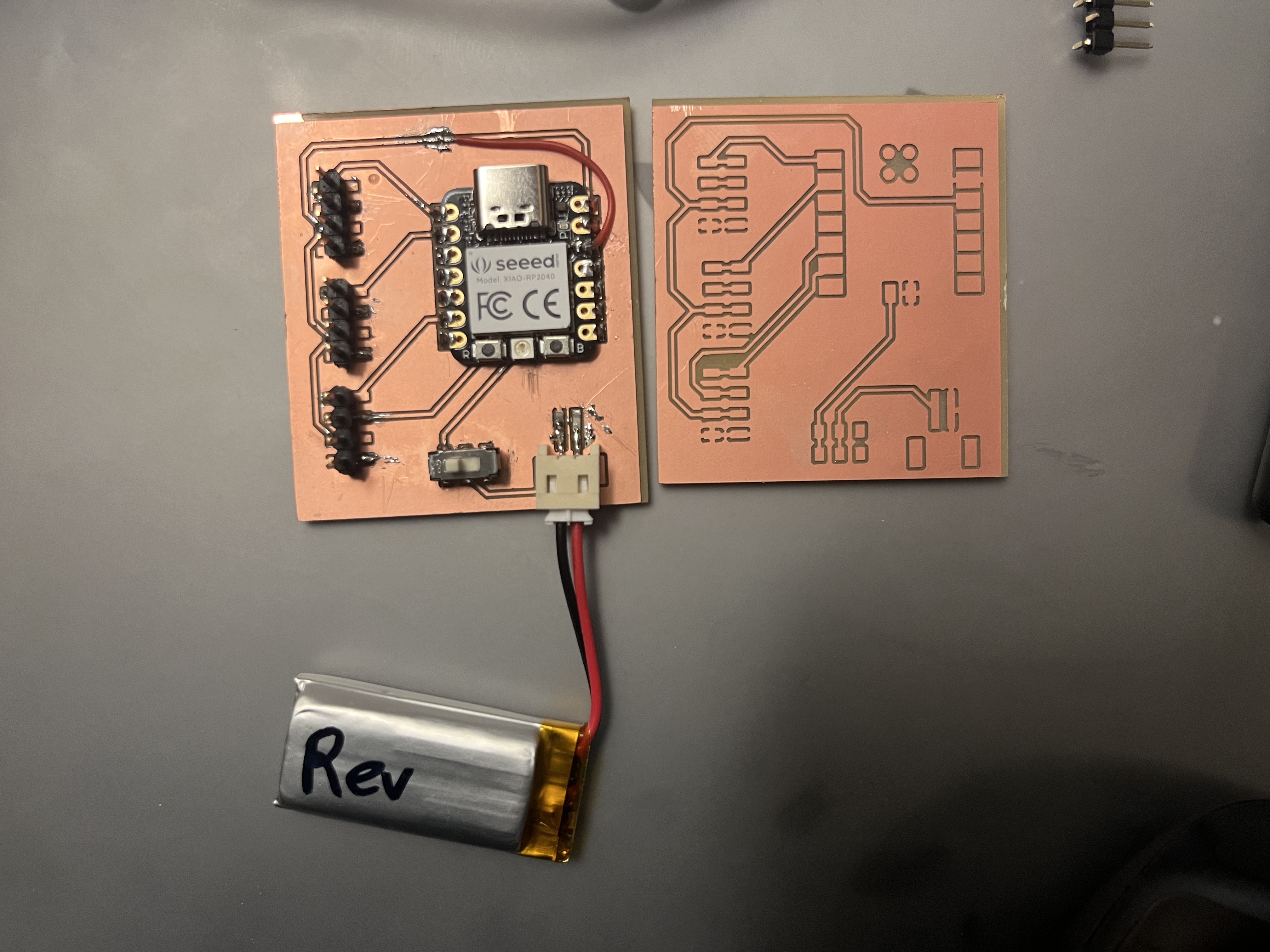
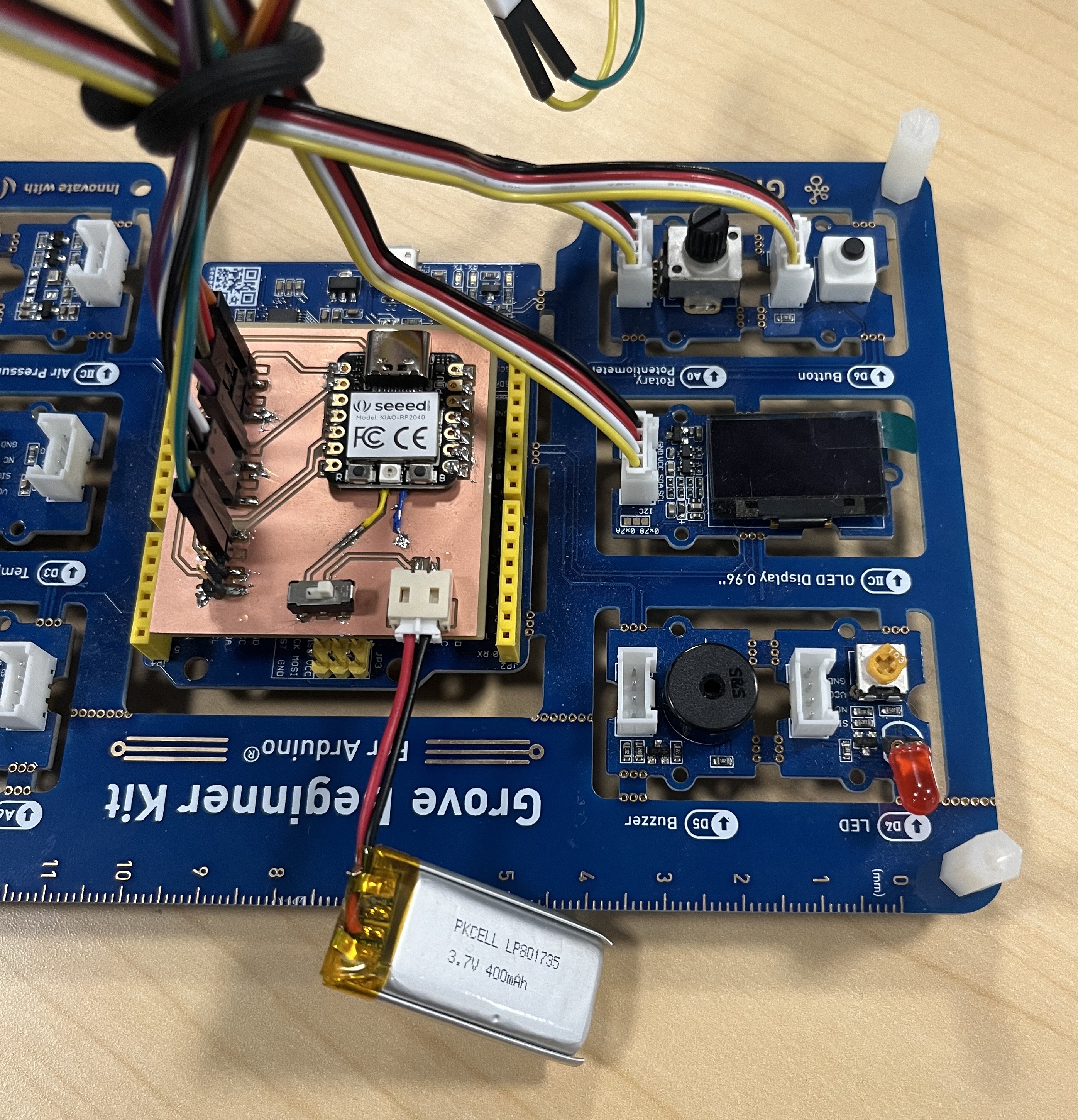
In the end, I got the funtional XIAO rp2040 dev board with a battery socket and 3 standard Grove connecter(I couldn’t find it in the lab, so I used male headers to replace it.)
Code
#include <Adafruit_NeoPixel.h>
#include <Arduino.h>
#include <U8g2lib.h>
#ifdef U8X8_HAVE_HW_SPI
#include <SPI.h>
#endif
#ifdef U8X8_HAVE_HW_I2C
#include <Wire.h>
#endif
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, /* clock=*/ SCL, /* data=*/ SDA, /* reset=*/ U8X8_PIN_NONE);
int Power = 11;
int PIN = 12;
#define NUMPIXELS 1
Adafruit_NeoPixel pixels(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
const int sensorPin = A0;
int sensorValue = 0;
int neoValue = 0;
int neoType = 0;
char neoColor[] = "no light";
const int buttonPin = D1;
int buttonState = 0;
int buttonPushCounter = 0; // counter for the number of button presses
int lastButtonState = 0; // previous state of the button
void setup() {
Serial.begin(9600);
pixels.begin();
pinMode(Power,OUTPUT);
digitalWrite(Power, HIGH);
u8g2.begin();
// declare the ledPin as an OUTPUT:
pinMode(sensorPin, INPUT);
// declare the buttonPin as an INPUT:
pinMode(buttonPin, INPUT);
}
void loop() {
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
button_edge_detection();
// read the value from the sensor:
sensorValue = analogRead(sensorPin);
neoValue = map(sensorValue, 0, 1023, 30, 255);
serialHandle();
neoUpdater();
oledUpdater();
Serial.println(neoValue); //0-1023}
}
void serialHandle(){
if (Serial.available() > 0) {
int inByte = Serial.read();
switch (inByte) {
case 'r':
strcpy(neoColor,"red");
neoType = inByte;
pixels.clear();
pixels.setPixelColor(0, pixels.Color(neoValue, 15, 15));
pixels.show();
break;
case 'g':
strcpy(neoColor,"green");
neoType = inByte;
pixels.clear();
pixels.setPixelColor(0, pixels.Color(15, neoValue, 15));
pixels.show();
break;
case 'b':
strcpy(neoColor,"blue");
neoType = inByte;
pixels.clear();
pixels.setPixelColor(0, pixels.Color(15, 15, neoValue));
pixels.show();
break;
case 'w':
strcpy(neoColor,"white");
neoType = inByte;
pixels.clear();
pixels.setPixelColor(0, pixels.Color(neoValue, neoValue, neoValue));
pixels.show();
break;
case 'e':
strcpy(neoColor,"no light");
neoType = inByte;
pixels.clear();
pixels.show();
break;
default:
pixels.show();
}
}
}
void neoUpdater(){
switch (neoType) {
case 'r':
pixels.clear();
pixels.setPixelColor(0, pixels.Color(neoValue, 15, 15));
pixels.show();
break;
case 'g':
pixels.clear();
pixels.setPixelColor(0, pixels.Color(15, neoValue, 15));
pixels.show();
break;
case 'b':
pixels.clear();
pixels.setPixelColor(0, pixels.Color(15, 15, neoValue));
pixels.show();
break;
case 'w':
pixels.clear();
pixels.setPixelColor(0, pixels.Color(15, 15, 15));
pixels.show();
break;
case 'e':
pixels.clear();
pixels.show();
break;
default:
pixels.show();
}
}
void oledUpdater(){
u8g2.clearBuffer(); // clear the internal memory
u8g2.setFont(u8g2_font_ncenB08_tr); // choose a suitable font
u8g2.drawStr(0,10,"HTM(A)A 2023"); // write something to the internal memory
u8g2.drawStr(0,30,"anaInput: ");
u8g2.setCursor(60, 30);
u8g2.print(sensorValue);
// uint32_t color = pixels.getPixelColor(0);
u8g2.drawStr(0,40,"neoValue: ");
u8g2.setCursor(60, 40);
u8g2.print(neoValue);
//u8g2.drawStr(0,60,"test light ");
u8g2.setCursor(0, 60);
u8g2.print(neoColor);
u8g2.sendBuffer(); // transfer internal memory to the display
Serial.println(neoValue);
}
void button_edge_detection(){
// compare the buttonState to its previous state
if (buttonState != lastButtonState) {
// if the state has changed, increment the counter
if (buttonState == HIGH) {
// if the current state is HIGH then the button went from off to on:
buttonPushCounter++;
Serial.println("on");
Serial.print("number of button pushes: ");
Serial.println(buttonPushCounter);
} else {
// if the current state is LOW then the button went from on to off:
Serial.println("off");
}
// Delay a little bit to avoid bouncing
delay(50);
}
// save the current state as the last state, for next time through the loop
lastButtonState = buttonState;
// turns on the LED every four button pushes by checking the modulo of the
// button push counter. the modulo function gives you the remainder of the
// division of two numbers:
if (buttonPushCounter % 5 == 0) {
// check if the pushbutton is pressed. If it is, the buttonState is HIGH:
Serial.println("no light");
neoType = int('e');
strcpy(neoColor,"no light");
}
else if(buttonPushCounter % 5 == 1){
Serial.println("r");
neoType = int('r');
strcpy(neoColor,"red");
}
else if(buttonPushCounter % 5 == 2){
Serial.println("g");
neoType = int('g');
strcpy(neoColor,"green");
}
else if(buttonPushCounter % 5 == 3){
Serial.println("b");
neoType = int('b');
strcpy(neoColor,"blue");
}
else { //buttonPushCounter % 5 == 4
Serial.println("w");
neoType = int('w');
strcpy(neoColor,"white");
}
}